










Speed control in 3 phase induction motor
- 1. SPEED CONTROL OF THREE PHASE INDUCTION MOTORS
- 2. INTRODUCTION ● Speed control in induction motors is required for efficient operation ● Various methods of speed control through semiconductor devices: 1. Stator voltage control 2. Stator frequency control 3. Stator voltage control 4. Stator current control 5. Static Rotor Resistance Control 6. Slip Energy Recovery Control
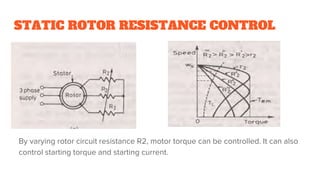
- 3. STATIC ROTOR RESISTANCE CONTROL By varying rotor circuit resistance R2, motor torque can be controlled. It can also control starting torque and starting current.
- 4. ● Three phase resistor is replaced by three phase diode rectifier, chopper and one resistor. ● Function of inductor Ld is to smoothen current Id ● GTO chopper allows effective rotor circuit resistance to be varied for speed control of SRIM. ● Diode rectifier converts slip frequency input power to dc at its output terminals.
- 5. Working: ● When chopper is on, Vdc=Vd=0, resistance R gets short circuited. ● When chopper is off, Vdc=Vd and resistance in rotor circuit is R.
- 6. Disadvantages: ● Reduced efficiency at low speeds. ● Speed changes widely with load variation ● Voltages and currents are imbalanced if R2 not equal
- 7. Slip Power Recovery Schemes ● In this chopper method of speed control of SRIM, slip power is dissipated in external resistance and it leads to poor efficiency of drive. But instead of wasting slip power in rotor circuit resistance, it can be converted by various schemes for speed control of SRIM. ● They are of two types: 1. Static Kramer drive 2. Static Scherbius drive
- 8. Static Kramer Drive ● Slip frequency power from rotor circuit is converted to dc voltage which is converted to linne frequency and pumped back to ac source. ● It offers speed control below synchronous speed as slip power flows only in one direction.
- 10. Static Scherbius Drive ● DC Link Scherbius Drive
- 11. Subsynchronous Speed Control ● Slip power is removed from rotor circuit and is pumped back into ac supply. ● Bridge 1 has firing angle less than 90 whereas bridge 2 has firing angle greater than 90. Bridge 1 works as rectifier and bridge 2 as line commutated inverter for subsynchronous motor control. Slip power flows from rotor circuit to bridge 1 then 2 , transformer and supply.
- 12. Supersynchronous Speed Control ● Additional power is fed to rotor circuit at slip frequency. ● Bridge 1 works as line commutated inverter with firing angle greater than 90 and bridge 2 as rectifier with firing angle less than 90. Power flows in opposite direction
- 13. Disadvantages ● Near synchronous speed, slip frequency emfs are insufficient for natural commutation of SCR, hence force commutation is used due to which above speed operation complicates static converter system and cancels advantages of simplicity and economy of the drive. ● Scherbius drive is expensive than Static Kramer drive because 6 diodes are replaced by 6 SCRs and their controlled circuitry.
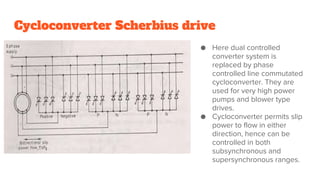
- 14. Cycloconverter Scherbius drive ● Here dual controlled converter system is replaced by phase controlled line commutated cycloconverter. They are used for very high power pumps and blower type drives. ● Cycloconverter permits slip power to flow in either direction, hence can be controlled in both subsynchronous and supersynchronous ranges.