一般道実走行における 自車センサ情報を用いた車線変更の検出
•Download as PPTX, PDF•
2 likes•1,267 views

本論文では,速度や操舵角など安価な自車センサ情報のみを用た車線変更検出手法について述べる.車両走行データは,a) 多変量かつ時系列,b) 走行時の周辺環境により変化しやすい,c) 明確な区切りがないという特徴を持つ.そのため,分析に用いる特徴量やアルゴリズムは自明ではない.提案手法では,複数のセンサ情報を組合せ,データを数秒間の窓に分割し,汎用的な教師あり学習アルゴリズムにより車線変更を検出する.一般道実走行データを用いた実験において,アンサンブル学習やインスタンスに基づく学習を用いれば,他のアルゴリズムより高い検出精度が得られることを確認した.






















一般道実走行における 自車センサ情報を用いた車線変更の検出
- 1. 根山亮1 福島真太朗1 宮崎勝彦2 那和一成1 1トヨタIT開発センター 2トヨタ自動車 1 WebDB Forum 2015 @ 芝浦工大, 11/25 TOYOTA InfoTechnology Center Co., Ltd.
- 2. TOYOTA InfoTechnology Center Co., Ltd. 2 クラウドとつながることでクルマがより安全・快適に 移動体通信 広帯域化 車載機 低消費電力化
- 3. TOYOTA InfoTechnology Center Co., Ltd. 3 クルマに新しい付加価値が求められている T型フォード(1908年~) 電気自動車コムス(2012年~) 「走る・曲がる・止まる」 コモディティ化 内燃機関 モーター
- 4. TOYOTA InfoTechnology Center Co., Ltd. 4 車線変更 検出 車線変更 多発地点 抽出 車線変更お知らせサービス 集合知の活用が切り札に 車両走行データ 情報提供 この先、車線変更あり 注意して走行しましょう
- 5. TOYOTA InfoTechnology Center Co., Ltd. 5 訓練用 データ ラベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報 速度 前後加速度 ヨー角速度 操舵角
- 6. TOYOTA InfoTechnology Center Co., Ltd. 6 【特長】 ① 速度や操舵角など自車センサ情報のみを使う 周辺環境情報やドライバ情報は一切使わない ② 一般道の実データを対象とする シミュレータ・データではない 高速道に限定しない 【実験結果】 東京都内の一般道実データにおいて アンサンブル学習やインスタンスに基づく学習を用い 他のアルゴリズムより高い検出精度が得られることを確認
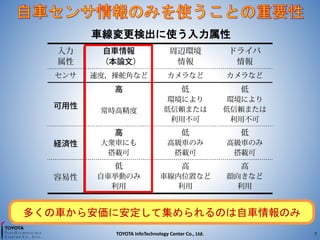
- 7. TOYOTA InfoTechnology Center Co., Ltd. 7 車線変更検出に使う入力属性 多くの車から安価に安定して集められるのは自車情報のみ
- 8. TOYOTA InfoTechnology Center Co., Ltd. 8 車線変更検出手法の比較 ①自車情報のみ ②一般道実データ は本研究が初
- 9. TOYOTA InfoTechnology Center Co., Ltd. 9 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報
- 10. TOYOTA InfoTechnology Center Co., Ltd. 10 【車両走行データの特徴】 ①多次元かつ時系列 ②走行時の周辺環境により変化しやすい ③明確な区切りがない 【課題】 車線変更検出に適した 特徴量 アルゴリズム は何か?
- 11. TOYOTA InfoTechnology Center Co., Ltd. 11 数秒程度の時間窓に区切れば特徴を取り出せる 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報 xt t W1 W2 W3 W4 W5 W6 l1=0 l2=0 l3=1 l4=1 l5=0 l6=0 入 力 属 性 時 間 窓 速度 前後加速度 ヨー角速度 操舵角 車線変更 車線変更にかかる時間の分布 1回の車線変更は 2~4秒程度 車線維持 車線維持
- 12. TOYOTA InfoTechnology Center Co., Ltd. 12 ヨー角速度速度 属性選択 教師あり 学習アルゴリズム 選択された属性の値を特徴ベクトルとする 入力属性の候補 ヨー角速度速度 前後加速度 操舵角 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報 訓練/分類 W3 特徴ベクトル
- 13. TOYOTA InfoTechnology Center Co., Ltd. 13 アンサンブル学習とインスタンスに基づく学習を採用 【車両走行データの特徴】 ① 多次元かつ時系列 ② 走行時の周辺環境により変化しやすい ③ 明確な区切りがない アルゴリズム アンサンブル学習 インスタンスに基づく学習 Support Vector Machine (SVM) 決定木 (DTree) ランダム (RND)Random Forests (RF) LogitBoost (LB) ユークリッド距 離+k-最近傍法 (EC+kNN) Dynamic Time Warping + k-最 近傍法 (DTW+kNN) 複雑な 構造への ロバスト性 ✓ ✓ ✓ ✓ ✓ 適切な カーネルを 選ぶ必要あり 高次元 少量データ での精度 ✓ ✓ 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報
- 14. 【実験条件】 入力属性 T S = { 速度, 前後加速度, ヨー角速度, 操舵角 }, T ⊆ S, T≠∅ パラメータ 【評価指標】 TOYOTA InfoTechnology Center Co., Ltd. 14 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報 混同行列 車線変更 検出精度 適合率 再現率 F-値 正解率 @10Hz 【入力データ】 都内一般道実走行(110回;2名のドライバ) 5分割交差検定の平均値を評価 車線変更 車線維持 訓練用データ 873 7,428 評価用データ 210 1,815 ※窓幅w=75の場合 不均衡 サンプル数の内訳
- 15. TOYOTA InfoTechnology Center Co., Ltd. 15 各アルゴリズムの精度( F-値最大;括弧内は標準偏差) 各アルゴリズムの実験条件( F-値最大) アンサンブル学習とインスタンスに基づく学習で良好な結果 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報 ヨー角速度・ 操舵角に加え 速度も利用 車線維持の アンダー サンプリングの 効果 参考:Morris2011(RVM)での F-値は0.683
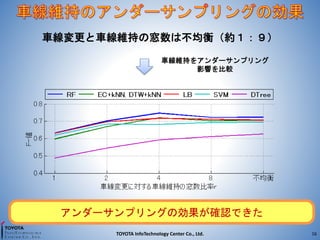
- 16. TOYOTA InfoTechnology Center Co., Ltd. 16 アンダーサンプリングの効果が確認できた 車線変更と車線維持の窓数は不均衡(約1:9) 車線維持をアンダーサンプリング 影響を比較
- 17. 車線変更 検出 車線変更 多発地点 抽出 車線変更お知ら せサービス 車両走行データ 情報提供 こ の先、 車線変更あり 注意し て走行し まし ょ う TOYOTA InfoTechnology Center Co., Ltd. 17 Random Forests(RF)において誤差を小さく抑えられた 確率分布の推定誤差;小さいほどよい 0m 900m ①22回の走行から 車線変更を検出 ②場所ごとの 発生確率を推定
- 18. 【特長】 ① 速度や操舵角など自車センサ情報のみを使う 周辺環境情報やドライバ情報は一切使わない ② 一般道の実データを対象とする シミュレータ・データではない 高速道に限定しない 【実験結果】 東京都内の一般道実データにおいて アンサンブル学習や インスタンスに基づく学習を用い 他のアルゴリズムより高い検出精度が 得られることを確認 【今後の展望】 車線変更検出に有効な特徴量の分析 データ量を増やした検証(サンプル数、ドライバ 数、経路)および先行研究との定量的な比較 TOYOTA InfoTechnology Center Co., Ltd. 18
- 19. TOYOTA InfoTechnology Center Co., Ltd. 19 論文賞セッション 本日14:20~ 教師なし学習による アプローチ
- 20. TOYOTA InfoTechnology Center Co., Ltd. 20 以下、補足資料
- 21. TOYOTA InfoTechnology Center Co., Ltd. 21 y1=0 y6=0 車両 左車線 右車線 訓練用 データ ラ ベル 付与 窓化 窓化 訓練 車線維持と 車線変更の分類 車線変更検出結果 車線変更 発生確率 推定 車線変更 多発地点 情報 車両が白線上にある状態を車線変更と定義
- 22. TOYOTA InfoTechnology Center Co., Ltd. 22 速 度 前 後 加 速 度 ヨ ー 角 速 度 操 舵 角 車 線 変 更 車線維持 車線変更 入力データに明確な違いはない
- 23. TOYOTA InfoTechnology Center Co., Ltd. 23 偽陽性は実用上問題なし;偽陰性は改善の余地あり 車線変更の近傍 車線変更の見逃し 検出結果と近傍ラベルの平均値の関係 yt 0 1 近傍ラベル@t0 yt平均値=0 近傍ラベル@t1 yt平均値=0.67 tt0 t1 近傍ラ ベルの定義 時間窓近傍での ラベルの傾向を表現 分布の観察
- 24. TOYOTA InfoTechnology Center Co., Ltd. 24 数秒程度の時間窓に分割すれば特徴を取り出せる 車線変更にかかる時間の分布 1回の車線変更は 2~4秒程度
- 25. TOYOTA InfoTechnology Center Co., Ltd. クラウドとつながることでクルマがより安全・快適に
Editor's Notes
- ご紹介いただき、ありがとうございます。 トヨタIT開発センターの根山と申します。 本日はよろしくお願いいたします。 #本日は一般道実走行における自車センサ情報を用いた車線変更の検出について発表させていただきます。
- まず、本研究の背景ですが、近年の移動体通信の広帯域化や車載機の低商品電力化に伴い、 車がクラウドとつながりより安全・快適となることが期待されており、 コネクティッド・カーとして注目されています。
- 一方、電気自動車の登場により車の「走る・曲がる・止まる」機能が コモディティ化される可能性があり、 クルマに新しい付加価値が求められています。
- そんな中、私たちは、大量の車両走行データを解析し、 そこから得られた集合知を活用することが、 新価値創造の切り札になりえると考えています。 今回、私共は、運転の中でもドライバに負担のかかる 運転行動の1つである車線変更に着目し、 車線変更を検出する手法の開発に取組みました。 クラウドに収集した大量の車両走行データから、車線変更の検出が可能になれば、 車線変更が多く発生する地点をあらかじめ抽出できます。 車線変更が多い場所に通りがかったドライバに前もって情報提供することで、 ドライバが余裕を持って車線変更できるようになると考えています。 また、自動運転においても、他車両の障害物による車線変更を検知することで、 予め車線変更しておき、スムーズな運転をするといった応用も考えられます。 私たちは、このような車線変更お知らせサービスを提案しています。
- 提案するシステムとサービスの構成を説明します。 まず、車両走行データとして、時系列の、速度、前後加速度、ヨー角速度、操舵角を、 移動体通信を経由してクラウドのサーバに収集します。 事前に収集したデータには車線維持または車線変更のラベルを付与し、これを訓練用データとします。 次に時系列のデータを数秒程度の時間窓に区切り、1つの時間窓を特徴ベクトルとして扱います。 訓練用データを汎用的な教師あり学習アルゴリズムに入力することで、車線変更の検出ルールを得ます。 新たに収集された未知のデータに対して、同様の窓化により特徴ベクトルを取り出し、 車線変更の検出ルールを適用することで、 車線変更を検出します。 こうして得られた車線変更がどこで頻繁に起きているのかを、 車両の位置情報を使って解析することで、車線変更が多く発生する 地点を求めます。 以上が、提案するシステムとサービスの構成です。
- 本研究の貢献をまとめます。 研究の特長は2点あります。 まず、1点目は、速度や操舵角などの自車の車両挙動に関するセンサ情報のみを使い、 周辺環境情報やドライバ情報を一切使わないということです。 2点目は、一般道の実データを対象とすることです。 つまり、シミュレータ・データではなく実データを使い、高速道路に限定せず、一般道を対象にしています。 実験の結果、東京都内の一般道を走行する実データで、アンサンブル学習やインスタンスに基づく学習を用いて、 他のアルゴリズムより高い検出精度が得られることを確認しました。
- 本研究の特長の1つである自車センサ情報のみを使うことの重要性を説明します。 車線変更検出に使う入力属性には、 自車情報のほかに、カメラなどから得る周辺環境情報やドライバ情報が考えられます。 しかし、これらの情報は環境により信頼性が得られなかったり利用できなかったりするため、 可用性が低いのが問題です。また、センサが高価で経済性が低く、 高級車しか搭載できないため大量のデータを集められないという問題もあります。 多くの車から安価に安定して集められるのは自車情報のみであるため、 今回私たちは自車情報のみを使った車線変更検出に取組みました。
- 先行研究との比較について述べます. 先行研究では、自車情報に加えて、早期検出のため、周辺環境情報やドライバ情報を使います。 また、多くはシミュレータや高速道路を対象としています。 自車情報のみを用いて一般道実データを対象として車線変更を検出する取組みは、本研究が初となります。
- 次に、車両走行データの生データを可視化した結果を紹介します。 上のグラフが車両走行データの時系列で、速度、加速度、ヨー角速度、操舵角が表示されています。 下の映像が、それぞれ自車の前方と後方のカメラ映像になります。 車線変更のラベルをオレンジ色の領域として示しています。 本研究では、動画を確認しながら、車両が白線上にある状態を車線変更、 それ以外の状態を車線維持としてラベル付けしました。 それでは、動画をご覧ください。 車線変更中は、ヨー角速度や操舵角に特徴が表れることが分かります。
- 研究課題をまとめます。 車両走行データは、多次元かつ時系列で走行時の周辺環境により変化しやすく、明確な区切りがないのが特徴です。 そうしたデータに対して、車線変更検出に適した特徴量、アルゴリズムは何か?という問いが本研究の課題となります。
- 次に区切りのない時系列の扱いについて考えます。 今回、1回の車線変更にかかる時間の分布を調べたところ、概ね2秒から4秒であることが分かりました。 このことから、区切りのない時系列を、数秒程度の窓に分割すれば、特徴を取り出せると考えました。 そこで、元の時系列データを、重なりを持つ時間窓として分割しました。 また、時間窓の終了端のラベルをその時間窓のラベルとして定義しました。 これは、終了端での状態は、それまでの車両挙動により決定されると考えたためです。
- 次に特徴ベクトルを定義します。 今回は、入力属性の候補から、すべての組合せを作り、 アルゴリズムごとにもっとも精度のよい組合せを選ぶこととしました。 時間窓内の値を属性ごとに並べることで特徴ベクトルを作り、 教師あり学習アルゴリズムによって訓練と分類を行いました。
- 最後にアルゴリズムの選定について述べます。 先ほど述べました車両走行データの特徴から、 アンサンブル学習とインスタンスに基づく学習が有望と考えました。 アンサンブル学習として、Random ForestとLogitBoost、インスタンスに基づく学習として ユークリッド距離に基づくk-最近傍法および、Dynamic Time Warpingに基づくk-最近傍法を選びました。 これらのアルゴリズムは複雑な構造へのロバスト性が高いと考えられます。 また、学習器にランダム性を持たせたRandom Forests k-最近傍法で用いる距離に時間方向の伸縮を許すDynamic Time Warpingとすることで、 高次元空間内の少量データでも精度を上げられると考えました。 比較対象として、SVM、決定木、車線変更を無作為に選ぶランダムを選びました。 SVMは先行研究でも使われており、 ロバスト性も高いと考えられますが、 適切なカーネル関数を選ぶ必要があり使い方が難しいという課題があります。
- 実験方法について説明します。 入力データは、都内一般道の実走行データで、2名のドライバがのべ110回分の走行を用いました。 実験データに現われる車線変更と車線維持の内訳はこちらにある通りで、 車線変更のサンプル数に対して車線維持のサンプル数が多い不均衡データとなります。 実験は、網羅的な実験条件の組合せを試し、アルゴリズムごとに精度が最も良い組合せを選びました。 入力属性は、候補となる、速度、前後加速度、ヨー角速度、そして操舵角のすべての空でない部分集合で試しました。 パラメータはアルゴリズムごとにいくつかのパラメータを設定しました。 窓幅は、5秒から15秒までの範囲を与えました。 また、先ほど述べた通りオリジナルのデータは不均衡データのため、そのままでは車線維持に 偏った分類をしてしまう可能性が考えられます。 そこで、不均衡のまま与える実験に加え、訓練データとして与える車線維持の窓数の 比率1から8となるように車線維持をアンダーサンプリングする実験も行いました。 評価尺度は、車線変更を検出する精度として、適合率、再現率、F-値を求めました。 また、車線変更と車線維持を正しく分類できるかどうかの正解率も求めました。 これらの指標に対して5分割交差検定の平均値を評価しました。
- 実験結果です。 アルゴリズムごとにF-値が最大となる実験条件での結果を抽出しました。 F-値が0.7を超えたのは、RF, LB, EC+kNN, DTW+kNNでした。 すなわちアンサンブル学習とインスタンスに基づく学習で良好な結果が得られました。 全てのアルゴリズムにおいて、ヨー角速度もしくは操舵角といった横方向の車両挙動・操作を表す入力属性が使われましたが、 精度の高かったアルゴリズムについては、速度の情報も用いていており、これが精度向上要因と考えます。 また、車線維持をアンダーサンプリングした効果も見られました。
- 車線変更のアンダーサンプリングの効果についてます。 車線変更に対する車線維持の窓数比率を変化させた時のF-値はこちらのようになります。 アンダーサンプリングは車線変更と車線維持の比率を1:4にすることで良好な結果が得られました。 これは、車線維持が多すぎると車線維持に偏った検出をしてしまう一方で、減らしすぎると、 車線変更の多様性に追従できなくなるためと考えられます。
- アプリケーションとして、冒頭でお話しした車線変更お知らせサービスを想定し、 車線変更の発生頻度を求め、その誤差を評価しました。 今回、同じ場所を22回走行したデータから車線変更を検出し、 場所ごとの車線変更発生確率を確率密度推定により推定しました。 これを真値と比較することで誤差を求めました。 この実験においては、RFにおいて誤差を小さく抑えられるという結果が出ています。
- 本研究の貢献をまとめます。 研究の特長は2点あります。 まず、1点目は、速度や操舵角などの自車の車両挙動に関するセンサ情報のみを使い、 周辺環境情報やドライバ情報を一切使わないということです。 2点目は、一般道の実データを対象とすることです。 つまり、シミュレータ・データではなく実データを使い、高速道路に限定せず、一般道を対象にしています。 実験の結果、東京都内の一般道を走行する実データで、アンサンブル学習やインスタンスに基づく学習を用いて、 他のアルゴリズムより高い検出精度が得られることを確認しました。
- 最後にご紹介になりますが、 車両走行データから教師なし学習によりパターンを検出する研究を、 熊本大学櫻井研究室と共同で行っております。 本日の論文賞セッションにてご報告させていただきます。 ご清聴ありがとうございました。
- 近年の移動体通信の広帯域化や車載機の低商品電力化に伴い、 車がクラウドとつながりより安全快適となることが期待されており、 コネクティッド・カーとして注目されています。