



















Stereoscopic Vision
- 2. Humans are extremely good a judging the relative distances of objects and can very easily judge which objects are closer and which are further away. This ability to perceive depth information within a visual scene is greatly improved by having two eyes that are spatially separated. However, depth perception is not solely a binocular phenomenon there are a number of monocular cues that can also give information about depth: Motion Parallax Relative size of known objects Light and shade Geometric Perspective Surface texture Overlapping contours
- 4. Relative size of known objects
- 5. Texture
- 6. Binocular Depth Cues & Stereopsis
- 7. F F F Uncrossed retinal disparity Crossed retinal disparity Corresponding points Retinal Disparity
- 8. In a binocular subject the eyes are separated horizontally and hence receive slightly different views of objects at different distances. The disparity information combined with information derived from the vergence system provides precise quantitative information about object distance. The perception of depth that is produced by binocular retinal disparity is called STEREOPSIS. Stereopsis is important for producing finely tuned depth perception at near distances (particularly within arms length) when other depth cues are absent. Stereopsis is specified as an angle at the eye (unit = min arc or sec arc)
- 9. The Vieth-M ü ller Circle
- 10. F Left Eye Right Eye f l f r C l C r Vieth-M ü ller Circle F P P p 1 p r l r
- 11. P The point P, unlike point F, is not fixated but lies on the V-M circle. Rays from this point strike the retina at points p l & p r . The convergence angle of this point = P since it lies on the circumference of the V-M circle : P= F, Since C l & C r fall on the same circle the angles l & r are equal. Therefore the displacements p l & p r are equal and are corresponding points. F P Left Eye Right Eye f l f r p 1 p r l r C l C r Vieth-M ü ller Circle F
- 13. Binocular disparity produces stereopsis only if the retinal disparity is not too great. If retinal disparity does not exceed a certain limit, then retinal images are fused with the resultant perception of depth – stereopsis. The area on the retina that corresponds to this area of binocular fusion is referred to as Panum’s Fusional Area. If retinal disparity is too great, binocular fusion does not occur. The images fall on retinal positions that signal very different positions and results in physiological diplopia.
- 14. F F F Corresponding points Retinal Disparity
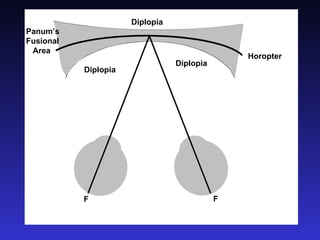
- 15. F F Horopter Panum’s Fusional Area Diplopia Diplopia Diplopia
- 16. The Vieth-Müller Circle describes in very geometrical terms how stereopsis might come about. A more physiologically based concept for describing stereopsis is the HOROPTER. The horopter can be simply described as the locus of all points in the binocular field that are seen as single. As shown in the previous slide diagram below it can be thought of as a curved line that passes through the fixation point that plots corresponding points.
- 17. F F Horopter Panum’s Fusional Area Diplopia Diplopia Diplopia Objects that fall close to the horopter are also fused. For these stimuli the retinal disparity falls within Panum’s Fusional Area and the result is stereopsis. For those objects located at greater distances from the horopter the disparity is too great for the images to be fused and the result is physiological diplopia.
- 18. The Neurophysiological Basis of Stereopsis
- 19. The Physiological Basis of Stereopsis There is evidence that stereopsis is coded by neurons in the primary visual cortex (V1). Up to this point in the visual pathway information from each eye is largely segregated. LGN Layers 2, 3, 5 ipsilateral Layers 1, 4 6 contralateral 1 2 & 3 4A 4B 4C{ 5A 5B 6 V1 MAGNO (1 & 2) 1 2 3 4 5 6
- 20. Certain cells in V1 however receive inputs from two eyes and are known as binocular neurons. The pioneering work on the binocularity of cells in the brain was carried out by Hubel & Wiesel in the 1960s. They found that approximately 80% of the neurons in the primary visual cortex of the cat were driven by both eyes. In the monkey approximately 60% of neurons are binocular.
- 21. Ocular dominance distribution of 233 cells from the striate cortex of the cat. Each cell is assigned to an ocular dominance group 1-7 according to the relative response weighting from the two eyes. (Wiesel & Hubel 1963) 0 10 20 30 40 50 60 1 2 3 4 5 6 7 Ocular Dominance No. of Cells Contralateral Equal Ipsilateral
- 22. Binocular neurons may act as disparity detectors and such cells are responsive to stimuli at a specific distance – a simple scheme as to how a binocular neuron might signal disparity is illustrated below: