



















Wheel chair controller using eye
- 2. CONTENTS: 1:Introduction 2:Design overview 3:Software design 4:hardware design 5:Mechanical design 6:Testing and Results 7:conclusions
- 3. INTRODUCTION: Many people are suffering from quadriplegia around the world, which affects their four limbs. So we made a project called eye monitored wheel chair movement which makes their life easy We take the advantage of their ability to move their head. We use laptab webcam to capture their head movements by that the wheel chair can be moved to desired direction.
- 4. DESIGN OVERVIEW: • Eye detection can be done by MATLAB script which is running on the laptab which has inbuilt webcam. • MATLAB puts one digit like 0,1,2 on COM port based on the eye movements • ATMega 32A is used to drive motors as per user desire direction like left,right,straight based on signals send by matlab
- 5. SOFTWARE DESIGN: (A) MATLAB COMPONENT Initialization of COM port for serial communication. Capturing of image for every 25th frame. Changing image from RGB to gray level and enhancing the image. Detection of the person’s eye in image using viola-jones algorithm. Detection of the eye movement by comparing the present position of eye with previous position. Placing one digit data on the COM port based on the eye movements.
- 6. Code developed in AVR studio. Hex file generated using AVR studio. Hex file dumped into Microcontroller using extreme burner software (B) FIRMWARE DESIGN
- 7. HARDWARE DESCRIPTION (A)DESCRIPTION OF MICRO CONTROLLER ATMEGA 32A • ATMega 32A is a 8-bit microcontroller having 40 pins • ATMega 32A has a 32 Programmable I/O Lines • ATMega 32A has a programmable USART • ATMega 32A can operate over 10,000 Flash/100,000 EEPROM Write/Erase cycles.
- 8. MECHANICAL DESIGN WHEEL CHAIR PROTO TYPE Metal Chassis – It is flat metal body which resembles wheel chair DC motors – Two DC motors are used having 200 RPM Wheels – Two types of wheels. One is castor wheel and other is plastic wheel(two wheels)
- 9. HARDWARE IMPLEMENTATION Block diagram of project
- 11. CP2102 CP2102 is a interfacing device between computer and microcontroller CP2102 carry one digit data put on COM port by MATLAB using RS-232 standard It also converts RS-232 voltage levels into TTL voltage levels CP2102 has RXD,TXD,DTR,VBUS,GND,3V3 pins
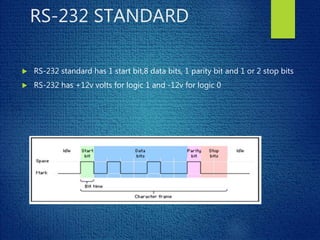
- 12. RS-232 STANDARD RS-232 standard has 1 start bit,8 data bits, 1 parity bit and 1 or 2 stop bits RS-232 has +12v volts for logic 1 and -12v for logic 0
- 13. (B) MICROCONTROLLER – DC MOTORS INTERFACE To interface MCU with motors we use L293D IC. Based on the input data output pins are enabled. Dc motors rotate based on the logic levels at IN1,IN2,IN3,IN4 of L293D
- 14. LOGIC LEVELS AND WHEEL CHAIR DIRECTION h
- 15. TESTING AND RESULTS PROJECT KIT
- 16. Testing strategy – x, y, length, height of valid eye are displayed on the debug screen. Speed of execution – This is the limitation of our project. We can take image for every 15th frame but cannot process at that speed. Accuracy – can get almost 86% accuracy with coordinates of eye that are set in threshold limits
- 17. SAFETY FEATURES Controlled speed of detection and wheel chair drive. Eye height and width threshold. Controlled movement in either direction for limited time period. Less jerk, by incorporating delay in the wheel chair drive. Halt control using blink detection.
- 18. CONCLUSION PERFORMANCE System functions at an accuracy of 70 – 90%. Person’s eye can easily detected by using viola- jones algorithm without detecting of things mostly have face like features. FUTURE MODIFICATIONS • Lot of work needs to be done before making the product commercially viable. • Need to work on wheel chair movement when the person is just casually glaring in different directions. • We can incorporate certain sequences for turning ON and OFF electrical devices or door locks. • Lot of safety precautions need to be incorporated.
- 19. REFERENCES: 1. S. Tameemsultana and N. Kali Saranya, “Implementation of Head and Finger Movement Based Automatic Wheel Chair”, Bonfring International Journal of Power Systems and Integrated Circuits, vol. 1, Special Issue, pp 48-51, December 2011. 2. Manuel Mazo, Francisco J. Rodriguez, Jose L, Lazaro, Jesus Urena, Juan C. Garcia, Enrique Santiso, Pedro Revenga and J. Jesus Garcia, “Wheelchair for Physically Disabled People with Voice, Ultrasonic and Infrared Sensor Control “, Autonomous Robots, vol.2, no. 3, pp. 203-224 ,Sep 1995. 3. Tabasum Shaikh, Naseem Farheen Sayyed, Shaheen Pathan, “Review of Multilevel Controlled Wheelchair”, 4th National Conference On Electronic Technologies, pp. 275- 279, April 2013. 4. Motor Controller circuitry – http:// en.wikipedia.org/wiki/Motor controller 5. Voila Jones Algorithm - http://en.wikipedia.org/wiki/Viola%E2%80%93Jones_object_detection_framework 6. Cascade Object Detector – http://www.mathworks.com/help/vision/ref/vision.cascadeobjectdetector-class.html
- 20. THANK YOU
- 21. ANY QUIRIES ???