XS Oracle 2009 Real Time And Vmm
•
0 likes•1,563 views

Chuck Yoo: Real-time and VMM
Report
Share








































XS Oracle 2009 Real Time And Vmm
- 1. R e a l-tim e a n d V M M -R e a l-tim e X e n fo r E m b e d d e d D e v ic e s C h u c k Y o o a n d te a m O p e r a tin g S y s te m s L a b o r a to r y K o r e a U n iv e r s ity F e b . 25, 2009
- 2. C o n te n ts • M o tiv a tio n • B a c k g ro u n d – T w o k e y p r o p e r tie s in r e a l-tim e s y s te m s • C h a lle n g e s to X e n – d e te r m in is m – p r e d ic ta b ility • D e v e lo p m e n t s ta tu s 2
- 3. M o tiv a tio n s w h y r e a l-tim e s u p p o r t is im p o r ta n t • V a r io u s fo r m s o f n e w e m b e d d e d s y s te m s – R e a l-tim e r e q u ir e m e n t • M o b ile p h o n e to r u n b o th : – C o m m u n ic a tio n s ta c k lik e G S M , C D M A – A p p lic a tio n s lik e U I, g a m e s • A u to m o b ile s , R o b o ts , U A V , a n d m o r e 3
- 4. D e te r m in is m in R e a l-tim e S y s te m • S c h e d u la b ility – T h e o r e tic a l fo u n d a tio n – T a s k T i = (p i, c i, d i), e x e c u tio n c i tim e w ith in a d e a d lin e d i, d u r in g e a c h p e r io d p i – S c h e d u la b ility c a n b e d e c id e d fo r a g iv e n s c h e d u lin g p o lic y a n d a r e a l-tim e ta s k s e t • R e a l-tim e o p e r a tin g s y s te m p e r fo r m s s c h e d u la b ility te s t w h e n e v e r th e ta s k s e t o r th e s c h e d u lin g p o lic y is c h a n g e d – P e r fo r m s a d m is s io n c o n tr o l s o th a t a ll th e ta s k in th e s y s te m c a n m e e t th e e x e c u tio n c o n d itio n – In o r d e r to s im p lify th e s c h e d u la b ility a n a ly s is a t r u n -tim e , it fix e s th e ta s k s e t a n d u tiliz a tio n a p r io r i. 4
- 5. S c h e d u la b ility T e s t • F o r a g iv e n T a s k s e t T = {T i (p i , c i , d i )} a n d A lg o r ith m A , s c h e d u le r S c h e c k s w h e th e r a ll th e ta s k s in th e s y s te m m e e t th e e x e c u tio n c o n d itio n • T is R M -s c h e d u la b le if a n d o n ly if ሺ wi tሻ≤ t pi , where t = kpj , j = 1,2, … , i, k = 1, … , , pj t i wi ሺtሻ= ck , 0 < t < pi . pk k=1 • T is E D F -s c h e d u la b le if a n d o n ly if ci n U= ൬b ≤ 1 . pi i=1 5
- 6. P r e d ic ta b ility in R e a l-tim e S y s te m • In te r r u p t is a k e y o b s ta c le to p r e d ic ta b ility – In te r r u p t is a s y n c h r o n o u s a n d u n -d e te r m in is tic – F o r p r e d ic ta b ility , n e e d to m a k e in te r r u p t p r o c e s s in g p r e d ic ta b le • R e a l-tim e o p e r a tin g s y s te m a d o p ts m e c h a n is m s to m a k e it tim e -b o u n d e d – D is a b le a n o th e r in te r r u p t – N e s te d /p r io r itiz e in te r r u p t – P o llin g I/O – D e fe r r e d (D e la y e d ) p r o c e s s in g • e .g .) b o tto m h a lf, s o ftir q , e tc . 6
- 7. X e n : P h y s ic a l tim e != V ir tu a l tim e (2 4 fr m /s ) (1 2 fr m /s ) M e d ia p la y e r M e d ia p la y e r S c h e d u lin g o v e r S c h e d u lin g o v e r != p h y s ic a l m a c h in e p h y s ic a l m a c h in e P h y s ic a l M a c h in e V ir tu a l M a c h in e V M 1 PM1 P h y s ic a l tim e V ir tu a l t im e P h y s ic a l M a c h in e D is c r e te D is c r e te s y s te m s y s te m P h y s ic a l tim e tim e tim e in P M 1 in V M 1 N o t d e fin e d 7 P h y s ic a l tim e P h y s ic a l tim e
- 8. X e n : I/O m o d e l • D o e s n o t p r o v id e p r e d ic ta b le tim e -b o u n d • S p lit d r iv e r m o d e l is n o t s u ita b le fo r r e a l- tim e I/O 8
- 9. V M M fo r E m b e d d e d S y s te m s • X e n -A R M fr o m S a m s u n g E le c . (f ir s t A R M p o r tin g ) • L 4 fr o m O p e n K e r n e l L a b s (m ic r o k e r n e l-b a s e d v ir tu a liz a tio n ) • V L X fr o m V ir tu a lL o g ix (r e a l-tim e s u p p o r t R T O S r u n s in s id e th e V M M ) S im ila r is s u e s in h e r ite d ! 9
- 10. C h a lle n g e to X e n HOW TO PR OVIDE DE TER MINIS M? 10
- 11. S c h e d u lin g in X e n • S E D F , C r e d it s c h e d u le r s – S im p le E D F im p le m e n ts r e a l-tim e E D F s c h e d u le r • U s e r s h o u ld d e fin e p e r io d , e x e c u tio n s lic e – C r e d it s c h e d u le r im p le m e n ts c r e d it b a s e d fa ir s c h e d u lin g w ith I/O b o o s t • S u p p o r ts m u lti-p r o c e s s o r , lo a d b a la n c in g • I/O B O O S T p r io r ity to k e e p r e s p o n s iv e n e s s • T im e k e e p in g in X e n – T im e r in te r r u p ts a r e d is tr ib u te d o v e r V M s • H a r d w a r e tim e r in te r r u p ts a r e h a n d le d b y th e X e n , a n d d e liv e r e d b y v ia e v e n t c h a n n e l • V M c a n b e a w a r e o f tim e p a s s a g e b y v ir tu a l t im e r in te r r u p t w h ic h h a s b e e n s e n t b y th e X e n – T im e flo w s o n ly w h e n th e g u e s t O S is s c h e d u le d b y th e V M M 11
- 12. H o w to P e r fo r m S c h e d u la b ility A n a ly s is ? • P r o b le m – T a s k s c h e d u lin g s h o u ld b e p e r fo r m e d b y R T O S • I t p e r fo r m s s c h e d u la b ilit y t e s t, R T s c h e d u lin g p o lic y • X e n d o e s n o t k n o w t h e t a s k s in th e R T O S – H o w e v e r , R T g u e s t is n o t a w a r e o f th e p h y s ic a l tim e • R T O S is a w a r e o f t h e v ir t u a l tim e p r o v id e d b y t h e X e n • D e a d lin e m ig h t b e m is s e d if t h e X e n d o e s n o t t im e ly s c h e d u le R T g u e s t R T guest is not aware of this time V ir tu a l tim e R T V ir tu a l M a c h in e V M 1 V ir tu a l M a c h in e V M 2 Performs schedulability test V ir tu a l tim e r in t e r r u p t Xen P h y s ic a l tim e P h y s ic a l 12 d e a d lin e
- 13. S o lu tio n 1 - In te g r a te d s c h e d u lin g a t V M M • S c h e d u lin g a t th e lo w e s t la y e r – At VMM ? • V M M s h o u ld b e a w a r e o f a ll th e r e a l-tim e ta s k s in R T g u e s t OS – e .g .) L 4 ta s k s c h e d u lin g • W h a t if m u ltip le R T g u e s t O S – In a d d itio n , • H o w to s u p p o r t G P O S – S c h e d u lin g a n a ly s is w h e n e v e r G P O S c r e a te s a u s e r p r o c e s s – S o r tin g a ll th e ta s k s in a ll th e g u e s ts fo r S E D F a t r u n tim e s h o u ld h a v e a c o n s id e r a b le o v e r h e a d • In te r fe r e G P O S s c h e d u le r – L o c a l s c h e d u le r k n o w s a b e s t w a y to u tiliz e th e r e s o u r c e s 13
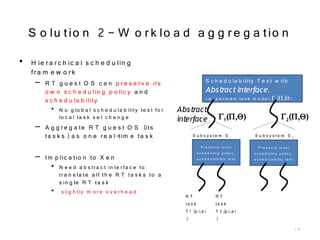
- 14. S o lu tio n 2 - W o r k lo a d a g g r e g a tio n • H ie r a r c h ic a l s c h e d u lin g fr a m e w o r k – R T g u e s t O S c a n p r e s e r v e its S c h e d u la b ility T e s t w ith Abstract interface, o w n s c h e d u lin g p o lic y a n d i.e . p e r io d ic ta s k m o d e l Γi (Π,Θ) s c h e d u la b ility • N o g lo b a l s c h e d u la b ility te s t fo r Abstract Γ1(Π,Θ) Γ2(Π,Θ) lo c a l ta s k s e t c h a n g e interface – A g g r e g a te R T g u e s t O S (its ta s k s ) a s o n e r e a l-tim e ta s k S u b s y s te m S 1 S u b s y s te m S 2 P r e s e r v e lo c a l P r e s e r v e lo c a l s c h e d u lin g p o lic y , – Im p lic a tio n to X e n s c h e d u lin g p o lic y , s c h e d u la b ility te s t s c h e d u la b ility te s t • N e e d a b s tr a c t in te r fa c e to tr a n s la t e a ll th e R T t a s k s to a s in g le R T ta s k • s lig h tly m o r e o v e r h e a d RT RT ta s k ta s k T 1 (p i,e i T 2 (p i,e i ) ) 14
- 15. A g g r e g a tio n P e r io d ic r e s o u r c e m o d e l • k = m a x ( ┌ (t-(Π-Θ)) ┐/ Π, 1 ) – n u m b e r o f p e r io d s w ith in t – i.e . k = 3 fo r th e fig u r e b e lo w t Π Π-Θ kΠ-Θ kΠ Θ Θ Θ 15
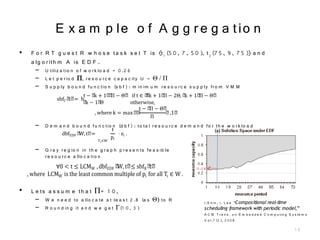
- 16. E x a m p le o f A g g r e g a tio n • F o r R T g u e s t R w h o s e ta s k s e t T is {t 1 (5 0 , 7 , 5 0 ), t 2 (7 5 , 9 , 7 5 )} a n d a lg o r ith m A is E D F . – U tiliz a tio n o f w o r k lo a d = 0 .2 6 – L e t p e r io d Π, r e s o u r c e c a p a c ity U = Θ / Π t − ሺ + 1ሻ Π − Θሻ if t ∈ ሾ k + 1ሻ − 2Θ, ሺ + 1ሻ − Θሿ ሺ ሺ k Π k Π – S u p p ly b o u n d fu n c tio n (s b f) : m in im u m r e s o u r c e s u p p ly fr o m V M M sbfΓ ሺ ሻ= b t ሺ − 1ሻ k Θ otherwise, t − ሺ − Θሻ Π , where k = max ቆቜ ቝ ,1ቇ Π t dbfEDF ሺ tሻ= W, ⋅ ei . – D e m a n d b o u n d fu n c tio n (d b f) : to ta l r e s o u r c e d e m a n d fo r t h e w o r k lo a d pi T i ∈W – G r a y r e g io n in th e g r a p h p r e s e n ts fe a s ib le ∀0 < t ≤ LCMW , dbfEDF ሺ tሻ≤ sbfR ሺ ሻ W, t r e s o u r c e a llo c a tio n , where LCMW is the least common multiple of pi for all Ti ∈ W . 0 .2 8 L e ts a s s u m e t h a t Π= 1 0 , • – W e n e e d to a llo c a te a t le a s t 2 .8 (a s Θ) to R I.S h in , I . L e e “C ompositional real-time – R o u n d in g it a n d w e g e t Γ(1 0 , 3 ) scheduling framework with periodic model,” A C M T r a n s . o n E m b e d d e d C o m p u tin g S y s te m s V o l.7 (3 ), 2 0 0 8 16
- 17. T o m a k e a g g r e g a tio n w o r k • T o in c o r p o r a te th e h ie r a r c h ic a l s c h e d u lin g fr a m e w o r k – N e e d a to o l to c a lc u la te w ith th e g iv e n ta s k s e t • R e s o u r c e s u p p ly b o u n d >= R e s o u r c e d e m a n d bound – X e n s h o u ld p r o v id e e n o u g h r e s o u r c e s to R T O S • R T O S c a lc u la te s d e m a n d b o u n d (to ta l r e s o u r c e d e m a n d to m e e t th e s c h e d u la b ility ) • X e n p r o v id e s C P U r e s o u r c e to R T O S a t le a s t to r e s o u r c e s u p p ly b o u n d (m in im u m r e s o u r c e s u p p ly fo r a c o r r e s p o n d in g s c h e d u lin g p o lic y ) 17
- 18. C h a lle n g e to X e n HOW TO DEAL WITH PR EDIC TABILITY? 18
- 19. H o w to H a n d le In te r r u p ts in T im e - b o u n d e d fa s h io n ? • P r o b le m – X e n ’s d o m a in m o d e l s p lits p h y s ic a l I/O p r o c e s s in g fr o m v ir tu a l D om 0 RT- m a c h in e Dom U (physical Dom U driver) • A d d itio n a l la te n c y • U n b o u n d e d -p r o c e s s in g 1. Asynch. 2. VM tim e Inter-VM comm. S cheduling – D om 0 m ay be kept busy (n o t-tim e b o u n d e d ) Xen i.e . ta r g e t g u e s t m a y n o t b e s c h e d u le d im m e d ia te ly 19
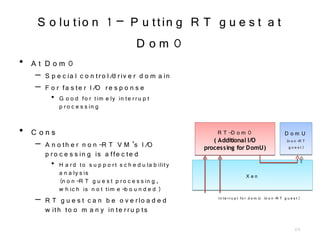
- 20. S o lu tio n 1 – P u ttin g R T g u e s t a t Dom 0 • At Dom 0 – S p e c ia l c o n tr o l/d r iv e r d o m a in – F o r fa s te r I/O r e s p o n s e • G o o d fo r tim e ly in te r r u p t p r o c e s s in g • Cons R T -D o m 0 Dom U ( Additional I/O – A n o th e r n o n -R T V M ’s I/O (n o n -R T processing for DomU) g u e s t) p r o c e s s in g is a ffe c te d • H a r d to s u p p o r t s c h e d u la b ility a n a ly s is Xen (n o n -R T g u e s t p r o c e s s in g , w h ic h is n o t tim e -b o u n d e d ) – R T g u e s t c a n b e o v e r lo a d e d In te r r u p t fo r d o m U (n o n -R T g u e s t ) w ith to o m a n y in te r r u p ts 20
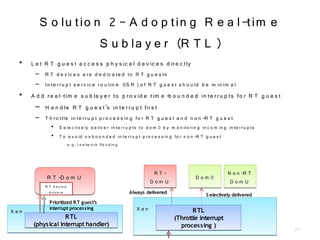
- 21. S o lu tio n 2 - A d o p tin g R e a l-tim e S u b la y e r (R T L ) • L e t R T g u e s t a c c e s s p h y s ic a l d e v ic e s d ir e c t ly – R T d e v ic e s a r e d e d ic a te d to R T g u e s ts – In te r r u p t s e r v ic e r o u tin e (IS R ) o f R T g u e s t s h o u ld b e m in im a l • A d d r e a l-t im e s u b la y e r to p r o v id e t im e -b o u n d e d in te r r u p ts fo r R T g u e s t – H a n d le R T g u e s t’s in te r r u p t fir s t – T h r o ttle in te r r u p t p r o c e s s in g fo r R T g u e s t a n d n o n -R T g u e s t • S e le c t iv e ly d e liv e r in te r r u p ts to d o m 0 b y m o n ito r in g in c o m in g in te r r u p ts • T o a v o id u n b o u n d e d in t e r r u p t p r o c e s s in g fo r n o n -R T g u e s t e .g .) n e tw o r k flo o d in g RT- N o n -R T R T -D o m U Dom 0 Dom U Dom U R T d e v ic e Always delivered d r iv e r s S electively delivered Prioritized R T guest’s interrupt processing Xen R TL Xen R TL (Throttle interrupt (physical interrupt handler) processing ) 21
- 22. M o re o n R T L • R T L c o n tr o ls th e in c o m in g r a te o f th e a g g r e s s iv e in te r r u p ts – d is c a r d in te r r u p ts w h e n to o m a n y if c u r r e n t in te r r u p t in c o m in g r a te > m a x im u m in te r r u p t r a te th r e s h o ld • M a x . in te r r u p t r a te c o u ld b e d e r iv e d fr o m a v a ila b le c p u b a n d w id th fr o m s c h e d u la b ility a n a ly s is 22
- 23. D e v e lo p m e n t s ta tu s • P o r te d u C /O S -II o v e r X e n A R M p la tfo r m – F r e e s c a le iM X 2 1 • B e in g im p le m e n te d – H ie r a r c h ic a l s c h e d u le r – T o o ls fo r s c h e d u la b ility a n a ly s is –RTL • P r e v ie w a t h ttp ://w w w .y o u tu b e .c o m /w a tc h ?v = V li9 z b 6 2 C e 23
- 24. C o n c lu s io n • R e a l-tim e s u p p o r t is im p o r ta n t • X e n c a n d o it 24
- 25. THANKS ! 25
- 26. R e a l-tim e a n d V M M -R e a l-tim e X e n fo r E m b e d d e d D e v ic e s C h u c k Y o o a n d te a m O p e r a tin g S y s te m s L a b o r a to r y K o r e a U n iv e r s ity F e b . 25, 2009 0 2 /2 5 /0 9 1
- 27. C o n te n ts • M o tiv a tio n • B a c k g ro u n d – T w o k e y p r o p e r tie s in r e a l-tim e s y s te m s • C h a lle n g e s to X e n – d e te r m in is m – p r e d ic ta b ility • D e v e lo p m e n t s ta tu s 0 2 /2 5 /0 9 2
- 28. M o tiv a tio n s w h y r e a l-tim e s u p p o r t is im p o r ta n t • V a r io u s fo r m s o f n e w e m b e d d e d s y s te m s – R e a l-tim e r e q u ir e m e n t • M o b ile p h o n e to r u n b o th : – C o m m u n ic a tio n s ta c k lik e G S M , C D M A – A p p lic a tio n s lik e U I, g a m e s • A u to m o b ile s , R o b o ts , U A V , a n d m o r e 0 2 /2 5 /0 9 3
- 29. D e te r m in is m in R e a l-tim e S y s te m • S c h e d u la b ility – T h e o r e tic a l fo u n d a tio n – T a s k T i = (p i, c i, d i), e x e c u tio n c i tim e w ith in a d e a d lin e d i, d u r in g e a c h p e r io d p i – S c h e d u la b ility c a n b e d e c id e d fo r a g iv e n s c h e d u lin g p o lic y a n d a r e a l-tim e ta s k s e t • R e a l-tim e o p e r a tin g s y s te m p e r fo r m s s c h e d u la b ility te s t w h e n e v e r th e ta s k s e t o r th e s c h e d u lin g p o lic y is c h a n g e d – P e r fo r m s a d m is s io n c o n tr o l s o th a t a ll th e ta s k in th e s y s te m c a n m e e t th e e x e c u tio n c o n d itio n – In o r d e r to s im p lify th e s c h e d u la b ility a n a ly s is a t r u n -tim e , it fix e s th e ta s k s e t a n d u tiliz a tio n a p r io r i. 0 2 /2 5 /0 9 4 4
- 30. S c h e d u la b ility T e s t • F o r a g iv e n T a s k s e t T = {T i (p i , c i , d i )} a n d A lg o r ith m A , s c h e d u le r S c h e c k s w h e th e r a ll th e ta s k s in th e s y s te m m e e t th e e x e c u tio n c o n d itio n • T is R M -s c h e d u la b le if a n d o n ly if ሺ wi tሻ≤ t pi , where t = kpj , j = 1,2, … , i, k = 1, … , , pj t i wi ሺtሻ= ck , 0 < t < pi . pk k=1 • T is E D F -s c h e d u la b le if a n d o n ly if ci n U= ൬b ≤ 1 . pi i=1 0 2 /2 5 /0 9 5
- 31. P r e d ic ta b ility in R e a l-tim e S y s te m • In te r r u p t is a k e y o b s ta c le to p r e d ic ta b ility – I n te r r u p t is a s y n c h r o n o u s a n d u n -d e t e r m in is t ic – F o r p r e d ic ta b ility , n e e d to m a k e in te r r u p t p r o c e s s in g p r e d ic ta b le • R e a l-tim e o p e r a tin g s y s te m a d o p ts m e c h a n is m s to m a k e it tim e -b o u n d e d – D is a b le a n o th e r in te r r u p t – N e s t e d /p r io r itiz e in t e r r u p t – P o llin g I /O – D e fe r r e d (D e la y e d ) p r o c e s s in g • e .g .) b o tto m h a lf, s o ftir q , e tc . 0 2 /2 5 /0 9 6
- 32. X e n : P h y s ic a l tim e != V ir tu a l tim e (2 4 f r m /s ) (1 2 f r m /s ) M e d ia p la y e r M e d ia p la y e r S c h e d u lin g o v e r S c h e d u lin g o v e r != p h y s ic a l m a c h in e p h y s ic a l m a c h in e P h y s ic a l M a c h in e V ir t u a l M a c h in e V M 1 PM1 P h y s ic a l t im e V ir tu a l tim e P h y s ic a l M a c h in e D is c r e t e D is c r e t e s y s te m s y s te m P h y s ic a l t im e tim e tim e in P M 1 in V M 1 N o t d e fin e d 0 2 /2 5 /0 9 7 P h y s ic a l t im e P h y s ic a l t im e 7
- 33. X e n : I/O m o d e l • D o e s n o t p r o v id e p r e d ic ta b le tim e -b o u n d • S p lit d r iv e r m o d e l is n o t s u ita b le fo r r e a l- tim e I/O 0 2 /2 5 /0 9 8
- 34. V M M fo r E m b e d d e d S y s te m s • X e n -A R M fr o m S a m s u n g E le c . (fir s t A R M p o r tin g ) • L 4 fr o m O p e n K e r n e l L a b s (m ic r o k e r n e l-b a s e d v ir tu a liz a tio n ) • V L X fr o m V ir tu a lL o g ix (r e a l-tim e s u p p o r t R T O S r u n s in s id e th e V M M ) S im ila r is s u e s in h e r ite d ! 0 2 /2 5 /0 9 9
- 35. C h a lle n g e to X e n HOW TO PR OVIDE DETE R MINIS M? 0 2 /2 5 /0 9 10
- 36. S c h e d u lin g in X e n • S E D F , C r e d it s c h e d u le r s – S im p le E D F im p le m e n ts r e a l-tim e E D F s c h e d u le r • U s e r s h o u ld d e fin e p e r io d , e x e c u tio n s lic e – C r e d it s c h e d u le r im p le m e n ts c r e d it b a s e d fa ir s c h e d u lin g w ith I/O b o o s t • S u p p o r ts m u lti-p r o c e s s o r , lo a d b a la n c in g • I/O B O O S T p r io r ity to k e e p r e s p o n s iv e n e s s • T im e k e e p in g in X e n – T im e r in te r r u p ts a r e d is tr ib u t e d o v e r V M s • H a r d w a r e tim e r in te r r u p ts a r e h a n d le d b y th e X e n , a n d d e liv e r e d b y v ia e v e n t c h a n n e l • V M c a n b e a w a r e o f tim e p a s s a g e b y v ir tu a l tim e r in te r r u p t w h ic h h a s b e e n s e n t b y th e X e n – T im e flo w s o n ly w h e n th e g u e s t O S is s c h e d u le d b y th e V M M 0 2 /2 5 /0 9 11
- 37. H o w to P e r fo r m S c h e d u la b ility A n a ly s is ? • P r o b le m – T a s k s c h e d u lin g s h o u ld b e p e r f o r m e d b y R T O S • It p e r f o r m s s c h e d u la b ilit y te s t , R T s c h e d u lin g p o lic y • X e n d o e s n o t k n o w t h e t a s k s in th e R T O S – H o w e v e r , R T g u e s t is n o t a w a r e o f th e p h y s ic a l tim e • R T O S is a w a r e o f th e v ir tu a l tim e p r o v id e d b y t h e X e n • D e a d lin e m ig h t b e m is s e d if th e X e n d o e s n o t t im e ly s c h e d u le R T g u e s t R T guest is not aware of this time V ir tu a l t im e R T V ir tu a l M a c h in e V M 1 V ir tu a l M a c h in e V M 2 Performs schedulability test V ir tu a l t im e r in t e r r u p t Xen P h y s ic a l tim e P h y s ic a l 0 2 /2 5 /0 9 12 d e a d lin e
- 38. S o lu tio n 1 - In te g r a te d s c h e d u lin g a t V M M • S c h e d u lin g a t th e lo w e s t la y e r – At VM M ? • V M M s h o u ld b e a w a r e o f a ll th e r e a l-tim e ta s k s in R T g u e s t OS – e .g .) L 4 ta s k s c h e d u lin g • W h a t if m u ltip le R T g u e s t O S – I n a d d it io n , • H o w to s u p p o r t G P O S – S c h e d u lin g a n a ly s is w h e n e v e r G P O S c r e a te s a u s e r p r o c e s s – S o r tin g a ll th e ta s k s in a ll th e g u e s ts fo r S E D F a t r u n tim e s h o u ld h a v e a c o n s id e r a b le o v e r h e a d • In te r fe r e G P O S s c h e d u le r – L o c a l s c h e d u le r k n o w s a b e s t w a y to u tiliz e th e r e s o u r c e s 0 2 /2 5 /0 9 13
- 39. S o lu tio n 2 - W o r k lo a d a g g r e g a tio n • H ie r a r c h ic a l s c h e d u lin g fr a m e w o r k – R T g u e s t O S c a n p r e s e r v e its S c h e d u la b ility T e s t w it h Abstract interface, o w n s c h e d u lin g p o lic y a n d i.e . p e r io d ic ta s k m o d e l Γi (Π,Θ) s c h e d u la b ility • N o g lo b a l s c h e d u la b ility te s t fo r Abs tract Γ1(Π,Θ) Γ2(Π,Θ) lo c a l ta s k s e t c h a n g e interface – A g g r e g a te R T g u e s t O S (its ta s k s ) a s o n e r e a l-tim e ta s k S u b s y s te m S 1 S u b s y s te m S 2 P r e s e r v e lo c a l P r e s e r v e lo c a l s c h e d u lin g p o lic y , – Im p lic a tio n to X e n s c h e d u lin g p o lic y , s c h e d u la b ilit y t e s t s c h e d u la b ilit y t e s t • N e e d a b s tr a c t in te r fa c e to tr a n s la te a ll th e R T ta s k s to a s in g le R T ta s k • s lig h tly m o r e o v e r h e a d RT RT ta s k ta s k T 1 (p i,e i T 2 (p i,e i ) ) 0 2 /2 5 /0 9 14
- 40. A g g r e g a tio n P e r io d ic r e s o u r c e m o d e l • k = m a x ( ┌ (t-(Π-Θ)) ┐/ Π, 1 ) – n u m b e r o f p e r io d s w ith in t – i.e . k = 3 fo r th e f ig u r e b e lo w t Π Π-Θ kΠ-Θ kΠ Θ Θ Θ 0 2 /2 5 /0 9 15
- 41. E x a m p le o f A g g r e g a tio n • F o r R T g u e s t R w h o s e ta s k s e t T is {t 1 (5 0 , 7 , 5 0 ), t 2 (7 5 , 9 , 7 5 )} a n d a lg o r ith m A is E D F . – U tiliz a t io n o f w o r k lo a d = 0 .2 6 – L e t p e r io d Π, r e s o u r c e c a p a c ity U = Θ / Π t − ሺ + 1ሻ Π − Θሻ if t ∈ ሾ k + 1ሻ − 2Θ, ሺ + 1ሻ − Θሿ ሺ ሺ k Π k Π – S u p p ly b o u n d fu n c tio n (s b f) : m in im u m r e s o u r c e s u p p ly fr o m V M M sbfΓ ሺtሻ= b ሺ − 1ሻ k Θ otherwise, t − ሺ − Θሻ Π , where k = max ቆቜ ቝ ,1ቇ Π t dbfEDF ሺ tሻ= W, ⋅ ei . – D e m a n d b o u n d f u n c t io n (d b f ) : to ta l r e s o u r c e d e m a n d f o r t h e w o r k lo a d pi T i ∈W – G r a y r e g io n in t h e g r a p h p r e s e n t s fe a s ib le ∀0 < t ≤ LCMW , dbfEDF ሺ tሻ≤ sbfR ሺ W, tሻ r e s o u r c e a llo c a t io n , where LCMW is the least common multiple of pi for all Ti ∈ W . 0 .2 8 L e ts a s s u m e th a t Π= 1 0 , • – W e n e e d t o a llo c a t e a t le a s t 2 .8 (a s Θ) to R I .S h in , I . L e e “C ompos itional real-time – R o u n d in g it a n d w e g e t Γ(1 0 , 3 ) s cheduling framework with periodic model,” A C M T r a n s . o n E m b e d d e d C o m p u t in g S y s t e m s V o l.7 (3 ), 2 0 0 8 0 2 /2 5 /0 9 16
- 42. T o m a k e a g g r e g a tio n w o r k • T o in c o r p o r a te th e h ie r a r c h ic a l s c h e d u lin g fr a m e w o r k – N e e d a to o l t o c a lc u la t e w ith t h e g iv e n ta s k s e t • R e s o u r c e s u p p ly b o u n d >= R e s o u r c e d e m a n d bound – X e n s h o u ld p r o v id e e n o u g h r e s o u r c e s to R T O S • R T O S c a lc u la te s d e m a n d b o u n d (to ta l r e s o u r c e d e m a n d to m e e t th e s c h e d u la b ility ) • X e n p r o v id e s C P U r e s o u r c e to R T O S a t le a s t to r e s o u r c e s u p p ly b o u n d (m in im u m r e s o u r c e s u p p ly fo r a c o r r e s p o n d in g s c h e d u lin g p o lic y ) 0 2 /2 5 /0 9 17
- 43. C h a lle n g e to X e n HOW TO DE AL WITH PR E DIC TABILITY? 0 2 /2 5 /0 9 18
- 44. H o w to H a n d le In te r r u p ts in T im e - b o u n d e d fa s h io n ? • P r o b le m – X e n ’s d o m a in m o d e l s p lits p h y s ic a l I/O p r o c e s s in g fr o m v ir tu a l Dom 0 RT- m a c h in e Dom U (physical Dom U driver) • A d d itio n a l la te n c y • U n b o u n d e d -p r o c e s s in g 1. Asynch. 2. VM tim e Inter-VM comm. S cheduling – D om 0 m ay be kept busy (n o t -t im e b o u n d e d ) Xen i.e . ta r g e t g u e s t m a y n o t b e s c h e d u le d im m e d ia te ly 0 2 /2 5 /0 9 19
- 45. S o lu tio n 1 – P u ttin g R T g u e s t a t D om 0 • At D om 0 – S p e c ia l c o n t r o l/d r iv e r d o m a in – F o r fa s t e r I/O r e s p o n s e • G o o d fo r tim e ly in te r r u p t p r o c e s s in g • Cons R T -D o m 0 Dom U ( Additional I/O – A n o th e r n o n -R T V M ’s I/O (n o n -R T processing for DomU) g u e s t) p r o c e s s in g is a ffe c t e d • H a r d to s u p p o r t s c h e d u la b ility a n a ly s is Xen (n o n -R T g u e s t p r o c e s s in g , w h ic h is n o t tim e -b o u n d e d ) – R T g u e s t c a n b e o v e r lo a d e d In te r r u p t fo r d o m U (n o n -R T g u e s t) w ith to o m a n y in te r r u p ts 0 2 /2 5 /0 9 20
- 46. S o lu tio n 2 - A d o p tin g R e a l-tim e S u b la y e r (R T L ) • L e t R T g u e s t a c c e s s p h y s ic a l d e v ic e s d ir e c t ly – R T d e v ic e s a r e d e d ic a te d to R T g u e s ts – In te r r u p t s e r v ic e r o u tin e (IS R ) o f R T g u e s t s h o u ld b e m in im a l • A d d r e a l-tim e s u b la y e r to p r o v id e tim e -b o u n d e d in te r r u p ts fo r R T g u e s t – H a n d le R T g u e s t’s in te r r u p t fir s t – T h r o ttle in te r r u p t p r o c e s s in g fo r R T g u e s t a n d n o n -R T g u e s t • S e le c t iv e ly d e liv e r in te r r u p t s t o d o m 0 b y m o n ito r in g in c o m in g in te r r u p t s • T o a v o id u n b o u n d e d in te r r u p t p r o c e s s in g fo r n o n -R T g u e s t e .g .) n e tw o r k flo o d in g RT- N o n -R T R T -D o m U D om 0 Dom U Dom U R T d e v ic e Always delivered d r iv e r s S electively delivered Prioritized R T guest’s interrupt processing Xen R TL Xen R TL (Throttle interrupt (physical interrupt handler) processing ) 0 2 /2 5 /0 9 21
- 47. M o re o n R T L • R T L c o n tr o ls th e in c o m in g r a te o f th e a g g r e s s iv e in te r r u p ts – d is c a r d in te r r u p t s w h e n t o o m a n y if c u r r e n t in te r r u p t in c o m in g r a te > m a x im u m in te r r u p t r a te th r e s h o ld • M a x . in te r r u p t r a te c o u ld b e d e r iv e d f r o m a v a ila b le c p u b a n d w id th fr o m s c h e d u la b ilit y a n a ly s is 0 2 /2 5 /0 9 22
- 48. D e v e lo p m e n t s ta tu s • P o r te d u C /O S -II o v e r X e n A R M p la tfo r m – F r e e s c a le iM X 2 1 • B e in g im p le m e n te d – H ie r a r c h ic a l s c h e d u le r – T o o ls fo r s c h e d u la b ility a n a ly s is –RTL • P r e v ie w a t h ttp ://w w w .y o u tu b e .c o m /w a tc h ?v = V li9 z b 6 2 C e o 0 2 /2 5 /0 9 23
- 49. C o n c lu s io n • R e a l-tim e s u p p o r t is im p o r ta n t • X e n c a n d o it 0 2 /2 5 /0 9 24
- 50. THANKS ! 0 2 /2 5 /0 9 25