
SwarmL: A Language for Programming Fully Distributed Intelligent Building Systems
 , , and
, , and
Abstract
:1. Introduction
- (1)
- An entire language system is introduced for SwarmL. The language model, overall framework, and abstract syntax of SwarmL are established to abstractly define and map building entity objects, physical fields, and their dynamic interaction relations into basic data types, variables, and parallel operators, making buildings direct programming objects. By defining an innovative field-oriented variable that depicts the spatially distributed physical field of a building and the computational scope that dynamically specifies the object set of node interactions, SwarmL endogenously describes parallel FDIBS control tasks in a manner consistent with human serial thinking and supports the generalized development of FDIBS APPs, thus effectively reducing the programming difficulty.
- (2)
- The key implementation mechanisms of SwarmL are determined, and an integrated development tool is established. Based on field-oriented variables and the computational scope, SwarmL enables the intuitive programming of universal parallel tasks such as global synchronous diffusion and global computing in FDIBSs, thus separating the computational logic of applications from the node interaction logic and shielding the complex communication details involved in the interaction process. Furthermore, the SwarmL editor and compiler are integrated by implementing a visual development tool for SwarmL to support program editing and object code generation functions.
- (3)
- Experiments are conducted to evaluate the descriptive capability, effectiveness, and efficiency of SwarmL. SwarmL is applied to develop control APPs for a variable air volume (VAV) air conditioning system in an FDIBS. The experimental results in the actual scenario verify that the APP developed by SwarmL can successfully run on the selected building platform. Additionally, the results of a subject-based empirical evaluation show that SwarmL is more efficient than the existing APP development methods. Furthermore, SwarmL is a good example and provides a reference for developing swarm intelligence systems with centerless and node interaction features.
2. Related Work
3. Motivation and Research Challenges
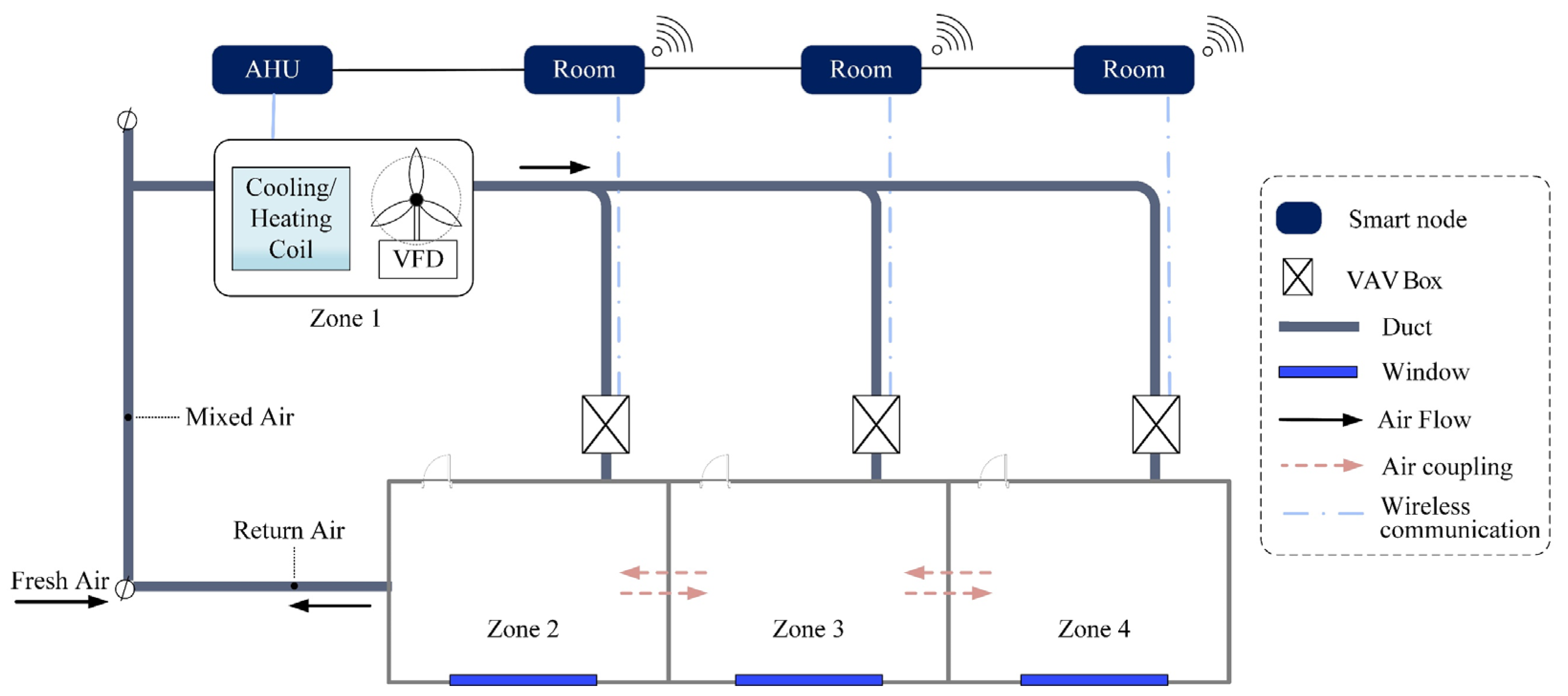
3.1. Motivating Example
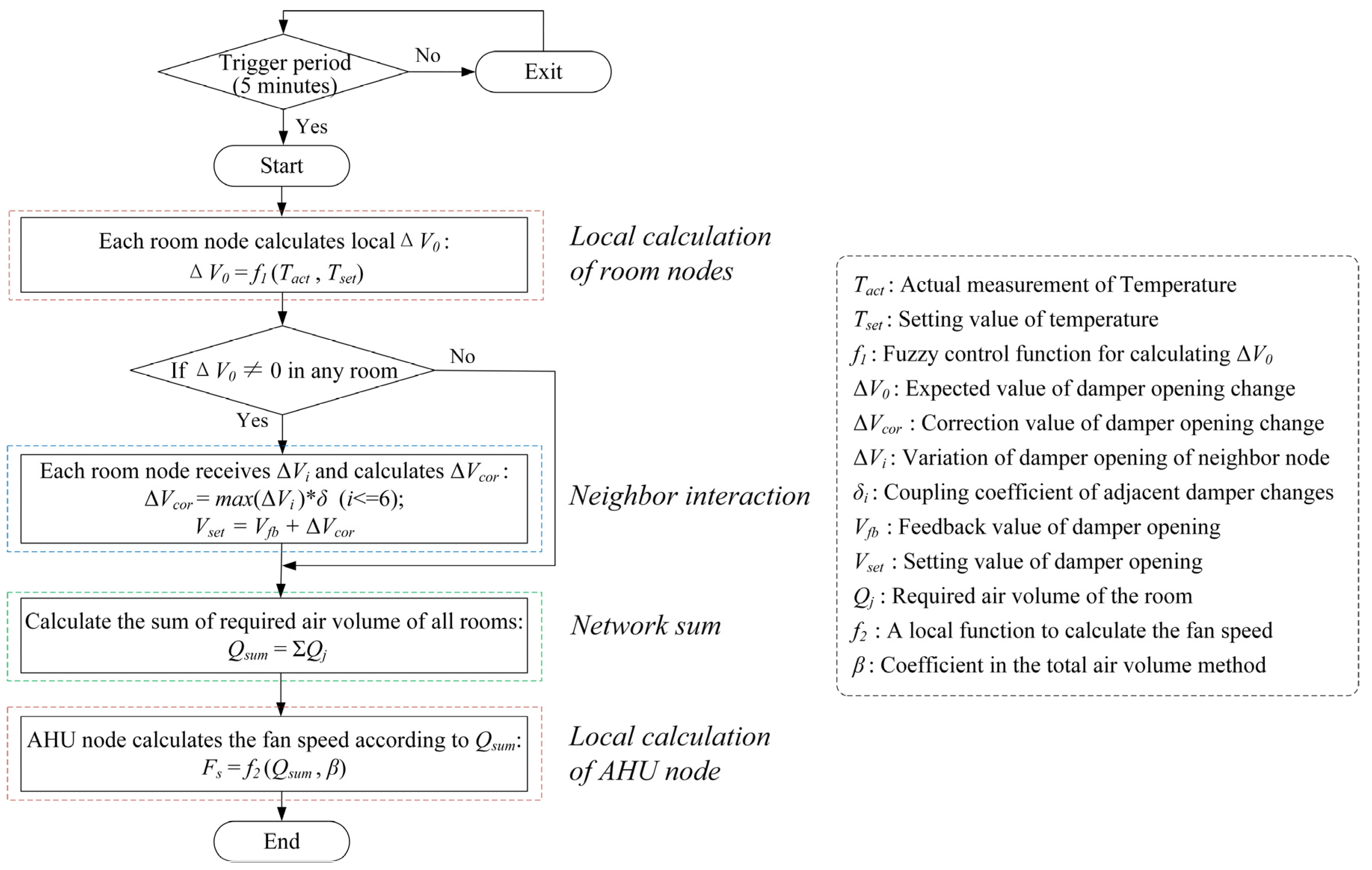
- (1)
- The range of nodes participating in the calculations varies. The nodes participating in Step 3 include the AHU and all room nodes, while Step 2 only includes all room nodes.
- (2)
- The types of starting nodes in the two steps are different. In Step 2, any room node whose ΔV0 is not equal to 0 can trigger the calculation, i.e., the starting node is not fixed. In Step 3, the starting node must be an AHU node because only the starting node can obtain the result of the network summation.
- (3)
- The interaction objects of the nodes are different. In Step 2, the room nodes interact with all logical neighbors in the network topology of the VAV system. In Step 3, the nodes determine different interaction objects and computing logics according to the upstream and downstream topological relationships of the spanning tree.
- (4)
- Universality. The algorithm is automatically applicable to VAV systems with different numbers of end rooms and different air duct structures.
- (5)
- The spatial requirements for the building operations depend on what needs to be measured and controlled (such as the temperature, humidity, or illumination). For example, in closed-loop daylight acquisition [54], the intelligent building system needs to stream data from 51 workstations in two rooms to collect physical data on daylight and artificial lighting. In contrast, the distribution of temperature in the VAV system’s optimization control case in this paper is limited to a single room. The spatial data required for a local building operation generally does not exceed the range of the space unit or equipment unit to which it belongs, and when it exceeds this range, data processing and calculation are performed through node interaction.
3.2. Key Challenges of APP Development
4. Methodology
4.1. Defining SwarmL
4.1.1. SwarmL Model
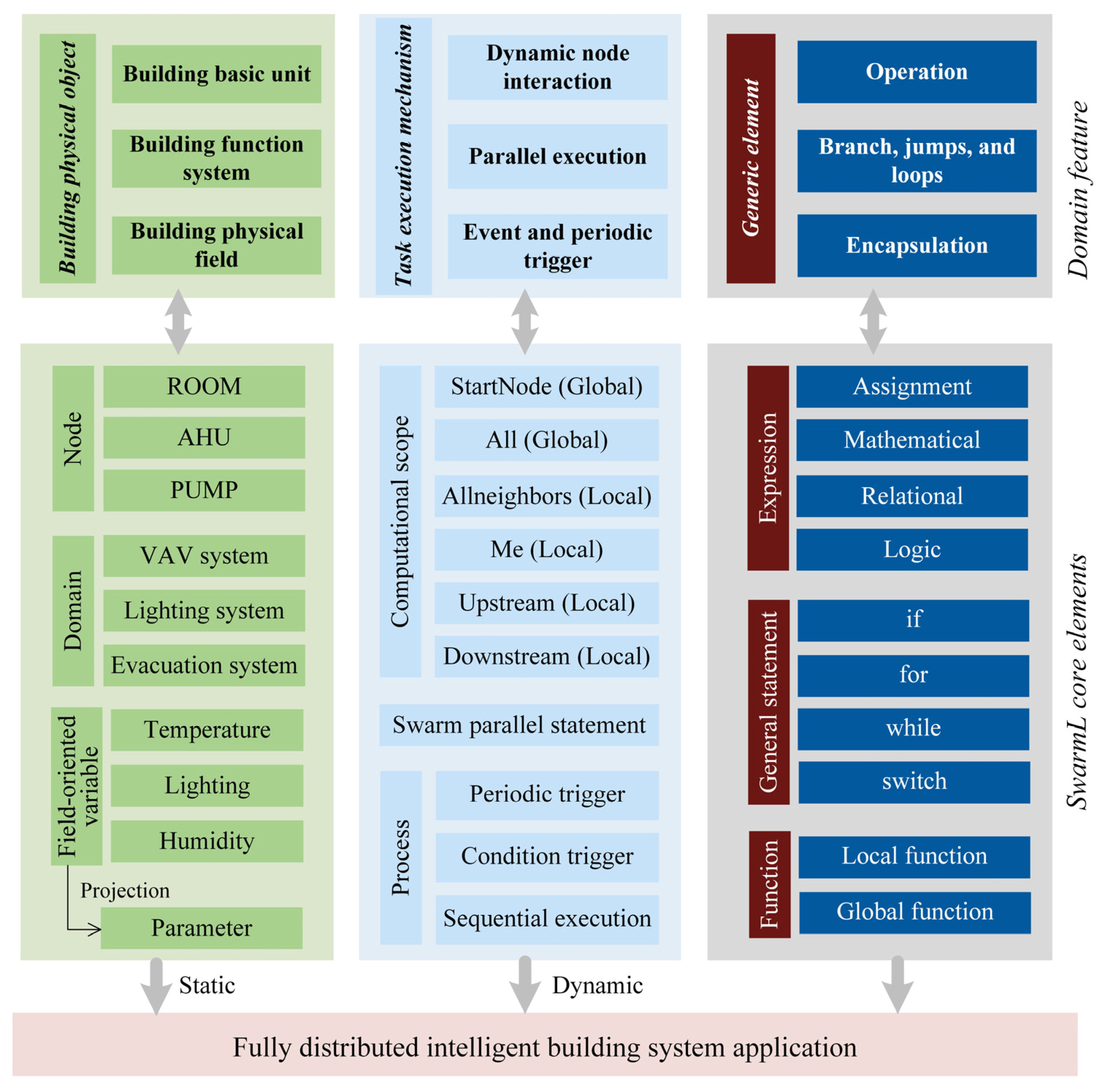
4.1.2. Framework of SwarmL
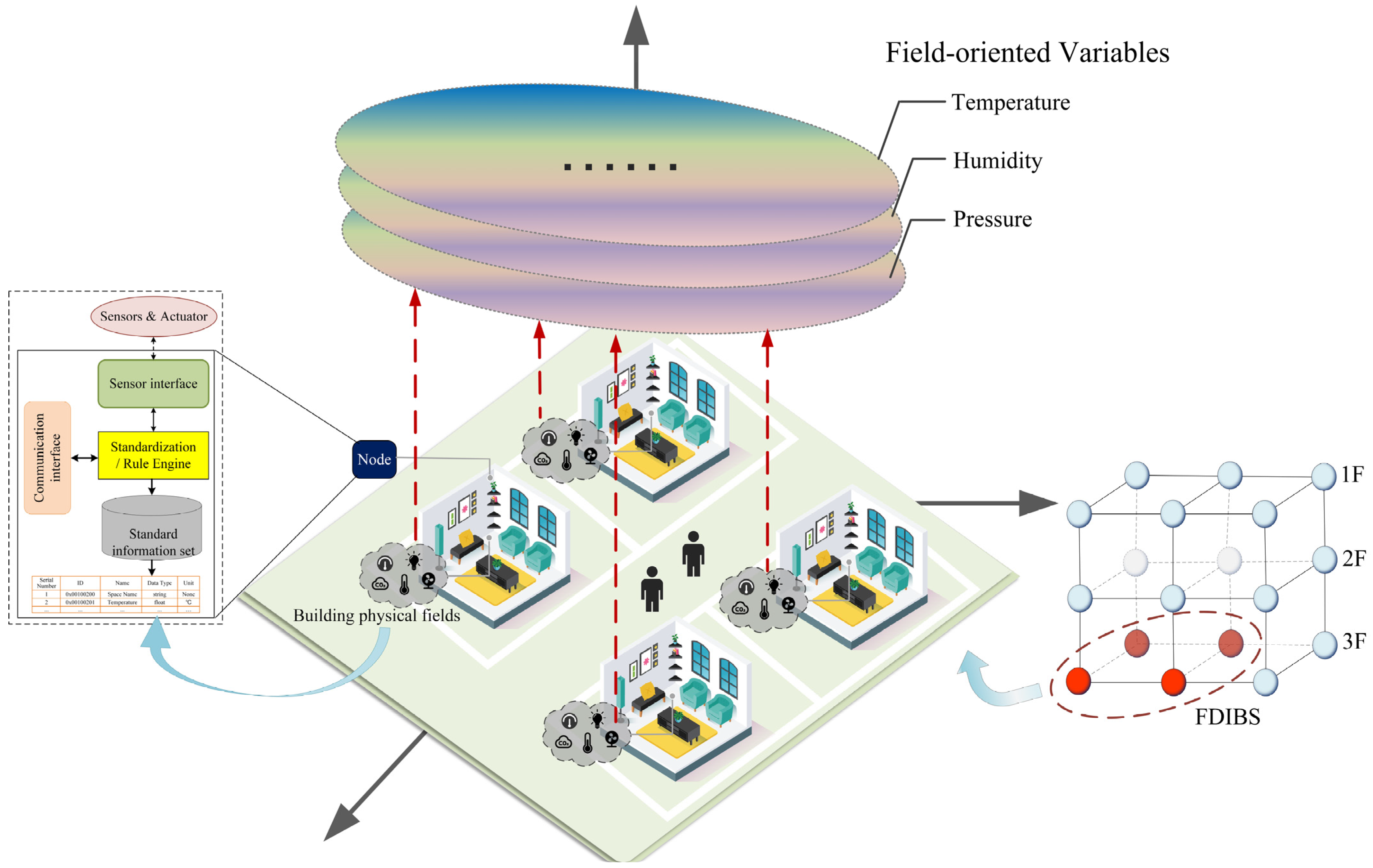
4.1.3. Physical Field-Oriented Variables
- VarData: The data attribute of the variable, also called a parameter, represents the data values of the variable onto a collection of nodes with specific functional roles and the time at which each value is generated. Parameters can be directly substituted into expressions or functions for operations in programming.
- VarDist: The distribution attribute represents the set of nodes where valid values of the variable exist and is represented by the node type and the domain name to which the node belongs.
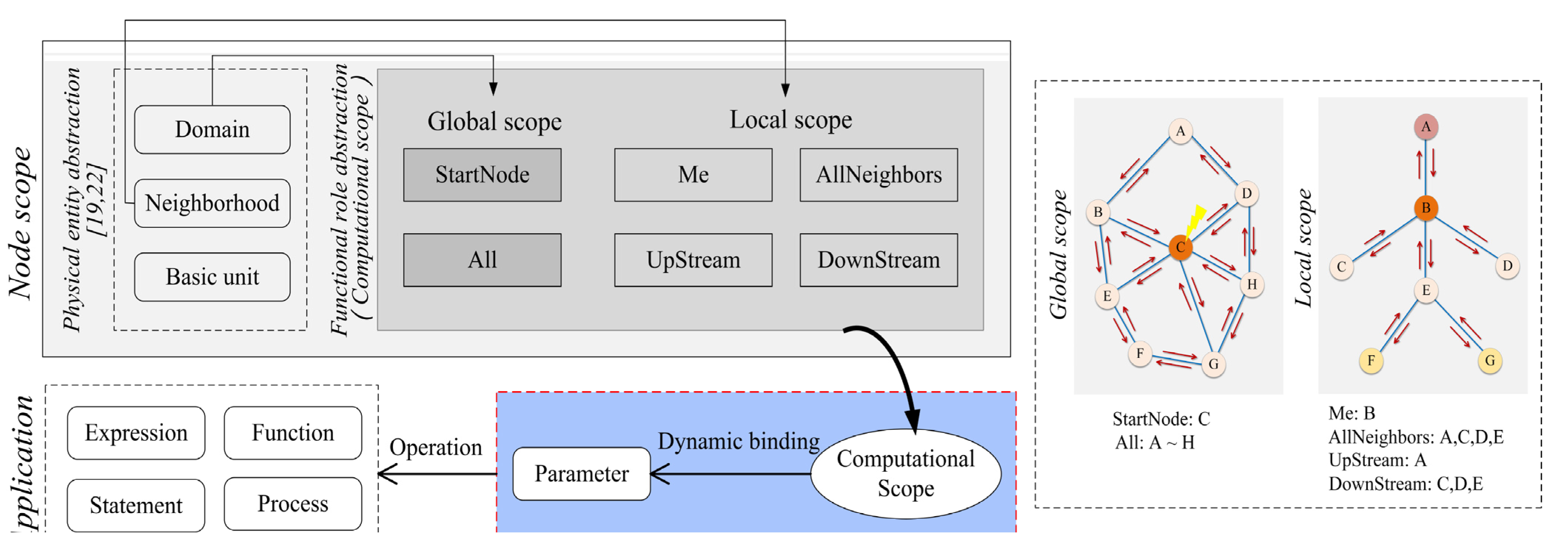
4.1.4. Dynamic Computational Scope
- GStartNode: The node that triggers the computing tasks from the global perspective of the computing network.
- GAll: All nodes in the domain from the global perspective of the computing network.
- LMe: When describing a local computing mechanism, this represents a node itself.
- LAllNeighbors: When describing a local computing mechanism, this represents the set of all existing neighbors around a node.
- LUpstream: When the computing network forms a spanning tree with the starting node as the root node, this represents the upstream neighbor node.
- LDownstream: When the computing network forms a spanning tree with the starting node as the root node, this represents the set of downstream neighbor nodes.
4.2. Key Implementation Mechanisms of SwarmL
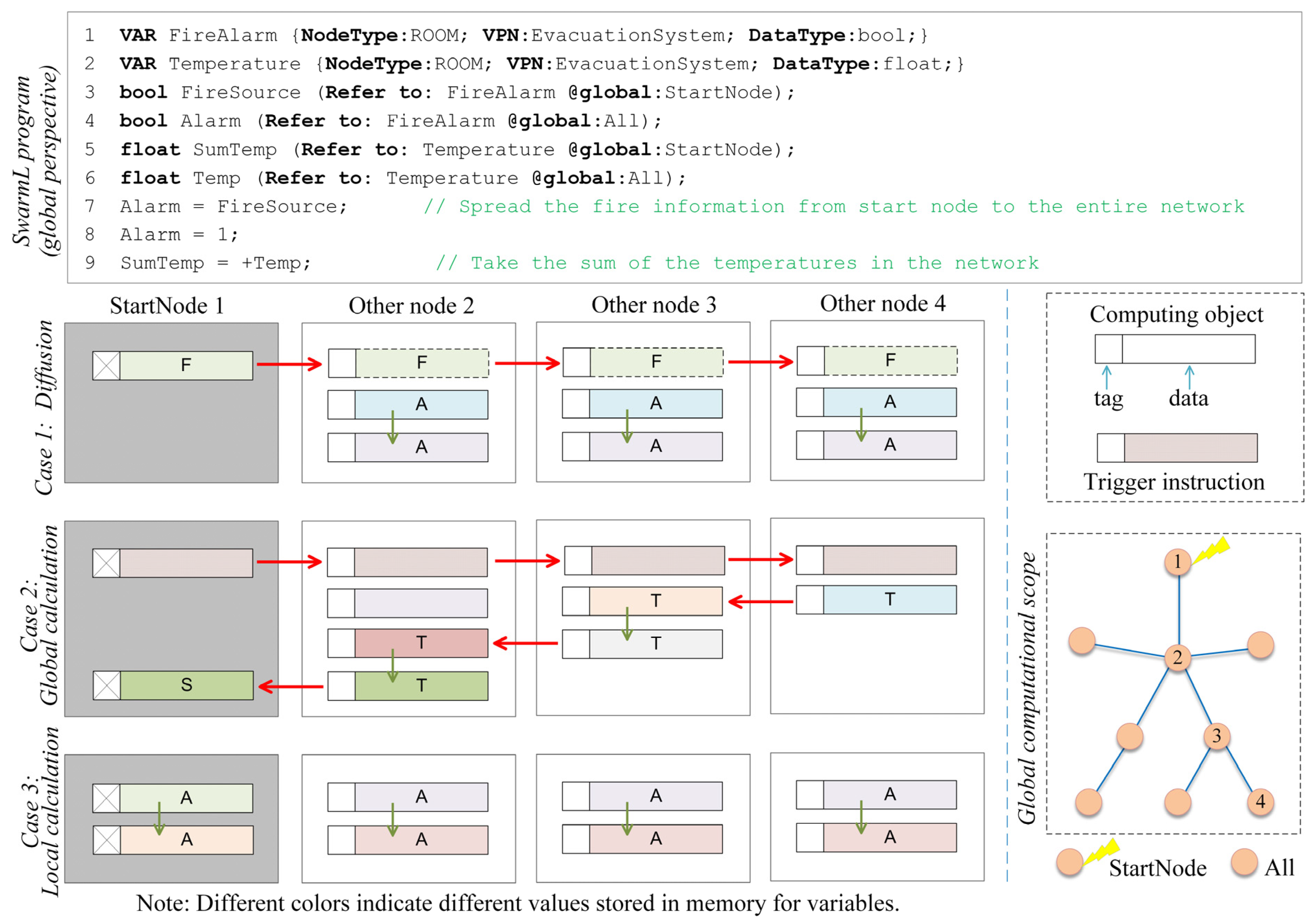
4.2.1. Global Synchronous Diffusion
4.2.2. Global Calculation
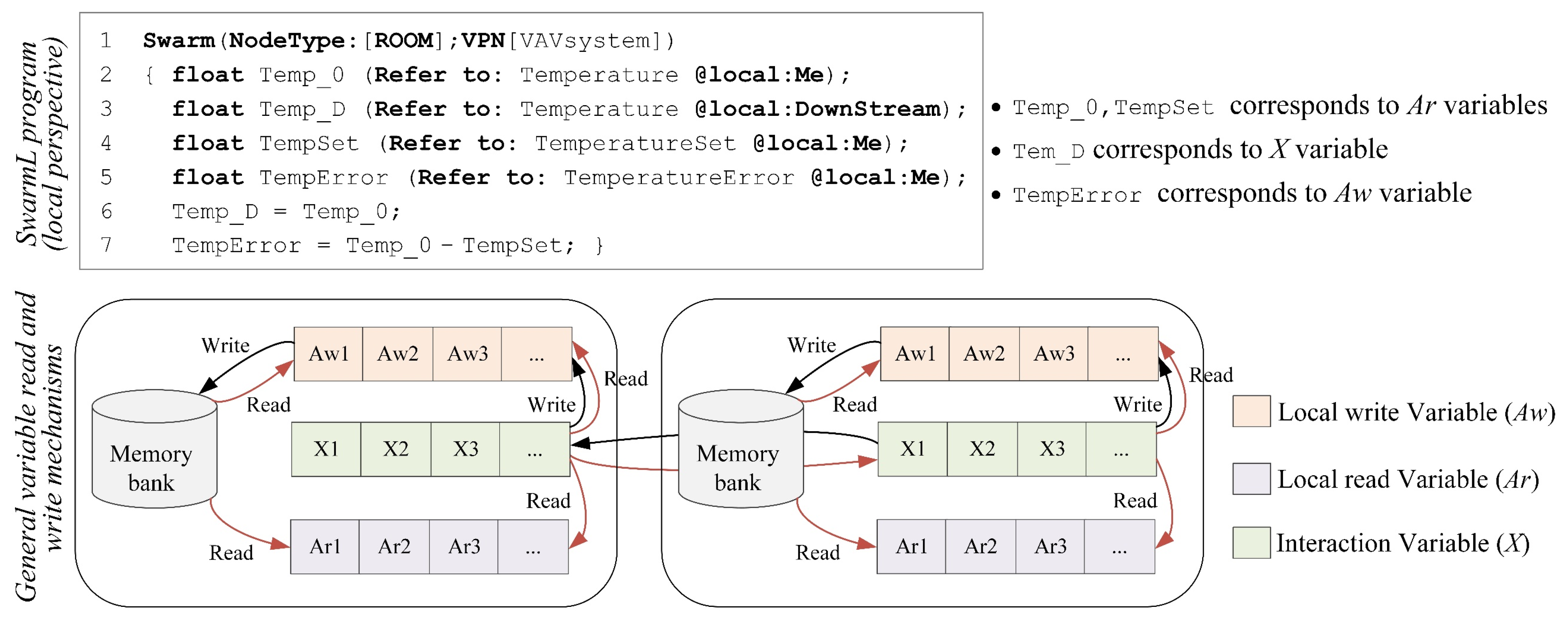
4.2.3. Masking the Details of Variable Read and Write Mechanisms
- If the computational scope of a parameter is AllNeighbors, it means that the data used in the calculation are from neighbor nodes, and the parameter corresponds to the X variable. Similarly, if the computational scope of the parameter is Upstream or Downstream, it means that the calculation is performed on a temporarily generated spanning tree, and the data are from the upstream or downstream neighbors. This parameter corresponds to the X variable as well, e.g., the parameter Temp_D in Figure 10.
- If the computational scope of the parameter is Me, it means that the data used in the calculation come from the node itself, and this parameter corresponds to the Ar or Aw variable. Furthermore, if this parameter does not appear to the left of the equals sign in all programs, it means that the value of this parameter is read in all statements, and this parameter corresponds to the Ar variable, e.g., the parameters Temp_0 and TempSet. Otherwise, this parameter corresponds to the Aw variable, e.g., the parameter TempError.
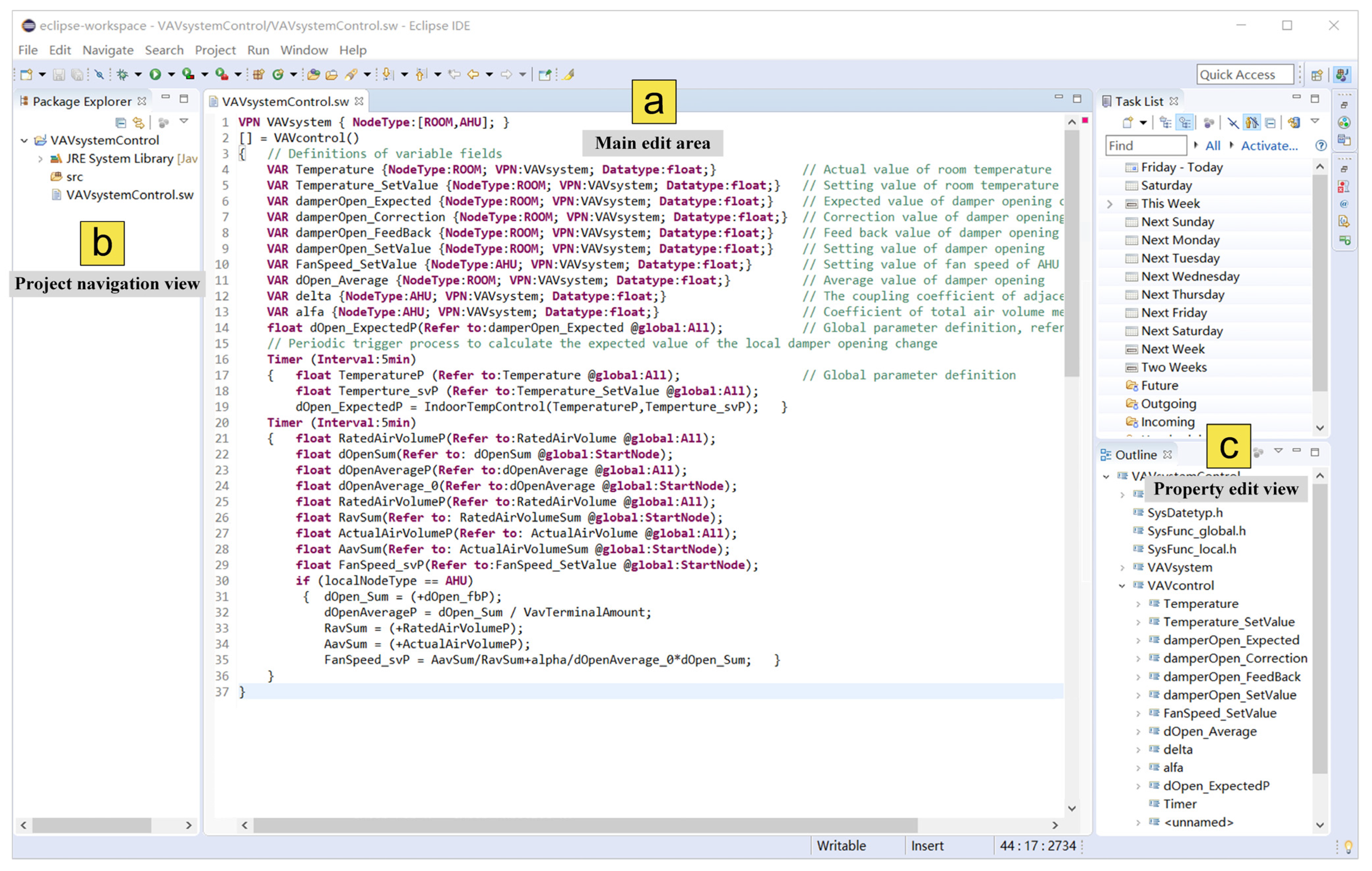
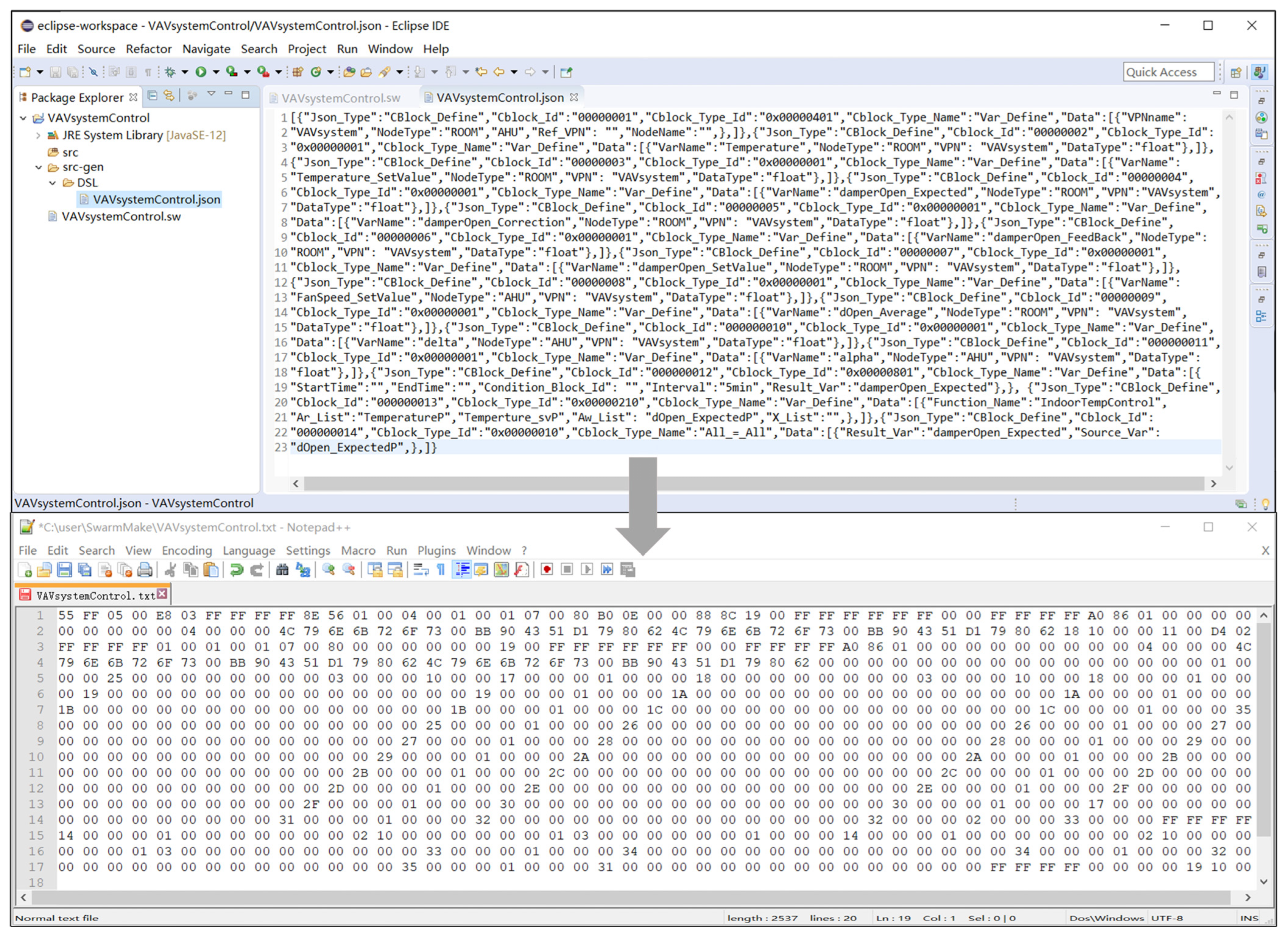
4.2.4. Integrated Development Tool of SwarmL
5. Evaluating SwarmL
5.1. Description Ability Verification
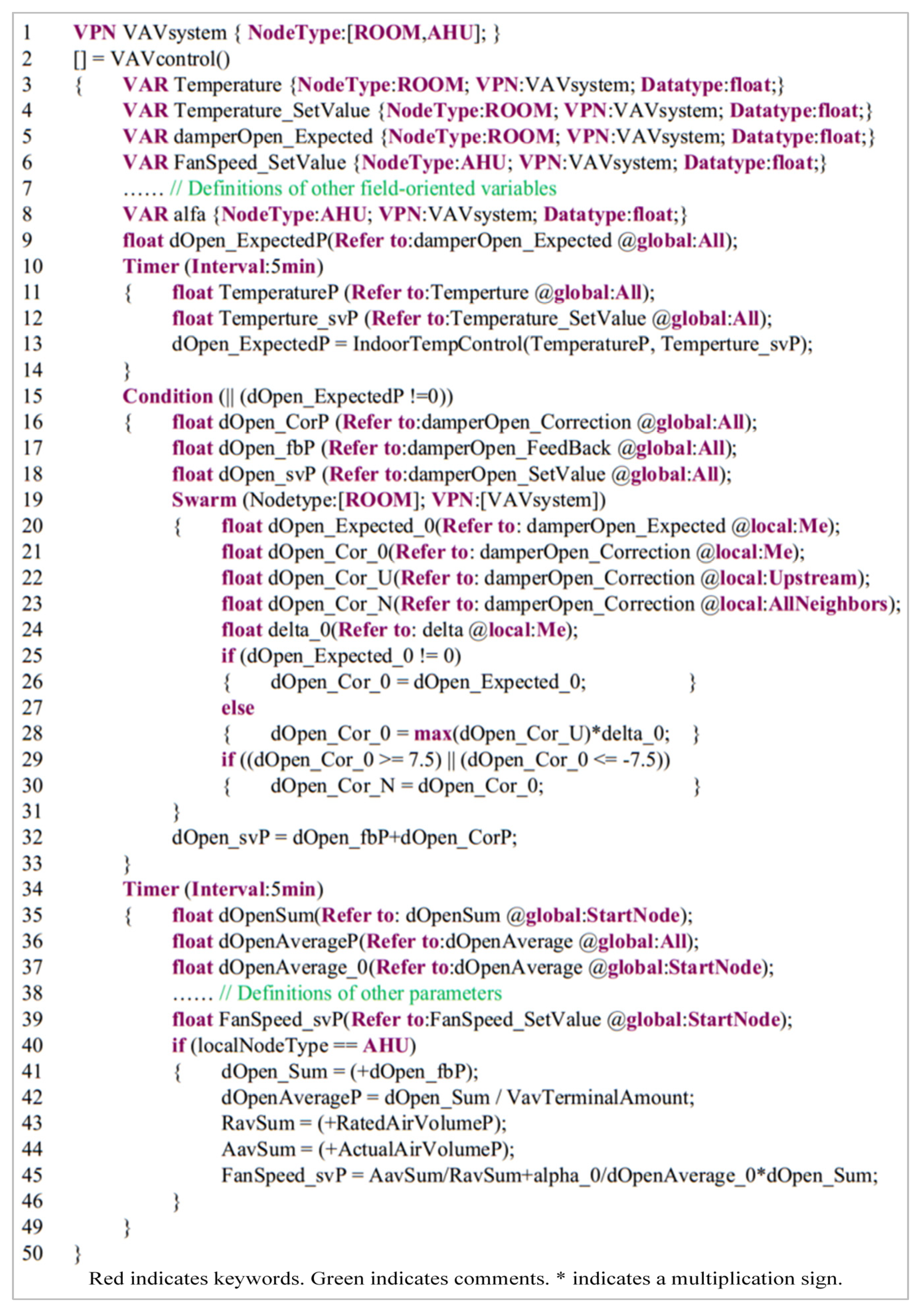
5.1.1. Developing a VAV Optimization Control APP Using SwarmL
5.1.2. Developmental Summary
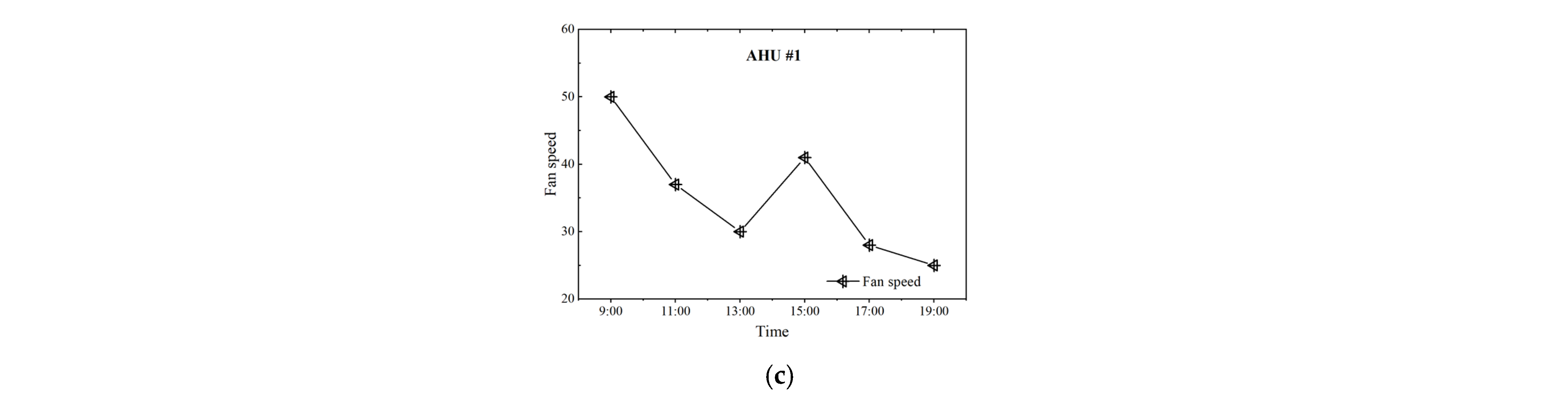
5.2. Effectiveness Verification
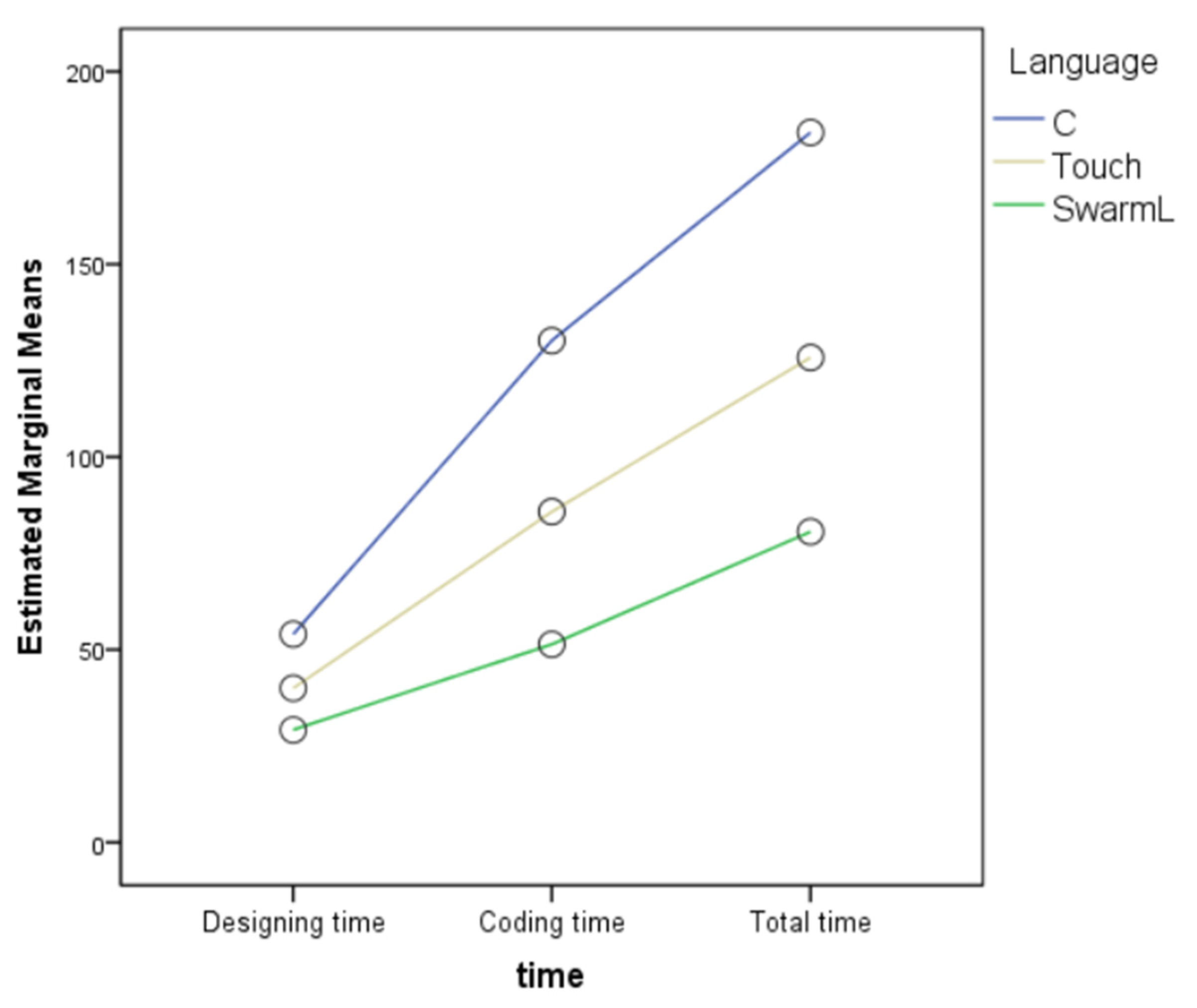
5.3. Efficiency Verification
- M1: Time spent on designing;
- M2: Time spent on coding;
- M3: Total time spent on the development.
5.3.1. Experimental Method
- (1)
- Subject
- (2)
- Experimental tasks
- (3)
- Variables
- (4)
- Process and materials
5.3.2. Results
5.3.3. Threats to Validity
5.3.4. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AHU | Air handling unit |
| APP | Application |
| Ar | Local input variable |
| AST | Abstract syntax tree |
| Aw | Local output variable |
| BIM | Building information model |
| CPN | Computing process node |
| DCU | Drive controller unit |
| df | Degree of freedom |
| FDIBS | Fully distributed intelligent building system |
| Fs | Fan speed |
| f1 | Fuzzy control function for calculating expected value of damper opening change |
| f2 | Local function for calculating fan speed |
| GAll | All nodes in domain |
| GQM | Goal question metric |
| GStartNode | Nodes that trigger computing tasks |
| GUI | Graphical user interface |
| HVAC | Heating, ventilation, and air conditioning |
| IDE | Integrated development environment |
| INR | Individual, neighborhood, and region |
| IT | Information technology |
| I2B | Insect intelligent building |
| LAllNeighbors | Set of all existing neighbors around a node when describing a local computing mechanism |
| LDownstream | Set of downstream neighbor nodes when computing network forms a spanning tree with the starting node as the root node |
| LMe | Node itself when describing a local computing mechanism |
| LUpstream | Upstream neighbor node when computing network forms a spanning tree with the starting node as the root node |
| MPI | Message passing interface |
| M1 | Time spent on designing |
| M2 | Time spent on coding |
| M3 | Total time spent on development |
| OpenMP | Open multi-processing |
| Qj | Required air volume of room j |
| Qsum | Sum of required air volumes of all rooms |
| RC | Research challenge |
| ROS | Robot operating system |
| S.D. | Standard deviation |
| SwDET | SwarmL development environment tool |
| t | Statistic of test |
| Tact | Actual measurement of temperature |
| TOTA | Tuples on the air |
| Tset | Setting value of temperature |
| VarData | Data attribute of field-oriented variable |
| VarDist | Distribution attribute of field-oriented variable |
| VAV | Variable air volume |
| Vfb | Feedback value of damper opening |
| Vset | Setting value of damper opening |
| WSN | Wireless sensor network |
| WYSIWYG | What you see is what you get |
| X | Interactive variable |
| 2OPL | Organization oriented programming language |
| α | Level of statistical significance |
| β | Coefficient in total air volume method |
| δ | Coupling coefficient of adjacent damper changes |
| ΔVcor | Correction value of damper opening change |
| ΔVi | Variation in damper opening of neighbor node i |
| ΔV0 | Expected value of damper opening change |
Appendix A



References
- Froufe, M.M.; Chinelli, C.K.; Guedes, A.L.; Haddad, A.N.; Hammad, A.W.; Soares, C.A. Smart buildings: Systems and drivers. Buildings 2020, 10, 153. [Google Scholar] [CrossRef]
- Ceglia, F.; Marrasso, E.; Roselli, C.; Sasso, M. Time-evolution and forecasting of environmental and energy performance of electricity production system at national and at bidding zone level. Energy Convers. Manag. 2022, 265, 115772. [Google Scholar] [CrossRef]
- Ceglia, F.; Esposito, P.; Marrasso, E.; Sasso, M. From smart energy community to smart energy municipalities: Literature review, agendas and pathways. J. Clean. Prod. 2020, 254, 120118. [Google Scholar] [CrossRef]
- Ceglia, F.; Esposito, P.; Faraudello, A.; Marrasso, E.; Rossi, P.; Sasso, M. An energy, environmental, management and economic analysis of energy efficient system towards renewable energy community: The case study of multi-purpose energy community. J. Clean. Prod. 2022, 369, 133269. [Google Scholar] [CrossRef]
- Kennedy, J. Swarm intelligence. In Handbook of Nature-Inspired and Innovative Computing; Springer: Boston, MA, USA, 2006; pp. 187–219. [Google Scholar] [CrossRef]
- Bonabeau, E.; Theraulaz, G.; Dorigo, M.; Theraulaz, G.; Marco, D. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press: Oxford, UK, 1999. [Google Scholar] [CrossRef]
- Zhao, Q.; Jiang, Z. Insect Intelligent Building (I2B): A New Architecture of Building Control Systems Based on Internet of Things (IoT). In Proceedings of the International Conference on Smart City and Intelligent Building; Springer: Singapore, 2018; pp. 457–466. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, L.; Dounis, A.I.; Yang, R. Multi-agent control system with information fusion based comfort model for smart buildings. Appl. Energy 2012, 99, 247–254. [Google Scholar] [CrossRef]
- Jiang, Z.; Dai, Y.C. A decentralized, flat-structured building automation system. Energy Procedia 2017, 122, 68–73. [Google Scholar] [CrossRef]
- Gamayunova, O.; Vatin, N. BIM-technology in architectural design. In Advanced Materials Research; Trans Tech Publications Ltd.: Wollerau, Switzerland, 2015; pp. 2611–2614. [Google Scholar]
- Donato, V.; Lo Turco, M.; Bocconcino, M.M. BIM-QA/QC in the architectural design process. Archit. Eng. Des. Manag. 2018, 14, 239–254. [Google Scholar] [CrossRef]
- Dounas, T.; Lombardi, D.; Jabi, W. Framework for decentralised architectural design BIM and Blockchain integration. Int. J. Archit. Comput. 2021, 19, 157–173. [Google Scholar] [CrossRef]
- Wang, D.; Arens, E.; Federspiel, C. Opportunities to save energy and improve comfort by using wireless sensor networks in buildings. In Proceedings of the Third International Conference for Enhanced Building Operations, Berkeley, CA, USA, 13–15 October 2003. [Google Scholar]
- Salsbury, T.I. Control performance assessment for building automation systems. IFAC Proc. Vol. 2006, 39, 7–18. [Google Scholar] [CrossRef]
- Chapman, B.; Jost, G.; Van Der Pas, R. Using OpenMP: Portable Shared Memory Parallel Programming; MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Gropp, W.; Gropp, W.D.; Lusk, E.; Skjellum, A.; Lusk, A. Using MPI: Portable Parallel Programming with the Message-Passing Interface; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Whitehouse, K.; Sharp, C.; Culler, D.; Brewer, E. Hood: A neighborhood abstraction for sensor networks. In Proceedings of the Second International Conference on Mobile Systems, Applications, and Services (MobiSys2004), Boston, MA, USA, 6–9 June 2004; pp. 99–110. [Google Scholar] [CrossRef]
- Mottola, L.; Picco, G.P. Logical neighborhoods: A programming abstraction for wireless sensor networks. In Proceedings of the International Conference on Distributed Computing in Sensor Systems; Springer: Heidelberg, Germany, 2006; pp. 150–168. [Google Scholar] [CrossRef]
- Zhao, S.; Yang, Q.; Xing, J.; Zhou, Q.; Xue, G.; Chen, W.J. INR: A Programming Model for Developing APPs of Insect Intelligent Building. Sci. Program. 2020, 2020, 3659849. [Google Scholar] [CrossRef]
- Mottola, L.; Picco, G.P. Programming wireless sensor networks: Fundamental concepts and state of the art. ACM Comput. Surv. 2011, 43, 1–51. [Google Scholar] [CrossRef]
- Patel, P.; Cassou, D. Enabling high-level application development for the Internet of Things. J. Syst. Softw. 2015, 103, 62–84. [Google Scholar] [CrossRef]
- Chen, W.J.; Yang, Q.; Jiang, Z.; Xing, J.; Zhao, Q.; Zhou, Q. Touch: A Textual Programming Language for Developing APPs of Insect Intelligent Building. Sci. Program. 2020, 2020, 8887588. [Google Scholar] [CrossRef]
- Chen, W.J.; Yang, Q.; Zhao, S.; Xing, J.; Zhou, Q. A Graphical Programming Language and Its Supporting Tool for Insect Intelligent Building. Sci. Program. 2020, 2020, 9634389. [Google Scholar] [CrossRef]
- Pinciroli, C.; Beltrame, G. Buzz: A programming language for robot swarms. IEEE Softw. 2016, 33, 97–100. [Google Scholar] [CrossRef]
- Pinciroli, C.; Beltrame, G. Buzz: An extensible programming language for heterogeneous swarm robotics. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 3794–3800. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; p. 5. [Google Scholar]
- Pianini, D.; Viroli, M.; Beal, J. Protelis: Practical aggregate programming. In Proceedings of the 30th Annual ACM Symposium on Applied Computing, Salamanca, Spain, 13–17 April 2015; pp. 1846–1853. [Google Scholar] [CrossRef]
- BenSaleh, M.S.; Saida, R.; Kacem, Y.H.; Abid, M. Wireless Sensor Network Design Methodologies: A Survey. J. Sens. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Zabielski, J.; Srokosz, P. Monitoring of structural safety of buildings using wireless network of mems sensors. Buildings 2020, 10, 193. [Google Scholar] [CrossRef]
- Yaqoob, I.; Ahmed, E.; Hashem, I.; Ahmed, A.; Gani, A.; Imran, M. Internet of things architecture: Recent advances, taxonomy, requirements, and open challenges. IEEE Wirel. Commun. 2017, 24, 10–16. [Google Scholar] [CrossRef]
- Kasznar, A.P.; Hammad, A.W.; Najjar, M.; Linhares, E.; Figueiredo, K.; Soares, C.A.; Haddad, A.N. Multiple dimensions of smart cities’ infrastructure: A review. Buildings 2021, 11, 73. [Google Scholar] [CrossRef]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Reflections on the future of swarm robotics. Sci. Robot. 2020, 5, eabe4385. [Google Scholar] [CrossRef]
- Boissier, O.; Bordini, R.H.; Hübner, J.F.; Ricci, A.; Santi, A. Multi-agent oriented programming with JaCaMo. Sci. Comput. Program. 2013, 78, 747–761. [Google Scholar] [CrossRef]
- Hamann, H. Space-Time Continuous Models of Swarm Robotic Systems: Supporting Global-to-Local Programming; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Beal, J.; Pianini, D.; Viroli, M. Aggregate Programming for the Internet of Things. Computer 2015, 48, 22–30. [Google Scholar] [CrossRef]
- Casadei, R.; Fortino, G.; Pianini, D.; Russo, W.; Savaglio, C.; Viroli, M. Modelling and simulation of opportunistic IoT services with aggregate computing. Future Gener. Comput. Syst. 2019, 91, 252–262. [Google Scholar] [CrossRef]
- Beal, J.; Dulman, S.; Usbeck, K.; Viroli, M.; Correll, N. Organizing the aggregate: Languages for spatial computing. In Formal and Practical Aspects of Domain-Specific Languages: Recent Developments; IGI Global: Hershey, PA, USA, 2013; pp. 436–501. [Google Scholar] [CrossRef]
- Beal, J.; Viroli, M. Space–time programming. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140220. [Google Scholar] [CrossRef] [PubMed]
- Beal, J.; Viroli, M. Building blocks for aggregate programming of self-organising applications. In Proceedings of the 2014 IEEE Eighth International Conference on Self-Adaptive and Self-Organizing Systems Workshops, London, UK, 8–12 September 2014; pp. 8–13. [Google Scholar] [CrossRef]
- Viroli, M.; Beal, J.; Damiani, F.; Audrito, G.; Casadei, R.; Pianini, D. From distributed coordination to field calculus and aggregate computing. J. Log. Algebraic Methods Program. 2019, 109, 100486. [Google Scholar] [CrossRef]
- Nicola, R.D.; Loreti, M.; Pugliese, R.; Tiezzi, F. A Formal Approach to Autonomic Systems Programming: The SCEL Language. ACM Trans. Auton. Adapt. Syst. 2014, 9, 1–29. [Google Scholar] [CrossRef]
- Viroli, M.; Casadei, R.; Pianini, D. On execution platforms for large-scale aggregate computing. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct, Heidelberg, Germany, 12–16 September 2016; pp. 1321–1326. [Google Scholar] [CrossRef]
- Zambonelli, F.; Omicini, A.; Anzengruber, B.; Castelli, G.; De Angelis, F.; Serugendo, G. Developing pervasive multi-agent systems with nature-inspired coordination. Pervasive Mob. Comput. 2015, 17, 236–252. [Google Scholar] [CrossRef]
- Viroli, M.; Damiani, F.; Beal, J. A calculus of computational fields. In Proceedings of the European Conference on Service-Oriented and Cloud Computing; Springer: Heidelberg, Germany, 2013; pp. 114–128. [Google Scholar] [CrossRef]
- Audrito, G.; Viroli, M.; Damiani, F.; Pianini, D.; Beal, J. A higher-order calculus of computational fields. ACM Trans. Comput. Log. 2019, 20, 1–55. [Google Scholar] [CrossRef]
- Viroli, M.; Damiani, F. A calculus of self-stabilising computational fields. In Proceedings of the International Conference on Coordination Languages and Models; Springer: Heidelberg, Germany, 2014; pp. 163–178. [Google Scholar] [CrossRef]
- Mamei, M.; Zambonelli, F. Programming pervasive and mobile computing applications. ACM Trans. Softw. Eng. Methodol. 2009, 18, 1–56. [Google Scholar] [CrossRef]
- Gelernter, D. Generative communication in Linda. ACM Trans. Program. Lang. Syst. (TOPLAS) 1985, 7, 80–112. [Google Scholar] [CrossRef]
- Tinnemeier, N.A. Organizing Agent Organizations: Syntax and Operational Semantics of an Organization-Oriented Programming Language. Ph.D. Thesis, Utrecht University, Utrecht, The Netherlands, 2011. [Google Scholar]
- Okochi, G.S.; Ye, Y. A review of recent developments and technological advancements of variable-air-volume (VAV) air-conditioning systems. Renew. Sustain. Energy Rev. 2016, 59, 784–817. [Google Scholar] [CrossRef]
- Nassif, N.; Tahmasebi, M.; Ridwana, I.; Ebrahimi, P. New optimal supply air temperature and minimum zone air flow resetting strategies for VAV Systems. Buildings 2022, 12, 348. [Google Scholar] [CrossRef]
- He, D.; Xiong, Q.; Jiang, Z. A Novel VAV Air Conditioning Control System Based on Swarm Intelligence. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5007–5012. [Google Scholar] [CrossRef]
- Dai, B.; He, D.; Jiang, Y. Fan control method by total air volume in VAV systems. HV AC 1999, 29, 1–6. [Google Scholar]
- Kent, M.; Huynh, N.K.; Schiavon, S.; Selkowitz, S. Using support vector machine to detect desk illuminance sensor blockage for closed-loop daylight harvesting. Energy Build. 2022, 274, 112443. [Google Scholar] [CrossRef]
- Yu, J.; Liu, Q.; Zhao, A.; Qian, X.; Zhang, R. Optimal chiller loading in HVAC System Using a Novel Algorithm Based on the distributed framework. J. Build. Eng. 2020, 28, 101044. [Google Scholar] [CrossRef]
- Feng, B.; Zhou, Q.; Xing, J.; Yang, Q.; Qin, X.; Mo, Y.; Chen, W. A fully distributed voting strategy for AHU fault detection and diagnosis based on a decentralized structure. Energy Rep. 2022, 8, 390–404. [Google Scholar] [CrossRef]
- Jiang, Z. Distributed Computing Network System and Computing Node Used Therefor. U.S. Patent Application No. 15/740,146, 5 July 2018. [Google Scholar]
- Bettini, L. Implementing Domain-Specific Languages with Xtext and Xtend; Packt Publishing Ltd.: Birmingham, UK, 2016. [Google Scholar]
- Power, J.F.; Malloy, B.A. A metrics suite for grammar-based software. J. Softw. Evol. Process 2004, 16, 405–426. [Google Scholar] [CrossRef]
- Črepinšek, M.; Kosar, T.; Mernik, M.; Cervelle, J.; Forax, R.; Roussel, G. On automata and language based grammar metrics. Comput. Sci. Inf. Syst. 2010, 7, 309–329. [Google Scholar] [CrossRef]
- Van Solingen, R.; Basili, V.; Caldiera, G.; Rombach, H.D. Goal question metric (gqm) approach. In Encyclopedia of Software Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2002. [Google Scholar] [CrossRef]
- Park, E.; Cho, M.; Ki, C.S. Correct use of repeated measures analysis of variance. Korean J. Lab. Med. 2009, 29, 1–9. [Google Scholar] [CrossRef]
- Field, A. Discovering Statistics Using IBM SPSS Statistics; Sage: London, UK, 2013. [Google Scholar]
- Siegmund, J.; Siegmund, N.; Apel, S. Views on Internal and External Validity in Empirical Software Engineering. In Proceedings of the IEEE/ACM IEEE International Conference on Software Engineering, Florence, Italy, 16–24 May 2015; pp. 9–19. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Domain-Specific Data Types | Generic Data Types | ||
|---|---|---|---|
| Nodes | Domains | Field-Oriented Variables | |
| ROOM | VAV system | Temperature | int |
| AHU | Lighting system | Light | float |
| PUMP | Evacuation system | Humidity | bool |
| CHILLER | Chilled water system | Pressure | string |
| … | … | … | … |
| Development Methods | Basic Concepts | C1 | C2 | C3 | C4 | C5 |
|---|---|---|---|---|---|---|
| C language | - | ⨂ | ⨂ | ✔ | ⨂ | ✔ |
| INR model [19] | Individual, neighborhood, region, tag | ⨂ | ✔ | ⨂ | ✔ | ⨂ |
| Graphical language [23] | Graphic element, individual, group, operation | ✔ | ⨂ | ⨂ | ✔ | ✔ |
| Touch [22] | Basic unit, neighborhood, domain | ⨂ | ✔ | ⨂ | ✔ | ✔ |
| SwarmL | Field-oriented variable, computational scope | ✔ | ✔ | ✔ | ✔ | ✔ |
| Metric | Approach | Mean (min) | S.D. (min) |
|---|---|---|---|
| Designing | C Language | 54.00 | 4.90 |
| Touch | 40.00 | 4.64 | |
| SwarmL | 29.20 | 3.19 | |
| Coding | C Language | 130.20 | 12.20 |
| Touch | 85.80 | 11.88 | |
| SwarmL | 51.40 | 6.43 | |
| Total | C Language | 184.20 | 15.06 |
| Touch | 125.80 | 11.52 | |
| SwarmL | 80.60 | 9.48 |
| Dependent Variable | Parameter | Mean Difference | Std. Error | t | p (Sig.) | 95% Confidence Interval | |
|---|---|---|---|---|---|---|---|
| Lower Bound | Upper Bound | ||||||
| Designing | Intercept | 40 | 2 | 21 | 0.000 | 36 | 44 |
| C language | 14 | 3 | 5 | 0.000 | 8 | 20 | |
| SwarmL | −10 | 3 | −4 | 0.002 | −17 | −5 | |
| Touch | 0 | ||||||
| Coding | Intercept | 85 | 5 | 18 | 0.000 | 76 | 96 |
| C language | 44 | 7 | 7 | 0.000 | 30 | 59 | |
| SwarmL | −34 | 7 | −5 | 0.000 | −49 | −20 | |
| Touch | 0 | ||||||
| Total | Intercept | 125 | 5 | 23 | 0.000 | 114 | 138 |
| C language | 58 | 8 | 8 | 0.000 | 42 | 75 | |
| SwarmL | −45 | 8 | −6 | 0.000 | −62 | -28 | |
| Touch | 0 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Yang, Q.; Jiang, Z.; Xing, J.; Zhao, S.; Zhou, Q.; Han, D.; Feng, B. SwarmL: A Language for Programming Fully Distributed Intelligent Building Systems. Buildings 2023, 13, 499. https://doi.org/10.3390/buildings13020499
Chen W, Yang Q, Jiang Z, Xing J, Zhao S, Zhou Q, Han D, Feng B. SwarmL: A Language for Programming Fully Distributed Intelligent Building Systems. Buildings. 2023; 13(2):499. https://doi.org/10.3390/buildings13020499
Chicago/Turabian StyleChen, Wenjie, Qiliang Yang, Ziyan Jiang, Jianchun Xing, Shuo Zhao, Qizhen Zhou, Deshuai Han, and Bowei Feng. 2023. "SwarmL: A Language for Programming Fully Distributed Intelligent Building Systems" Buildings 13, no. 2: 499. https://doi.org/10.3390/buildings13020499
APA StyleChen, W., Yang, Q., Jiang, Z., Xing, J., Zhao, S., Zhou, Q., Han, D., & Feng, B. (2023). SwarmL: A Language for Programming Fully Distributed Intelligent Building Systems. Buildings, 13(2), 499. https://doi.org/10.3390/buildings13020499