El documento resume los componentes y el funcionamiento de los sistemas de navegación global por satélite (GNSS). Explica que estos sistemas incluyen GPS (EEUU), GLONASS (Rusia), Galileo (Europa) y COMPASS (China). Describe que los sistemas GNSS constan de segmentos espaciales (satélites), de control (estaciones terrestres) y de usuarios (receptores). Los satélites transmiten señales que los receptores usan para calcular la posición mediante el tiempo de llegada de las señales a 4 o
0 calificaciones0% encontró este documento útil (0 votos)
159 vistas55 páginas
El documento resume los componentes y el funcionamiento de los sistemas de navegación global por satélite (GNSS). Explica que estos sistemas incluyen GPS (EEUU), GLONASS (Rusia), Galileo (Europa) y COMPASS (China). Describe que los sistemas GNSS constan de segmentos espaciales (satélites), de control (estaciones terrestres) y de usuarios (receptores). Los satélites transmiten señales que los receptores usan para calcular la posición mediante el tiempo de llegada de las señales a 4 o
El documento resume los componentes y el funcionamiento de los sistemas de navegación global por satélite (GNSS). Explica que estos sistemas incluyen GPS (EEUU), GLONASS (Rusia), Galileo (Europa) y COMPASS (China). Describe que los sistemas GNSS constan de segmentos espaciales (satélites), de control (estaciones terrestres) y de usuarios (receptores). Los satélites transmiten señales que los receptores usan para calcular la posición mediante el tiempo de llegada de las señales a 4 o
El documento resume los componentes y el funcionamiento de los sistemas de navegación global por satélite (GNSS). Explica que estos sistemas incluyen GPS (EEUU), GLONASS (Rusia), Galileo (Europa) y COMPASS (China). Describe que los sistemas GNSS constan de segmentos espaciales (satélites), de control (estaciones terrestres) y de usuarios (receptores). Los satélites transmiten señales que los receptores usan para calcular la posición mediante el tiempo de llegada de las señales a 4 o
Descargue como PDF, TXT o lea en línea desde Scribd
Descargar como pdf o txt
Está en la página 1/ 55
Introducción GNSS
• Un sistema global de navegación por satélite (su
acrónimo en inglés, GNSS) es una constelación de satélites que transmite rangos de señales utilizados para el posicionamiento y localización en cualquier parte del globo terrestre, ya sea en tierra, mar o aire. – GPS (GLOBAL POSITION SYTEM). EEUU – GLONASS (GLObal NAvigation Satellite System). RUSO – GALILEO. EUROPEO – COMPASS.CHINO GPS Introducción • GPS es la abreviatura de Global Positioning System y utiliza la constelación NAVSTAR,siendo el acrónimo en inglés de NAVigation System for Time And Ranging, traducido como Sistema de Posicionamiento Global. • Es un sistema de rado navegación desarrollado por el Departamento de Defensa – DoD de EEUU. • • El servicio de posicionamiento estándar –SPS (Standard Positioning Service) pone a disposición señales de uso civil 24 horas/dia. • La metodología se basa en la determinación de la posición de puntos sobre la superficie terrestre, apoyándose en la información radioeléctrica enviada por satélites. • Diseñado para proporcionar en tiempo real una precisión de ±5m a ±15m (Seeber, 2003). • Posicionamiento en un sistema de referencia único. • Desde el punto de vista Geodésico/Topográfico cumple con los dos requerimiento básicos: Levantamiento y Replanteo Componentes del Sistema GNSS Componentes del Sistema GPS SATÉLITES -24 Activos + 3 repuesto - Período 12 horas -20.200 Km de altura RECEPTORES (USUARIO) -Obtención de código y fase -Extracción del mensaje de navegación -Cálculo de posición
SISTEMA DE CONTROL - Sincronización de relojes -Predicción de órbitas -Inyección de datos -Monitoreo de satélites Descripción del sistema
• El segmento Espacial - satélites que giran en órbitas
alrededor de la Tierra . • El segmento de Control - formado por estaciones ubicadas cerca del ecuador terrestre para controlar a los satélites.
• El segmento de Usuarios - cualquiera que reciba y
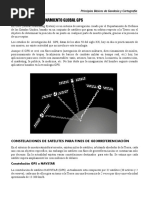
utilice las señales GPS Segmento espacial Constelación: • Existen 31 satélites operativos (fuente: http://www.gps.gov/systems/gps/space/ ). • 20 200 km (MEO) • Está diseñado de tal forma que se pueda contar con un mínimo de 4 satélites visibles por encima de un ángulo de elevación de 15º en cualquier punto de la superficie terrestre, durante las 24 horas del día. Satélites
Funciones: • Recibir y almacenar información transmitida por las estaciones de control • Mantener con precisión el tiempo por medio de los osciladores a bordo • Transmitir información al usuario por el mensaje de la señal • Maniobrar la posición del satélite controlada por segmento de control Satélites • Estos poseen relojes atómicos de alta precisión en una frecuencia fundamental de 10.23Mhz. • Transmiten dos onda portadoras L que viajas a la velocidad de la luz. El mensaje de navegación: Ondas Efemérides de los satélites: información de la portadoras trayectoria de los satélites en su órbita el que permite calcular la posición en el instante de la L1 L2 medición Almanaque: información simplificada de la posición de todos los satélites de la Código C/A Código P Código P constelación Tiempo del sistema: información para la sincronización del receptor con el tiempo GPS Corrección de los relojes: factores de corrección del tiempo Número de identificación del satélite entre otros. Segmento de control
• Funciones • Monitoreo continuo y control de los satélites • Determinación del tiempo GPS • Predecir las efemérides de los satélites • Actualización periódica del mensaje de navegación para cada satélite • Comandar las maniobras de los satélites para mantener la orbita o reposicionarlos Segmento de usuario
• Receptores con la capacidad de recibir la señal GPS y
determinar su posición (antenas, receptores y software). Receptor
Receptor Código C/A+L1+L2 Receptor navegadores geodésico/topográfico Segmento de control • El mensaje de navegación: • Efemérides de los satélites: información de la trayectoria de los satélites en su órbita el que permite calcular la posición en el instante de la medición • Almanaque: información simplificada de la posición de todos los satélites de la constelación • Tiempo del sistema: información para la sincronización del receptor con el tiempo GPS • Corrección de los relojes: factores de corrección del tiempo • Número de identificación del satélite • Estado (salud) del satélite, entre otros. ¿ Cómo funciona el GPS?
• Existen diferentes métodos para obtener una
posición empleando el GPS. El método a utilizar depende de: • La precisión requerida por el usuario y • El tipo de receptor disponible. Ecuaciones Fundamentales Componentes del Sistema GPS
(r1 − )2 = (x − x1)2 + (y − y1)2 + (z − z1)2
(r2 − ) 2 = ( x − x2 ) 2 + ( y − y2 ) 2 + ( z − z2 ) 2 (r3 − ) 2 = ( x − x3 ) 2 + ( y − y3 ) 2 + ( z − z3 ) 2 (r4 − ) 2 = ( x − x4 ) 2 + ( y − y4 ) 2 + ( z − z4 ) 2
r i: pseudodistancia al satélite i : error de reloj x, y, z : posición 3-D de la antena xi, yi, zi : posición 3-D del satélite i • En un sentido amplio de la palabra, estas técnicas pueden ser clasificadas básicamente en 3 clases:
1.- Navegación Autónoma (posicionamiento por código): empleando sólo
un receptor simple. Utilizado por excursionistas, barcos en alta mar y las fuerzas armadas. Proporciona posicionamiento instantáneo de ±5m a ±15m, 95% • Errores: Satélite • Reloj • Órbita (efemérides) Propagación de la señal • Refracción Ionosférica • Refracción Troposférica Receptor • Reloj • Multipath • Correlación código Dilución de la Precisión • VDOP • HPOP • PDOP • GPOP Errores: Satélites
• Efemérides radiodifundidas • Predicción de la posición de los satélites (NAVDATA) • Se cargan diariamente • Se difunden cada hora • Mejora à Efemérides precisas: posición calculada Disponibilidad Selectiva (SA:) Degradación de la señal con 2 componentes: 1. Manipulación de la frecuencia del reloj del satélite generando distintas longitudes de onda. Genera error en la seudo distancia 2. Error en la descripción de la orbita de los satélites (efemérides), transmitida en el mensaje. Errores: Propagación de señal • Retardo ionosférico • La ionosfera es un medio disperso que: • • Dobla la señal y altera su velocidad • • Genera efectos distintos en L1 y en L2 • • Combinación de L1+L2 permite calcular y eliminar el error • Retardo tropoférico • • Aumenta el rango geométrico satélite-receptor • • Afecta a las dos señales por igual (L1 y L2) • • Sus efectos son modelados por algoritmos (predicen el • retardo) • • En distancias cortas se minimiza su efecto (alta correlación) • Retardo ionosférico • • Recepción de la señal por distintos caminos • • Mitigación: • • Evitar instalación cerca de superficies reflectantes • • Configuraciones de antenas Errores: Receptores • Multipath: El error de multitrayectoria se presenta cuando el receptor está ubicado cerca de una gran superficie reflectora, tal como un lago o un edificio. La señal del satélite no viaja directamente a la antena, sino que llega primero al objeto cercano y luego es reflejada a la antena, provocando una medición falsa.
• Correlación código. Código P y código C/A
Dilución de la Precisión
• La Dilución de la Precisión (DOP) es una medida de la fortaleza de la
geometría de los satélites y está relacionada con la distancia entre los estos y su posición en el cielo. El DOP puede incrementar el efecto del error en la medición de distancia a los satélites.
• Mejor solución instantánea
de la posición: • PDOP entre 4 y 5 son buenos • PDOP > 10 son malos • VDOP generalmente bordea entre 5 y 4 • GDOP > 8 2. POSICIONAMIENTO DIFERENCIAL POR CÓDIGO
• GPS diferencial (DGPS)
• Los efectos se remueven con una estación de referencia,con coordenadas fijas. • Se calculan las diferencias respecto de la posición • instantánea. • 1. Corrección de seudodistancia:
• 2. Corrección por posición.
• 3. Simples y Dobles Diferencias (MMCC) • Posicionamiento sub-métrico, de hasta ±0.5m 3. POSICIONAMIENTO DIFERENCIAL POR FASE
• Observable de la fase de onda
portadora (longitud de onda ∼0.20m) • Observable mas precisa que la seudodistancia (longitud de onda ∼300m) • Se logran precisiones del orden de los milímetros • Soluciones para L1 y para L1+L2 • La distancia se obtiene contando el número de ciclos (N) multiplicado por su longitud de onda. ¿Por qué fase portadora?
• Se utiliza la fase portadora porque esta puede proporcionar
una medida hacia el satélite mucho más precisa que la que se consigue utilizando el código C/A o el código P. La onda portadora de L1 tiene una longitud de 19.4cm. Si se pudiera medir el número de longitudes de onda (completas y fraccionarias) que existen entre el satélite y el receptor, se obtendría una distancia muy precisa al satélite ¿Por qué diferenciales dobles?
• La gran parte del error en el que se incurre cuando se realiza una medición autónoma, es producido por las imperfecciones en los relojes del satélite y el receptor. Una manera de evitar este error es utilizar una técnica conocida como Diferencia Doble. • Si dos receptores GPS realizan mediciones a dos satélites diferentes, las diferencias de tiempo entre los receptores y los satélites se cancelan, eliminando cualquier fuente de error que pudieran introducir a la ecuación Resolución de ambigüedades
• Ambigüedad : Número entero de ciclos desconocidode la fase portadora
reconstruida, presentes en una serie de mediciones continuas, de un solo paso de satélite en un mismo receptor. • Después de eliminar los errores del reloj con el método de las dobles diferencias, se puede determinar el número entero de longitudes de onda más la fracción de longitud de onda entre el satélite y la antena del receptor. El problema radica en la existencia de muchos "juegos“ posibles de longitudes de onda enteras para cada satélite, de aquí que la solución sea ambigua. Mediante procesos estadísticos se puede resolver esta ambigüedad y determinar la solución más probable. Post proceso
• Modelos de solución: (Software de procesamiento de
datos) • Diferencias de observaciones entre dos receptores a varios satélites (dobles diferencias) • Permite remover errores comunes en ambos receptores • Soluciones Fija (Fixed) à 1 a 2ppm de la distancia • Soluciones Flotantes (Float) à no mejor que 10 a 20 cm Precisión Tipos de receptores GPS • Receptores de código • Utiliza los datos de almanaque del mensaje de navegación para operar • Proporciona datos de navegación en tiempo real • Pocisionamiento por seudo distancia
• Receptores de simple frecuencia
• Sólo captan la señal L1 • Más económicos • Utilizados para el posicionamiento relativo de líneas bases de hasta 30km (efecto ionosférico despreciables)
• Receptores de doble frecuencia
• Capta la señal L1 y L2 • Más caros que los de simple frecuencia • Resuelven con mayor eficacia el posicionamiento relativo • Elimina efectos de la ionosfera mediante el uso de la combinación de observaciones de L1 y L2 Componentes de receptores GPS • Antena • Detecta las ondas electromagnéticas que envían los satélites • Debe ser sensible a la señal (débil) de los satélites • Permite la recepción de todas las señales captadas por el hemisferio visible • Minimizar los efectos multipath • Tipos • Señales (L1, L1/L2, GNSS, etc …) • Parámetros (modelo) Sensor • Recibe la señal recogida por la antena y la decodifica para convertirla en información legible. (reconstruye e interpreta) Controlador • Unidad que controla en sensor, gestiona las observaciones, almacena los datos y muestra la información al operador. Técnicas de medición GPS 1. Por código:
• Posicionamiento Absoluto • Observación código C/A • Receptores de mano (navegadores) • Aplicaciones: navegación
• Posicionamiento diferencial • Observables de código C/A • Almacenamiento de observaciones • Postproceso y Tiempo Real (RTDGPS) • Receptores modulares y navegadores de mano • Aplicaciones: GIS Técnicas de medición GPS
• Por fase Componentes del Sistema GPS Métodos de Medición ➢ Estático ➢ Estático Rápido ➢ Cinemático • Post – proceso • Tiempo Real (RTK) Componentes del Sistema GPS Método Estático ➢Sesiones prolongadas. Duración entre 20 minutos (DF) a 3 horas (SF) ➢Precisión ± 5 mm + 1 ppm ➢Aplicaciones: •Redes Geodésicas •Mensura minera •Georreferenciación •Apoyo terrestre •Puntos de control ➢Distancias: Componentes del Sistema GPS Componentes del Sistema GPS Método Estático Rápido ➢Sesiones breves. Duración entre 10 minutos (DF) a 30 minutos (SF) ➢Precisión ± 0.5 cm a 1 cm + 1 a 2 ppm ➢Aplicaciones: •Densificación de redes •Georreferenciación •Apoyo terrestre •Poligonación ➢Distancias: Componentes del Sistema GPS Componentes del Sistema GPS Método Cinemático Post-Proceso y RTK ➢Inicialización: Automática (OTF) DF – Punto conocido SF ➢Precisión ± 1 cm a 5 cm + 2 ppm ➢Método de medición Stop&Go - Continuo ➢Aplicaciones: •Levantamientos Topográficos •Topografía de minas •Levantamientos de perfiles •Replanteo (RTK) •Navegación de maquinaria (RTK) ➢Distancias: 5 km hasta 15 km Componentes del Sistema GPS
Procesamiento de datos Base - Móvil
Conociendo Latitud – Longitud - Elevación
Componentes del Sistema GPS Componentes del Sistema GPS Formato de Datos ➢ POST – PROCESO • *.tps = formato nativo equipos TOPCON • *.rinex = formato de intercambio universal
➢ TIEMPO REAL (RTK)
• CMR, CMR+ = formato transmisión de datos equipos TOPCON • RTCM = formato de transmisión universal de datos Componentes del Sistema GPS La Tierra es aparentemente redonda Componentes del Sistema GPS Geoide - Elipsoide Geoide Modelo físico de la Tierra Elipsoide WGS84 Modelo matemático de la Tierra
El sistema GPS trabaja con el elipsoide WGS-84
Componentes del Sistema GPS Modelo Geoidal ➢ Modelo Global • EGM 96 • EGM 08 ➢ Modelo Local • Para generarlo se requieren de puntos nivelados geométricamente, se ingresan en un programa (software) los valores de altura ortométricos y elipsoidales de cada punto, con esta información se calcula el modelo local. Componentes del Sistema GPS Superficies de Referencia
Superficie Terrestre (Topografía)
Geoide – Superficie media en la extension de los océanos
H h
N Elipsoide – Superficie matemática
H=h-N Componentes del Sistema GPS Vector GPS
Z Distancia en terreno Estación 2
VECTOR Medición directa de Geodésica Estación 1 a Estación 2
Estación 1 Y
Elipsoide X Componentes del Sistema GPS Sistema Goecéntrico ECEF Eje Z= eje medio de rotación (eje polar) fijo en el tiempo
Centro de masa de la Tierra (0,0,0)
Eje Y = longitud 90 E Eje Y en plano del ecuador Componentes del Sistema GPS Coordenadas ECEF P Z ➢ Coordenadas Cartesianas (X, Y, Z)
h ➢ Coordenadas Geodésicas y Altura Elipsoidal (φ, λ, h)
Y λ φ X
Y X Componentes del Sistema GPS Resumen ➢ Al menos 2 receptores (1 base y 1 remoto) ➢ Al menos 1 punto debe tener coordenadas conocidas en el Datum requerido (estación base) ➢ Al menos 2 puntos deben tener coordenadas conocidas para calibrar a un sistema local. ➢ Rastrear al menos 4 satélites comunes con buena geometría. ➢ Los datos se deben registrar en tiempos comunes Componentes del Sistema GPS Proyecciones Componentes del Sistema GPS La mayoría de los trabajos utiliza una Superficie de Referencia Componentes del Sistema GPS Localización Componentes del Sistema GPS Resultados (Localización - 2D) Componentes del Sistema GPS Resultados (Localización – Vertical “1-D”) Componentes del Sistema GPS Localización - Recomendaciones ➢ Use solamente puntos de control seguros (fidedignos).
➢ Observe la posición optima en el tiempo (Planificador de jornada).
➢ Use base estable (bípode).
➢ Observe por un mínimo de tiempo de 2 minutos/punto.
➢ Observe que su alrededor se encuentre libre de
obstáculos (efecto multitrayectoria).
➢ Tenga punto de control suficientes.
➢ Mínimo de satélites para obtener optima posición.