El documento presenta los resultados del análisis cinemático de tres configuraciones de un mecanismo de 4 barras. La configuración 1 es un mecanismo de Grashof que puede rotar en todas sus posiciones. La configuración 2 cumple condiciones de Grashof casi completamente pero tiene restricciones en dos ángulos. La configuración 3 no es Grashof debido a que tiene muchas más restricciones. Los datos analíticos como las longitudes de los eslabones determinan si un mecanismo es de Grashof o no dependiendo de si tiene re
El documento presenta los resultados del análisis cinemático de tres configuraciones de un mecanismo de 4 barras. La configuración 1 es un mecanismo de Grashof que puede rotar en todas sus posiciones. La configuración 2 cumple condiciones de Grashof casi completamente pero tiene restricciones en dos ángulos. La configuración 3 no es Grashof debido a que tiene muchas más restricciones. Los datos analíticos como las longitudes de los eslabones determinan si un mecanismo es de Grashof o no dependiendo de si tiene re
El documento presenta los resultados del análisis cinemático de tres configuraciones de un mecanismo de 4 barras. La configuración 1 es un mecanismo de Grashof que puede rotar en todas sus posiciones. La configuración 2 cumple condiciones de Grashof casi completamente pero tiene restricciones en dos ángulos. La configuración 3 no es Grashof debido a que tiene muchas más restricciones. Los datos analíticos como las longitudes de los eslabones determinan si un mecanismo es de Grashof o no dependiendo de si tiene re
El documento presenta los resultados del análisis cinemático de tres configuraciones de un mecanismo de 4 barras. La configuración 1 es un mecanismo de Grashof que puede rotar en todas sus posiciones. La configuración 2 cumple condiciones de Grashof casi completamente pero tiene restricciones en dos ángulos. La configuración 3 no es Grashof debido a que tiene muchas más restricciones. Los datos analíticos como las longitudes de los eslabones determinan si un mecanismo es de Grashof o no dependiendo de si tiene re
Descargue como DOCX, PDF, TXT o lea en línea desde Scribd
Descargar como docx, pdf o txt
Está en la página 1/ 6
Universidad Tecnológica De Panamá
Facultad De Ingeniería Mecánica
Licenciatura en Ingeniería Naval Laboratorio De Mecanismo Informe N°6 Velocidad de Mecanismos Medina, Carlos Instructor: 8-921-1094 Coby Aldeano Ferrufino, Mircala Fecha: 8-899-1149 03/06/2020
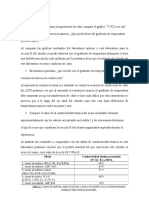
Introducción En el análisis de velocidad analítico de un mecanismo se da después de analizar la posición debido a que el movimiento es inherente a las maquinas, las cantidades cinemáticas como la velocidad y aceleración son de importancia para el análisis y diseño de los componentes de un mecanismo y así nos da un resultado más preciso al usar este tipo de método. Para un análisis de velocidad necesitamos conocer la aceleración angular cada proceso se realiza con pequeños incrementos de valor de variable de entrada es decir de lo grados de libertad. Si la entra es un ángulo θ, el incremento puede ser de 1° cada vez que, si la entrada aumenta a una distancia x, el incremento puede ser de 1mm o más puede cambiar su grado de libertad. Pregunta y Resultados 1. Calcular y graficar los valores de las velocidades angulares de los eslabones 3 y 4, para una revolución completa del eslabón de entrada Para cada una de las medidas de eslabones dadas. 𝜔2 = 3 𝑟𝑎𝑑/𝑠 Considerar las siguientes configuraciones: θ2 θ3 θ4 ω3 ω4 0 28.96 57.91 -1.5 -1.5 30 18.51 53.67 -0.6 0.52 60 15.46 64.11 -0.08 1.40 90 16.03 79.52 0.17 1.61 120 18.75 95.33 0.37 1.51 150 23.40 109.08 0.56 1.21 180 29.99 118.97 0.75 0.75 210 38.14 123.82 0.86 0.21 240 46.55 123.13 0.79 -0.36 270 52.90 116.39 0.43 -1.01 300 53.68 102.32 -0.35 -1.83 330 44.88 80.04 -1.40 -2.51 360 28.96 57.91 -1.50 -1.50 Tabla configuración 1: a=10mm b=35mm c=20mm d=30mm
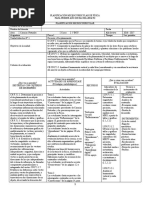
θ2 θ3 θ4 ω3 ω4 0 ERROR ERROR ERROR ERROR 30 42.00 53.74 -20.78 -3.58 60 -7.14 75.68 -2.86 3.25 90 ERROR ERROR ERROR ERROR 120 ERROR ERROR ERROR ERROR 150 ERROR ERROR ERROR ERROR 180 ERROR ERROR ERROR ERROR 210 ERROR ERROR ERROR ERROR 240 ERROR ERROR ERROR ERROR 270 ERROR ERROR ERROR ERROR 300 163.43 -113.75 8.53 2.43 330 -76.99 -65.25 31.12 13.02 360 ERROR ERROR ERROR ERROR Tabla configuraciones 3: a=35mm b=10mm c=30mm d=20mm 2. ¿Qué importancia y ventajas tienen los programas de computadora para el análisis cinemático de mecanismos? R/= Los beneficio de esto es que nos da respuestas precisas ya que la construcción del mecanismo puede ser medio plano usando algún programa como inventor entre otros y podemos comparar de forma grafica en el programa y comparar la precisión de cada programa ya que en forma manual muy muchas veces se pueden cometer errores. 3. ¿Cuál de los métodos considera más fácil de utilizar? (Analítico, gráfico o por mediciones en el mecanismo) R/= Consideramos que el método analítico es el más fácil de utilizar, ya que teniendo los datos principales del mecanismo como lo son: las longitudes de sus eslabones y su ángulo ϴ2, y al tener las fórmulas que describen la posición, la velocidad o la aceleración de los mecanismos, se hace más sencillo obtener sus valores respectivamente y precisos. 4. Compare los resultados de cada mecanismo, indique las posibles causas para las cuales difieren las medidas obtenidas en cada uno de los tres mecanismos.
R/= Los resultados de cada mecanismo son:
Configuración #1: debido a las medidas de los eslabones de esta
configuración se puede determinar que es un mecanismo Grashof, ya que este mecanismo rota en todas sus posiciones, y se pueden determinar en todas sus velocidades y aceleraciones. Configuración #2: Cumple la condición de Grashof en casi todas sus posiciones, pero en dos ángulos tiene restricción por lo que no existe velocidad ni aceleración. Configuración #3: No cumple debido a que las restricciones del mecanismo son máximas, ósea que posee restricciones en casi todos sus puntos y por esto se dice que es No Grashof. 5. ¿Los datos analíticos son suficiente para saber si el mecanismo es Grashof o No-Grashof? R/= Los datos analíticos, son suficientes para saber si es Grashof o No Grashof, por las longitudes de sus eslabones, las que nos van a determinar si el mecanismo restricciones o no en sus posiciones, lo que influiría en sus velocidades y aceleraciones en dichas posiciones. 6. Por medio de la derivación con respecto al tiempo, obtenga las ecuaciones de aceleración de los nodos.
La ecuación vectorial: De estas dos últimas ecuaciones se pueden obtener α31 y α41, quedando resuelto el problema de aceleración.
7. ¿Los nodos son los únicos lugares donde conviene saber la velocidad y aceleración? R/= Si es donde conviene porque desde ese punto es el más conveniente ya que indican la dirección del vector de cada posición de los distintos eslabones del mecanismo por lo que es conveniente hallar la velocidad y aceleración a partir de estos. 8. ¿Si el eslabón de entrada no tiene aceleración angular, los otros también se comportarán con velocidad angular constante? R/= Si, porque de ser un movimiento uniforme, la aceleración angular es cero y los demás puntos cumplirá sus movimientos. Conclusión El mecanismo de 4 barras en el sistema de análisis de velocidad y aceleración consiste en hallar las expresiones angulares del acoplador y del seguidor en cualquier instante de un funcionamiento del mecanismo en base para prescribir las funciones analíticas, así como la posición, velocidad y aceleración aguarles del eslabón de entrada y el cual nos dan las longitudes de cada eslabón y eslabón de entrada y nos dan la posición del angular θ2.
Las posiciones angulares son θ1 , θ2 , θ3 , θ4 y las velocidades y aceleración
angulares del eslabón de entrada w 2 y respectivamente debemos hallar la velocidad y aceleración del acoplador w 3 y del eslabón de salida w 4 en función de las variables anteriores. Mircala Ferrufino