0% encontró este documento útil (0 votos)
125 vistasModulo I Control Automatico 4 1
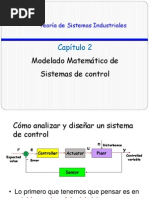
Este documento describe modelos matemáticos para sistemas de control. Explica que las ecuaciones diferenciales se usan para describir sistemas físicos en el dominio del tiempo. Luego introduce la transformada de Laplace, la cual convierte ecuaciones diferenciales en ecuaciones algebraicas más fáciles de manejar. Finalmente, presenta tres modelos matemáticos comunes basados en ecuaciones diferenciales de segundo orden: un sistema eléctrico RLC, un sistema mecánico de traslación y un sistema mecánico de rotación.
Cargado por
খ্রিস্টান ক্রুশ থেকেDerechos de autor
© © All Rights Reserved
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
125 vistasModulo I Control Automatico 4 1
Este documento describe modelos matemáticos para sistemas de control. Explica que las ecuaciones diferenciales se usan para describir sistemas físicos en el dominio del tiempo. Luego introduce la transformada de Laplace, la cual convierte ecuaciones diferenciales en ecuaciones algebraicas más fáciles de manejar. Finalmente, presenta tres modelos matemáticos comunes basados en ecuaciones diferenciales de segundo orden: un sistema eléctrico RLC, un sistema mecánico de traslación y un sistema mecánico de rotación.
Cargado por
খ্রিস্টান ক্রুশ থেকেDerechos de autor
© © All Rights Reserved
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
/ 7