Introduccion Al Control Digital - 2011-2012
Introduccion Al Control Digital - 2011-2012
Descargar como pptx, pdf o txt
También podría gustarte
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- Practica Reloj Digital FinalDocumento8 páginasPractica Reloj Digital FinalEspinosa Roa Rodrigo100% (2)
- Informe de Controladores PIDDocumento20 páginasInforme de Controladores PIDfranco_3210_Aún no hay calificaciones
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (4)
- Modelo de PPI - Plan de Puntos de InspecciónDocumento5 páginasModelo de PPI - Plan de Puntos de InspecciónLourdes Eliza Rivera Araujo50% (2)
- Apuntes CD 2014-2014 Ver1Documento113 páginasApuntes CD 2014-2014 Ver1Torres Marroquin RicardoAún no hay calificaciones
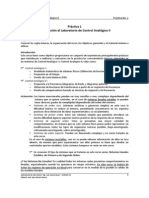
- Practica 1 - LCAIIDocumento5 páginasPractica 1 - LCAIIBernardo Rangel RamirezAún no hay calificaciones
- Prácticas CADocumento12 páginasPrácticas CAAvi Ramirez CervantesAún no hay calificaciones
- Sistemas Digitales Secuenciales UnadDocumento18 páginasSistemas Digitales Secuenciales UnadFERONORTIZAún no hay calificaciones
- Intrduccición Al Control DigitalDocumento45 páginasIntrduccición Al Control DigitalVictoria Sánchez PortilloAún no hay calificaciones
- Practica 1 Laboratorio Control AnalogicoDocumento18 páginasPractica 1 Laboratorio Control AnalogicoBrayan Leonardo Garcia100% (1)
- Tema5 Introduccion A Los STRDocumento36 páginasTema5 Introduccion A Los STRencarnireqAún no hay calificaciones
- Manual Isa TeoricoDocumento111 páginasManual Isa TeoricoYessica Jacqueline Saucedo Jiménez100% (1)
- Control - Digital - Directo Presentación 2Documento47 páginasControl - Digital - Directo Presentación 2Jose Ignacio Rodriguez Negrete100% (2)
- CalefactorDocumento8 páginasCalefactorRafael PajaroAún no hay calificaciones
- Activ. 3.2 Controlador Pid DiscretoDocumento8 páginasActiv. 3.2 Controlador Pid DiscretoDavid ObregonAún no hay calificaciones
- Allen BradleyDocumento89 páginasAllen BradleyCilBricenioAún no hay calificaciones
- Resumen control digital Unidad 1Documento38 páginasResumen control digital Unidad 1Angel PozosAún no hay calificaciones
- Laboratorio N°4Documento23 páginasLaboratorio N°4Kevin Palma100% (1)
- Ingenieria de Control LabDocumento22 páginasIngenieria de Control LabRaul KörralesAún no hay calificaciones
- Sintonización PIDDocumento4 páginasSintonización PIDBraian AvellaAún no hay calificaciones
- Diseño y Ajuste de Controladores PidDocumento13 páginasDiseño y Ajuste de Controladores PidNABEAún no hay calificaciones
- Fase 2 Control DigitalDocumento13 páginasFase 2 Control DigitalJuan Carlos Huertas100% (1)
- Principios de Control y AutomatizaciónDocumento35 páginasPrincipios de Control y AutomatizaciónGianmarco Vasquez VergaraAún no hay calificaciones
- Control DigitalDocumento12 páginasControl Digitaleldani67Aún no hay calificaciones
- AutomatizacionDocumento36 páginasAutomatizacionOsmar VillanuevaAún no hay calificaciones
- Predictivo Adaptativo RobustoDocumento24 páginasPredictivo Adaptativo RobustoGeorgeMarrinesAún no hay calificaciones
- Digital ControlerDocumento56 páginasDigital ControlerEdgar AldásAún no hay calificaciones
- Automatismo de Control para El Acceso A Un GarajeDocumento16 páginasAutomatismo de Control para El Acceso A Un GarajeCesar Alfonso Saldivar MontoyaAún no hay calificaciones
- Actividad #1 Resumen de Temas IntroductoriosDocumento56 páginasActividad #1 Resumen de Temas IntroductoriosYeraldine Rodríguez WilletAún no hay calificaciones
- Trabajo II Control de ProcesosDocumento6 páginasTrabajo II Control de Procesosdavid gonzales calderonAún no hay calificaciones
- Control Automatico Presentacion PDFcompactaparte 1Documento37 páginasControl Automatico Presentacion PDFcompactaparte 1Marco Antonio Campos VeraAún no hay calificaciones
- Resumen Control Digital Unidad 1 Pozos Contreras Angel de Jesus PDFDocumento36 páginasResumen Control Digital Unidad 1 Pozos Contreras Angel de Jesus PDFAngel PozosAún no hay calificaciones
- Fase 3 Consolidado-CONTROL DIGITALDocumento8 páginasFase 3 Consolidado-CONTROL DIGITALDiana100% (2)
- Lab - 2 - Ajuste de ControladoresDocumento6 páginasLab - 2 - Ajuste de ControladoresFaracucho1Aún no hay calificaciones
- Apuntes CD 2014-2014 Ver2Documento113 páginasApuntes CD 2014-2014 Ver2kevinAún no hay calificaciones
- Controlador Pid Digital Implementado en Una PCDocumento21 páginasControlador Pid Digital Implementado en Una PCJC B HdzAún no hay calificaciones
- Dialnet TecnicasDeControlAdaptativasAplicadasASistemasMult 4803537 PDFDocumento6 páginasDialnet TecnicasDeControlAdaptativasAplicadasASistemasMult 4803537 PDFFabian CaizaAún no hay calificaciones
- Control PID Del Balancín Eólico Utilizando Métodos Avanzados de SintonizaciónDocumento5 páginasControl PID Del Balancín Eólico Utilizando Métodos Avanzados de SintonizaciónRaúl AlvaradoAún no hay calificaciones
- Unidad 2 - Controladores PID (Parte II)Documento27 páginasUnidad 2 - Controladores PID (Parte II)actividadespaepaAún no hay calificaciones
- TEMA1Documento24 páginasTEMA1mauricio araibarAún no hay calificaciones
- Reporte de Práctica Semaforo LogixProDocumento8 páginasReporte de Práctica Semaforo LogixProIvan50% (2)
- PID SimulaciónDocumento14 páginasPID Simulaciónjrse103001Aún no hay calificaciones
- Informe Laboratorio Control AnalógicoDocumento7 páginasInforme Laboratorio Control AnalógicoCristhian BolivarAún no hay calificaciones
- Introducción - Muestreo y CuantizacionDocumento29 páginasIntroducción - Muestreo y CuantizacionJDAún no hay calificaciones
- CLASE 1-Andrés ReyesDocumento5 páginasCLASE 1-Andrés ReyesGiulliano Enrique MucciAún no hay calificaciones
- Guia 6c Sintonia de Controladores PIDDocumento36 páginasGuia 6c Sintonia de Controladores PIDPablo Martinez ArteagaAún no hay calificaciones
- Paso 4 Control DigitalDocumento9 páginasPaso 4 Control DigitalFrank Ramirez100% (1)
- EjerciciosDocumento16 páginasEjerciciosAlex Nuñez RamiresAún no hay calificaciones
- Anfred Angelis Cuenca Leiva - Und - 3Documento13 páginasAnfred Angelis Cuenca Leiva - Und - 3Anfred Angelis Cuenca leivaAún no hay calificaciones
- Lab 03 AriasDocumento7 páginasLab 03 AriasStalin AriasAún no hay calificaciones
- Trabajo de Control AutomaticoDocumento26 páginasTrabajo de Control AutomaticoVictor LopezAún no hay calificaciones
- Control Pid de HornoDocumento20 páginasControl Pid de HornoMr LosingAún no hay calificaciones
- Apunte - Pid 1 10Documento10 páginasApunte - Pid 1 10FAUSTO ALEJANDRO GONZALEZAún no hay calificaciones
- TAREA 1-Automatizacion IndustrialDocumento10 páginasTAREA 1-Automatizacion IndustrialjeanAún no hay calificaciones
- Memoria Control ComputarizadoDocumento28 páginasMemoria Control ComputarizadoSalvador Hernández RodríguezAún no hay calificaciones
- Semáforo Con Sensor PDFDocumento12 páginasSemáforo Con Sensor PDFAlberth Castro GonzálezAún no hay calificaciones
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- Guía de laboratorio de mecánica de fluidosDe EverandGuía de laboratorio de mecánica de fluidosAún no hay calificaciones
- Tarea 3 - Metodos DeterministicosDocumento55 páginasTarea 3 - Metodos Deterministicoslucy RapeloAún no hay calificaciones
- 6.1 - Automatización IndustrialDocumento34 páginas6.1 - Automatización Industrialgabriel zapataAún no hay calificaciones
- Practica 2 ConducciónDocumento7 páginasPractica 2 Conduccióncynthia quintanaAún no hay calificaciones
- Enunciado de ClausiusDocumento3 páginasEnunciado de ClausiusJose Enrique Perez EspinozaAún no hay calificaciones
- Práctica # 2 (Control Discreto)Documento2 páginasPráctica # 2 (Control Discreto)AngieAún no hay calificaciones
- Ensayo Proceso de Selección Pragma para DBADocumento3 páginasEnsayo Proceso de Selección Pragma para DBAjosegitijose24Aún no hay calificaciones
- Teo - Evsal - S09 - 2021-2: Termodinámica, Primera Ley de La Termodinámica, Segunda Ley de La TermodinámicaDocumento5 páginasTeo - Evsal - S09 - 2021-2: Termodinámica, Primera Ley de La Termodinámica, Segunda Ley de La TermodinámicaFabian Andre Maquera AlcahuamanAún no hay calificaciones
- Ejercicio 2Documento13 páginasEjercicio 2LYDA LOPEZAún no hay calificaciones
- Intercambiadores de Calor.Documento7 páginasIntercambiadores de Calor.LauraAún no hay calificaciones
- Sistemas TermodinamicosDocumento24 páginasSistemas TermodinamicosWILMAN AULLA CARDENASAún no hay calificaciones
- MET 3F. Examen 3er. Parcial. Termodinámica. HUGO LEON MET 3FDocumento4 páginasMET 3F. Examen 3er. Parcial. Termodinámica. HUGO LEON MET 3FHugo LeónAún no hay calificaciones
- Tesis de Liliana L Ultima Lista CorregidaDocumento93 páginasTesis de Liliana L Ultima Lista Corregidaroxanny ramirezAún no hay calificaciones
- Disponibilidad Sistemas de AutomatizacionDocumento24 páginasDisponibilidad Sistemas de Automatizacionjaime ordonezAún no hay calificaciones
- Leiva - Solucionario Termodinamica 1ra y 2daDocumento46 páginasLeiva - Solucionario Termodinamica 1ra y 2daFer TMuñ50% (2)
- 1.3 Energia y Equilibrio 2Documento23 páginas1.3 Energia y Equilibrio 2Daniela SorianoAún no hay calificaciones
- Sinergia y RecursividadDocumento6 páginasSinergia y RecursividadsamuelAún no hay calificaciones
- Ejercicios Termodinamica Unidad 2Documento4 páginasEjercicios Termodinamica Unidad 2Anyela LiliCaAún no hay calificaciones
- Manual de CalidadDocumento33 páginasManual de Calidadliz zuñigaAún no hay calificaciones
- 4.2 Indices de Capacidad PDFDocumento22 páginas4.2 Indices de Capacidad PDFMoni ArguetaAún no hay calificaciones
- Gp535u Avance N°1 - Medina Rodriguez Henry RayDocumento3 páginasGp535u Avance N°1 - Medina Rodriguez Henry RayelpadreAún no hay calificaciones
- Lectura 3 Aprovechamiento de WBS Durante Un Proyecto ÁgilDocumento4 páginasLectura 3 Aprovechamiento de WBS Durante Un Proyecto ÁgilBryam Martensen GuillenAún no hay calificaciones
- QFD Dental MetrpoliDocumento3 páginasQFD Dental MetrpoliEdw Alonso Cedrón CayetanoAún no hay calificaciones
- Informe de Laboratorio TermodinámicaDocumento12 páginasInforme de Laboratorio TermodinámicaLuis Angeles Díaz100% (1)
- Ejemplo 9Documento17 páginasEjemplo 9MERYAún no hay calificaciones
- ManualDocumento21 páginasManualmauricio ceballosAún no hay calificaciones
- Enfoque Sistémico de La Ingeniería IndustrialDocumento10 páginasEnfoque Sistémico de La Ingeniería IndustrialRobert BerriosAún no hay calificaciones
- Por Qué Un Ciclista Acelera Al Ir Pendiente AbajoDocumento2 páginasPor Qué Un Ciclista Acelera Al Ir Pendiente Abajo210275 NORBERTO S�NCHEZ ALCAL�Aún no hay calificaciones
- Tarea 4 - Calor y La Primera Ley de La TermodinámicaDocumento8 páginasTarea 4 - Calor y La Primera Ley de La TermodinámicaD Saul P SandovalAún no hay calificaciones
- Estado de Equilibrio TermodinámicoDocumento2 páginasEstado de Equilibrio TermodinámicoCecilio Díaz GijónAún no hay calificaciones