El documento describe el control proporcional, donde la salida del controlador es directamente proporcional al error entre la variable de proceso y el punto de consigna. Explica que la ganancia proporcional determina cuánto afecta el error a la salida, y que un controlador de acción directa aumenta la salida para reducir un error positivo, mientras que uno de acción inversa lo reduce. También cubre conceptos como perturbaciones, estado estacionario, y el uso de un sesgo para mejorar el rendimiento.
0 calificaciones0% encontró este documento útil (0 votos)
22 vistas20 páginas
El documento describe el control proporcional, donde la salida del controlador es directamente proporcional al error entre la variable de proceso y el punto de consigna. Explica que la ganancia proporcional determina cuánto afecta el error a la salida, y que un controlador de acción directa aumenta la salida para reducir un error positivo, mientras que uno de acción inversa lo reduce. También cubre conceptos como perturbaciones, estado estacionario, y el uso de un sesgo para mejorar el rendimiento.
El documento describe el control proporcional, donde la salida del controlador es directamente proporcional al error entre la variable de proceso y el punto de consigna. Explica que la ganancia proporcional determina cuánto afecta el error a la salida, y que un controlador de acción directa aumenta la salida para reducir un error positivo, mientras que uno de acción inversa lo reduce. También cubre conceptos como perturbaciones, estado estacionario, y el uso de un sesgo para mejorar el rendimiento.
El documento describe el control proporcional, donde la salida del controlador es directamente proporcional al error entre la variable de proceso y el punto de consigna. Explica que la ganancia proporcional determina cuánto afecta el error a la salida, y que un controlador de acción directa aumenta la salida para reducir un error positivo, mientras que uno de acción inversa lo reduce. También cubre conceptos como perturbaciones, estado estacionario, y el uso de un sesgo para mejorar el rendimiento.
Descargue como PPTX, PDF, TXT o lea en línea desde Scribd
Descargar como pptx, pdf o txt
Está en la página 1/ 20
Control proporcional
Por tanto, nosotros podríamos generalizar la
acción proporcional de este mecanismo para describir cualquier forma de controlador donde la salida es una función directa de la variable proceso (PV) y el setpoint (SP): Control proporcional
m = Kp*e + b Donde: m = Salida del controlador e = Error (diferencia entre PV y SP) Kp = ganancia proporcional B = bias
Un nuevo termino se presenta en la ecuación anterior “e”, El error o la diferencia entre la variable proceso y el setpoint. El error puede puede ser calculado como:
SP-PV el controlador debe producir una acción de incremento en la señal de salida en respuesta a un incremento en la variable de proceso (acción “directa”),
PV- SP el controlador debe producir una acción de disminución de la señal de la salida en respuesta a un incremento en la variable de proceso (acción “inversa”): PV- SP Control proporcional
m = Kp*(PV-SP) + b (controlador proporcional m = Kp*(SP-PV) + b (controlador
de accion directa) proporcional de accion inversa)
CUANDO UN CONTROLADOR SE DICE QUE ES DE ACCION DIRECTA O INVERSA IMPLICA La acción que va a hacer la variable del proceso ( PV) por lo tanto la señal de salida de un controlador de acción directa van en la misma dirección que la señal de PV
y la salida de un controlador de acción inversa van en dirección contraria a la dirección de la señal PV. CONTROL PROPORCIONAL
Acción inversa: un incremento en la válvula
De flujo de vapor y una temperatura mas alta el controlador al haber incremento de temperatura, resulta en un decremento en la señal de salida (menos vapor) para controlarla
Una vez calculado el error el controlador multiplica la señal de error por
una constante llamada Kp ganancia, la cual es programada dentro del controlador, el resultado mas una señal llamada “ bias “ es la señal de salida del controlador Ejemplo control proporcional
Valvula de entrada ae apertura de entrada de 0 -100 %
Valvula de salida as apertura fija saldrá un fluido constante Sensor de nivel informara al controlador Controlador (IC) recibe el set point Manda la señal a un convertidor de corriente a presión la cual Activa la valvula de presión de entrada ae
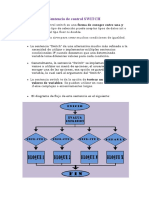
Lazo cerrado de este sistema
PROCESO= Tanque C = controlador (ic) Y(t) = la señal que esta dando el sensor de nivel r(t) =referencia que estamos inyectando en el set point e (t) = la diferencia entre el set point r(t) y la señal del sensor nivel y(t) u(t)= convertidor de corriente sale a la valvula y altera mi proceso Señal de salida u(t) es la ganancia proporcional por el error e(t)
ae=la acción de control seria la apertura de la valvula,
Kp = multiplicado por la ganancia proporcional que le pongo al controlador multiplica por (Hr –H) = la diferencia entre Hr = altura de referencia es el set point indica cuanta altura deseo yo obtener en el tanque y H la altura o nivel actual que tengo Si la señal de e(t) el error es Muy grande el nivel del tanque Es muy bajo
Implica la señal de control va a mandar abrir toda la valvula
Si la señal de e(t) el error es muy bajo el nivel del tanque muy cerca al set point
La válvula comenzara a cerrarse cada vez que la señal de error
Comience a disminuir. El error es cero la válvula permanecerá cerrada al Contrario un error muy grande la válvula permanecerá Abierta
Banda proporcional indica cuanta acción tengo yo con mi
Controlador proporcional para influir en mi proceso Cuando Kp es muy grande hara Que la valvula comience a abrir Muy rápido
Cuando la valvula queda abierta no
Hay posibilidad de inyectar energía al Proceso y queda sin control Cuando disminuyo la proporción Cuando implemento una perturbación
Se involucra Q que es la alteración
Con la ecuación diferencial
Donde la salida del proceso y(t) es h
K/Ts+1 es la función de transferencia Kq = ganancia de la avertura de salida as K es la ganancia y Kp es el controlador Estado estacionario el nivel dentro Del tanque se mantiene en un nivel Fijo
La función de transferencia estará
Representado por C el controlador kp Por el proceso que será en estado esta cionario la ganancia K Kq es la ganancia de la perturbación En el caso valvula as y Kp es nuestro Controlador
Al eliminar la perturbación con un kp
grande Afecta la banda proporcional y la valvula Estaria abre y cierra cada rato Que es el bias A la salida del control Proporcional hay una suma Con el bias este es un numero Manual que se pueden programar En los controladores con el fin de Ayudara a minimizar el error de este Control proporcional
Controladores El control proporcional no alcanzaba a dejar en cero y llegar Al set point y para corregirlo terminábamos sumando un Bias que se programaba manualmente al controlador
Cambio de la grafica del proceso entre variable proceso
Y salida del controlador debido a la perturbación se Genera un desplazamiento en la variable del proceso Se le llama offset Cambiamos el tipo de valvula por la De las siguientes características
Valvula anterior valvula neumática
Accionada por controlador propor cional . Mueve y mantiene el vástago de la valvula En una avertura fija Cuando son iguales el motor dejara de funcionar Pero la valvula permanecerá en la posición ultima Y no quedara cerrada como en el caso proporcional Que permite que nuestro nivel permanezca fijo en el Interior del tanque