2241
Features of the stress field at the surface
of a flush shrink-fit shaft
R J H Paynter1∗ , D A Hills1 , and J R Barber2
1
Department of Engineering Science, University of Oxford, Oxford, UK
2
Department of Mechanical Engineering, University of Michigan, Ann Arbor, Michigan, USA
The manuscript was received on 20 October 2008 and was accepted after revision for publication on 6 April 2009.
DOI: 10.1243/09544062JMES1403
Abstract: The state of stress induced by a shrink-fitted circular shaft in an elastically similar
half-space, positioned so that the end of the shaft is flush with the remainder of the free surface,
is studied. At deep interior points the classical plane strain (Lamé) solution obtains, and the
transition to the free surface state is found. It is found that a residual interfacial axial shear
develops and the coefficient of friction needed to ensure adhesion along the interface is found.
The effect of slip when a lower coefficient of friction is present is also found as a solution to an
integral equation.
Keywords: shrink fit, end-effects, Lamé solution
1
INTRODUCTION
The shrink fit remains a standard, reliable way of
fastening substantial wheels and other fittings onto
shafts, and is frequently used. The usual way of deciding the degree of interference required is to use
the plane Lamé ‘thick cylinder’ calculation, found in
many undergraduate textbooks (see for example, reference [1]), and which explicitly gives the connection
between the amount of interference and the contact
pressure produced. An estimate of the minimum coefficient of friction at the interface is also needed in
order to permit the driving torque, which may be transmitted to be estimated. Because the Lamé solution is
strictly two-dimensional in nature it can only be used,
accurately, under conditions of transverse plane strain
(i.e. well away from any free surface) and the question
of how end effects might lead to a modification of the
interface pressure, and hence introduce the possibility of slip and attendant fretting, arises. In this article,
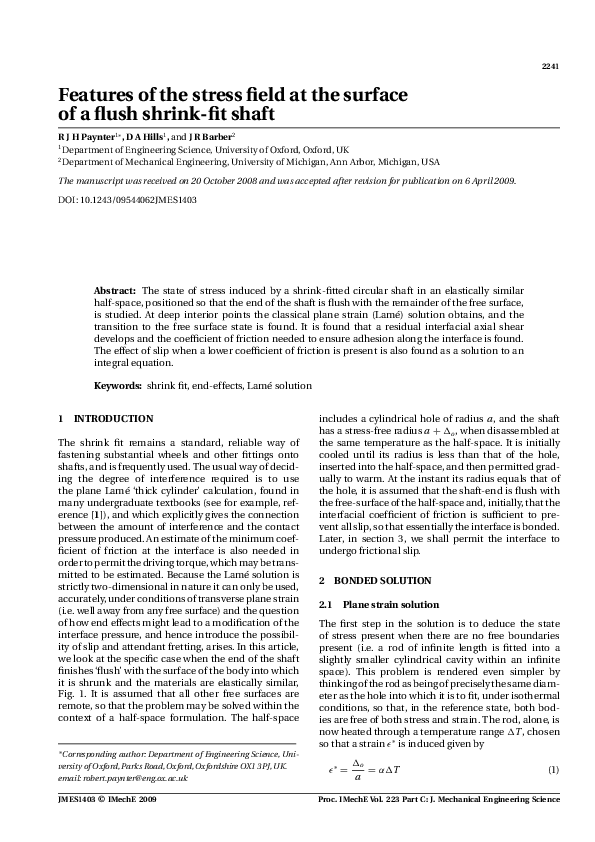
we look at the specific case when the end of the shaft
finishes ‘flush’ with the surface of the body into which
it is shrunk and the materials are elastically similar,
Fig. 1. It is assumed that all other free surfaces are
remote, so that the problem may be solved within the
context of a half-space formulation. The half-space
∗ Corresponding
includes a cylindrical hole of radius a, and the shaft
has a stress-free radius a + �o , when disassembled at
the same temperature as the half-space. It is initially
cooled until its radius is less than that of the hole,
inserted into the half-space, and then permitted gradually to warm. At the instant its radius equals that of
the hole, it is assumed that the shaft-end is flush with
the free-surface of the half-space and, initially, that the
interfacial coefficient of friction is sufficient to prevent all slip, so that essentially the interface is bonded.
Later, in section 3, we shall permit the interface to
undergo frictional slip.
2
BONDED SOLUTION
2.1 Plane strain solution
The first step in the solution is to deduce the state
of stress present when there are no free boundaries
present (i.e. a rod of infinite length is fitted into a
slightly smaller cylindrical cavity within an infinite
space). This problem is rendered even simpler by
thinking of the rod as being of precisely the same diameter as the hole into which it is to fit, under isothermal
conditions, so that, in the reference state, both bodies are free of both stress and strain. The rod, alone, is
now heated through a temperature range �T , chosen
so that a strain ǫ ∗ is induced given by
author: Department of Engineering Science, Uni-
versity of Oxford, Parks Road, Oxford, Oxfordshire OX1 3PJ, UK.
email: robert.paynter@eng.ox.ac.uk
JMES1403 © IMechE 2009
ǫ∗ =
�o
= α�T
a
(1)
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
�2242
R J H Paynter, D A Hills, and J R Barber
surface of the shaft, urs (a), is given by
1
urs
= ǫθs θ = [−p1 (1 − ν) + νp2 ] + ǫ ∗
a
E
(5)
and the unknown axial pressure is found from the
plane strain condition, i.e.
s
0 = ǫzz
=
Fig. 1
Geometry plug of radius a, in a half-space z > 0
where α is the coefficient of thermal expansion and
this generates a state of stress within the assembly. As
there are no gradients in the z direction, a state of plane
strain exists, and hence ǫzz = 0 in both bodies. Exterior
to the rod, the state of stress, from Lamé’s solution, is
given by
2
σrr
σθ θ
a
=−
=− 2,
p1
p1
r
r�a
(2)
where p1 is the interfacial contact pressure between
the rod and the cavity wall, and it will be noted that,
even under plane strain, because the material is under
pure shear, σzz = 0. The radial displacement at the
bore, urh (a), is given by
p1 (1 + ν)
urh
= ǫθhθ =
a
E
(3)
where ν is the Poisson’s ratio and E is the Young’s modulus. Turning to the shaft, we know that, because of the
pressure associated with contact with the bore, p1 , this
suffers a constant state of stress everywhere, given by
σrr
σθ θ
=
= −1
p1
p1
(4)
Suppose that it is also subject to a constant axial pressure, σzzs = −p2 , so that the radial displacement of the
1
[−p2 + 2νp1 ] + ǫ ∗
E
(6)
while continuity in the radial direction requires that
urs (a) = urh (a) (i.e. equations (3) and (5)) mean that
2p1 = p2 = −σzz =
Eǫ ∗
1−ν
(7)
and thus
⎧
1
⎪
⎪
⎨− 2
σrr (1 − ν)
=
2
⎪
Eǫ ∗
⎪
⎩− a
2r 2
r�a
(8)
r>a
We will use σo = Eǫ ∗ /(1 − ν), the axial stress, as a
reference value in subsequent normalization.
2.2 Disc of pressure
Now introduce a free surface, along the plane z = 0.
There are no shear tractions anywhere along this
plane, and the direct traction already vanishes when
r > a. It therefore remains only to cancel the disc of
constant pressure, p2 , present on r � a.
This stress field has been found by first finding
the Papkovich–Neuber potential function for an axial
traction with uniform distribution on an internal circular disc in a full-space, as presented by Paynter
et al. [2]. This solution was then transformed, by means
of a method developed by Aderogba [3], to a halfspace problem with the disc of pressure set at the
surface; the resulting formulae are presented in reference [4] in terms of Lipschitz–Hankel integrals which
may, in turn, be given in terms of complete elliptic
integrals. The two stress components relevant to this
investigation are
⎡
σrr (a, r, z)
z
⎢
[2ar(2 − k 2 )(3 − 2ν) − k 2 r 2 (3 + 2ν) + a 2 k 2 (1 − 2ν)]K(k 2 )
= −⎣ √
p2
4π akr 5/2
z
{k 2 r − 2a(3 − 2ν)(r 2 + z 2 ) − 2a 3 (3 − 2ν) − a 2 r(k 2 − 12 + 8ν)}E(k 2 )
√
2
a(a − 2ar + r 2 + z 2 )
⎧
⎤
1 + 2ν
⎪
⎪
r < a⎥
⎨
2
2
kz[r (1 + 2ν) + a (1 − 2ν)] r − a
2
⎥
�(h, k 2 ) +
+
√
⎦
5/2
⎪ a 2 (1 − 2ν)
r +a
4πr
a
⎪
⎩−
r
>
a
2r 2
�
2
2
σrz (a, r, z)
z
(k − 2)
2
2
=−
E(k ) − K(k )
p2
2πr (a + r)2 + z 2 (k 2 − 1)
+
2πr 3/2 k
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
(9)
(10)
JMES1403 © IMechE 2009
�Features of the stress field at the surface of a flush shrink-fit shaft
Fig. 2
Contours of stress fields, adhered case: (a) radial stress and (b) shear stress
where
k=
�
h=
4ar
(r + a)2
4ar
,
(r + a)2 + z 2
k′ =
1 − k2
(11)
and K (·), E(·), and �(·) are, respectively, the complete
elliptic integrals of the first, second, and third kinds
[5]. It may be noted that the term including �(h, k 2 )
is discontinuous across r = a, but this discontinuity is
removed by the final term in the expression for σrr .
2.3 Overall solution
The overall solution for the fully adhered plug is thus
the sum of the effect expansion (equation (8)), minus
the corrective term for pressure at the free surface
(equations (9) and (10)). The contour plots in Fig. 2
show the overall radial and shear stress fields. In this
and all other example evaluations a Poisson’s ratio of
0.3 has been used.
The state of stress is smooth and continuous everywhere, except where the interface meets the surface
where an interesting feature arises. There is a discontinuity in the radial stress given by
�
σrr (1 − ν) ��
Eǫ ∗ �
z=0
=
⎧
⎪
⎨ν
The shear stress σrz on the surface r = a tends to a
non-zero limit as z → 0, though the complementary
shear stress σzr is of course zero at this point since
the surface z = 0 is traction-free. In fact the stress
field, though everywhere bounded, has an unbounded
derivative at (a, 0) and the values of the stress components obtained at that point depend on the inclination
of the line along which it is approached (see Barber [6],
section 11.1).
Note that these discontinuities arise only strictly at
the point (a, 0) and at all other points the stress is
continuous. The radial stress is plotted as a function
of radius in Fig. 3 at the surface (z = 0), under plane
strain conditions (z = ∞) and for a selection of depths
(z/a = 1/20, 1/4, 1). Note that the radial stress at the
surface on the shaft end is tensile for positive values of
Poisson’s ratio (see equation (12)). Although the stress
gradients are severe at the surface, at depths of greater
than two diameters the stresses tend to their plane
strain values.
r<a
2
⎪
⎩− a (1 − ν) r > a
r2
(12)
The magnitude of the discontinuity is equal to the axial
stress in the shaft at infinite depth.
JMES1403 © IMechE 2009
2243
Fig. 3
Radial stress versus radial position. At the surface (z = 0), plane strain (z = ∞), and at example
depths: z/a = a/20, a/4, 1
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
�2244
R J H Paynter, D A Hills, and J R Barber
For analysis of the shaft or plug we are most interested in the stress arising along the interface (r = a),
which is given by
�
σrr (1 − ν) ��
Eǫ ∗ �
r=a
� 2
z
[4a (1 − 2ν) + z 2 (3 − 2ν)]K(k 2 )
√
2a 2 π 4a 2 + z 2
�
1
(13)
−[2a 2 (5 − 4ν) + z 2 (3 − 2ν)]E(k 2 ) + ν −
2
�
σrz (1 − ν) ��
1
[z 2 K(k 2 )
=
√
�
∗
2 + z2
Eǫ
aπ
4a
r=a
=
− (2a 2 + z 2 )E(k 2 )]
(14)
The values at the surface found by approaching along
this line are given by these formulae and then take the
limit z → 0, which gives
�
σrr (1 − ν) ��
1
=ν−
�
∗
Eǫ
2
r=a,z=0
�
1
σrz (1 − ν) ��
=
Eǫ ∗ �r=a,z=0
π
(15)
(16)
which, for the radial stress, is the average of the values
either side of the discontinuity (equation (12)).
This represents the complete solution to the problem, providing only that the coefficient of friction f
is sufficient to maintain conditions of stick throughout the interface, in other words, that the traction
ratio |σrz |/(−σrr ) does not exceed f anywhere along the
interface. This ratio and the individual traction components are presented in Fig. 4 as a function of depth
along the interface. It may be seen that the most critical point is just below the surface, where, for ν = 0.3,
the maximum lies at z/a = 0.0227, and the ratio equals
−1.616 whereas, at the surface, it is −1.592. Of course,
for practical values of friction coefficient the interface
would slip.
Fig. 4
3
FRICTIONAL SLIP
When the coefficient of friction is insufficient to maintain complete adhesion, a region of slip will develop,
whose extent we wish to find. In order to do this we will
deploy an array of glide dislocations along the slipping interface, to restore the Coulomb condition. A
prerequisite is a knowledge of the state of stress within
a half-space because of a dislocation loop, of radius
a, having a Burgers vector in the z direction, of magnitude bz , and positioned at (a, d). The path cut must
lie along the line of slip (i.e. lie along the cylindrical
surface r = a, 0 � z � d) and a solution to this problem has recently been found [4]. We therefore know
the functions z Gri (ζ , z), defined by
σri (z) = z Gri (ζ , z)bz (ζ ),
i = r, z
(17)
and hence can write down the following two integral
equations describing the tractions along the interface as
�∞
0
(18)
σrr (z) = σrr (z) +
z Grr (ζ , z)Bz (ζ )dz
0
σrz (z) = σrz0 (z) +
�∞
z Grz (ζ , z)Bz (ζ )dz
(19)
0
where σrj0 is the fully stuck (or bilateral) solution given
above and Bz (·) represents the dislocation density,
(= dbz /dz). If the slip region penetrates to a depth c,
and the coefficient of interfacial friction is f , along the
interface we know that
0�z�c
σrz (z) = −f σrr (z),
(20)
and hence we arrive at the following singular integral
equation, in terms of the dislocation density
σrz0 (z)
−f
σrr0 (z)
=
�c
0
[z Grz (ζ , z) − f z Grr (ζ , z)]Bz (ζ )dz
(21)
A ‘bounded both ends’ solution is required for the dislocation density, and this provides the additional side
Stresses at the interface radius (r = a) versus depth z/a. Adhered solution: (a) pressure and
shear and (b) traction ratio |σrz |/(−σrr )
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
JMES1403 © IMechE 2009
�Features of the stress field at the surface of a flush shrink-fit shaft
Fig. 5
Friction coefficient for a given slip length
condition needed to establish consistent values of the
friction coefficient for a given extent of slip, c/a. The
integral equation is treated using a Gauss–Chebyshev
numerical quadrature appropriate to this type of kernel, a detailed description of which may be found in
reference [7]. This quadrature gives greatest detail to
the ends of the integration interval, as required in our
problem that exhibits high gradients of stress at the
surface and at the point of stick-slip transition.
3.1 Results with slip
The main result is the relationship between depth to
which slip penetrates and the coefficient of friction.
This is shown in Fig. 5, with each point representing
a solution of the integral equation (equation (21)). As
Fig. 6
Fig. 7
2245
would be expected the length of the slip zone increases
with reducing friction coefficient.
Specific examples are given to show the tractions
along the interface. In Fig. 6, with a friction coefficient
of 1.0, the slip extends to 0.674a. There is little effect
on the overall radial stress distribution, with only a
small reduction in the magnitude. The shear in the slip
zone is affected substantially in the slipping region as
it is constrained to follow the form of the radial stress
(equation (20)) to the point of transition to stick. The
peak shear traction now occurs here instead of at the
surface.
With a friction coefficient of 0.3 (Fig. 7) the slip
extends to 3.31a. There is a significant reduction in
the radial stress well within the half-space, but near
the surface there is an increase in radial pressure. The
plots in Fig. 8 show the radial and shear stress fields
in this case; the shift of the concentration of shear
stress is clear and the magnitude has decreased (note
the contour labels). The magnitude of the radial stress
anomaly at the surface has decreased, such that the
surface is now in compression.
At very low coefficients of friction the modification
of the radial pressure by slip is marked. It is easy to find
the limiting relationship for a vanishingly small coefficient of friction analytically, by setting the axial stress
p2 in equation (5) to zero, whereupon the relationship
between the interfacial contact pressure and dimensionless interference is seen to be given by σrr /σo =
−(1 − ν)/2, and, of course, this solution is exact at all
Friction coefficient = 1.0 and slip length = 0.674 (dashed lines show bilateral adhered
solution). (a) Radial pressure and (b) shear traction
Friction coefficient = 0.3 and slip length = 3.31a. (a) Radial pressure, (b) shear traction
JMES1403 © IMechE 2009
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
�2246
R J H Paynter, D A Hills, and J R Barber
Fig. 8
Fig. 9
Contours of stress fields: friction coefficient = 0.3 and slip length = 3.31a. (a) Radial stress
and (b) shear stress
Friction coefficient = 0.0233 and slip length =
50a (dashed lines show bilateral adhered solution). Radial pressure
depths within the half-space. In Fig. 9, the slip zone
was set to 50a and the corresponding friction coefficient found to be 0.0233. The radial pressure tends to
the limiting value of the frictionless case at the surface,
namely 0.35σo for ν = 0.3. A small, finite coefficient
of friction fixes the depth at which the axial displacements of the shaft and pocket are fixed, and hence
the projection of the shaft when the strain is relaxed
may be found. For mild steel (E = 210 GPa, ν = 0.3,
and σY = 300 MPa), which remains elastic ǫ ∗ cannot
exceed about 10−3 so that the plug would protrude
by about a/20, and the ‘flush surface’ idealization is
justified.
the radial stress is not uniquely defined, but depends
on the direction of approach. Immediately external to
the shaft the radial stress is given by σrr /σo = −(1 − ν),
and immediately inside it is given by σrr /σo = ν (i.e. it
is in tension).
The practical implication of this result is that the
contact pressure will fall off towards the free end, by
an amount dependent on the coefficient of friction,
and with a lower bound given by the second of the
equations just quoted (i.e. for a material having a Poisson’s ratio of 0.3, to 40 per cent of the plane strain
value). This contrasts with the value implied by a naive
assumption of plane stress which incorrectly implies
an increase in local contact pressure to 142 per cent of
the plane strain value. In absence of external loading
the coefficient of friction would have to exceed about
1.6 to eliminate completely all axial slip. In most practical cases slip will most certainly ensue and depth of
penetration of slip is quite marked. For example if the
coefficient of friction is only 0.3 axial slip will penetrate to as far as just over three times the plug radius.
Even the coefficient of friction is as high as one the
slip extends to about 0.67 of the plug radius. The presence of external load can be expected to extend slip
further but this cannot easily be quantified within this
formulation.
REFERENCES
4
CONCLUSIONS
The variation of radial contact stress arising between
an elastic cylindrical shaft and a slightly undersized
hole in an elastically similar half-space has been
found. The stress field is unusual insofar as at the
point where the interface comes to the free surface
1 Zhang, L. Solid mechanics for engineers, 2001 (Palgrave,
Basingstoke, UK).
2 Paynter, R. J. H., Hills, D. A., and Korsunsky, A. M. The
effect of path cut on Somigliana ring dislocation elastic
fields. Int. J. Solids Struct., 2007, 44, 6653–6677.
3 Aderogba, K. Eigenstresses in a semi-infinite solid. Math.
Proc. Camb. Philos. Soc., 1976, 80, 555–562.
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
JMES1403 © IMechE 2009
�Features of the stress field at the surface of a flush shrink-fit shaft
4 Paynter, R. J. H. and Hills, D. A. The effect of path cut on
Somigliana ring dislocation elastic fields in a half-space.
Int. J. Solids Struct., 2009, 46, 412–432.
5 Abramowitz, M. and Stegun, I. A. Handbook of mathematical functions, 1964 (Dover Publications Inc., New York,
USA).
6 Barber, J. R. Elasticity, 2002 (Kluwer Academic Publishers,
Dordrecht, The Netherlands).
7 Hills D. A., Kelly, P. A., Dai, D. N., and Korsunsky, A. M.
Solution of crack problems; the distributed dislocation
technique, 1996 (Kluwer Academic Publishers, Dordrecht,
The Netherlands).
Notation
E
f
h, k
Jμ,ν;λ
K(k 2 ), E(k 2 ),
�(h, k 2 )
p1 , p2
r, z
ur
α
�o
APPENDIX
a
Bz
Gri
radius of shaft
axial ring dislocation
density
Young’s modulus
coefficient of friction
JMES1403 © IMechE 2009
ǫ∗
ǫzz , ǫθθ
ν
σrr , σzz ,
σθθ , σrz
2247
stress influence functions of ring
dislocations
arguments of elliptic integrals
Lipschitz–Hankel function
complete elliptic integrals of the
first, second, and third kind
radial and axial pressure in the shaft
of the plane strain solution
radial and axial axisymmetric
cylindrical coordinates
radial displacement
coefficient of thermal expansion
interference of shaft and hole at
equal temperature
thermal or misfit strain
axial and tangential strain
Poisson’s ratio for the elastic
material (=0.3 in example
calculations)
radial, axial, tangential, and shear
stress
Proc. IMechE Vol. 223 Part C: J. Mechanical Engineering Science
�
 Robert Paynter
Robert Paynter