MULTIMODAL LANGUAGE PROCESSING FOR MOBILE INFORMATION ACCESS
Michael Johnston, Srinivas Bangalore, Amanda Stent, Gunaranjan Vasireddy, Patrick Ehlen
AT&T Labs-Research
180 Park Ave, Florham Park, NJ 07932
johnston, srini, stent, guna, ehlen�@research.att.com
ABSTRACT
Interfaces for mobile information access need to allow users flexibility in their choice of modes and interaction style in accordance
with their preferences, the task at hand, and their physical and
social environment. This paper describes the approach to multimodal language processing in MATCH (Multimodal Access To
City Help), a mobile multimodal speech-pen interface to restaurant
and subway information for New York City. Finite-state methods
for multimodal integration and understanding enable users to interact using pen, speech, or dynamic combinations of the two, and
a speech-act based multimodal dialogue manager enables mixedinitiative multimodal dialogue.
1. LANGUAGE PROCESSING FOR MOBILE SYSTEMS
Mobile information access devices (PDAs, tablet PCs, next generation phones) offer limited screen real estate and no keyboard or
mouse, making complex graphical interfaces cumbersome. Multimodal interfaces can address this problem by enabling speech
and pen input and output combining synthetic speech and graphics (See [1] for a detailed overview of previous work on multimodal input and output). Furthermore, since mobile devices are
used in situations involving different physical and social environments, tasks, and users, they need to allow users to provide input
in whichever mode or combination of modes are most appropriate
given the situation and the user’s preferences.
Our testbed multimodal application MATCH (Multimodal Access To City Help) allows all commands to be expressed either by
speech, by pen, or multimodally. This is achieved by capturing
the parsing, integration, and understanding of speech and gesture
inputs in a single multimodal grammar which is compiled into a
multimodal finite-state device. This device is tightly integrated
with a speech-act based multimodal dialog manager enabling users
to complete commands either in a single turn or over the course of
a number of dialogue turns. In Section 2 we describe the MATCH
application. In Section 3, we describe the multimodal language
processing architecture underlying MATCH.
2. THE MATCH APPLICATION
Urban environments present a complex and constantly changing
body of information regarding restaurants, cinema and theatre schedules, transportation topology, and timetables. This information is
most valuable if it can be delivered effectively while mobile, since
users needs change while they are out and the information itself is
dynamic (e.g. train times change and shows get cancelled).
Thanks to AT&T labs and DARPA ITO (contract No. MDA972-99-30003) for financial support.
MATCH is a working city guide and navigation system that
enables mobile users to access restaurant and subway information
for New York City (NYC). MATCH runs standalone on a Fujitsu
pen computer, yet can also run in client-server mode across a wireless network. The user interacts with a graphical interface displaying restaurant listings and a dynamic map showing locations and
street information (the Multimodal UI). They are free to give commands or reply to requests using speech, by drawing on the display with a stylus, or using synchronous multimodal combinations
of the two modes. For example, they can request to see restaurants using the spoken command show cheap italian restaurants
in chelsea. The system will then zoom to the appropriate map
location and show the locations of restaurants on the map. Alternatively, they could give the same command multimodally by circling an area on the map and saying show cheap italian restaurants
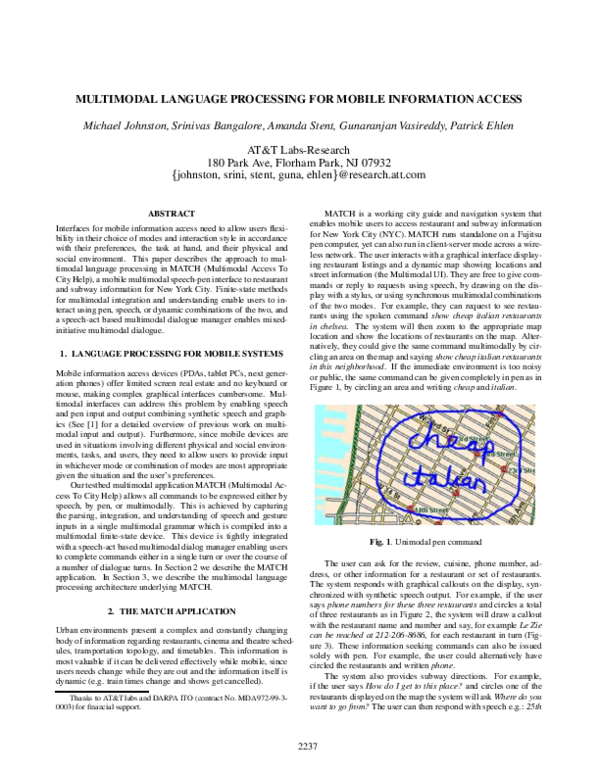
in this neighborhood. If the immediate environment is too noisy
or public, the same command can be given completely in pen as in
Figure 1, by circling an area and writing cheap and italian.
Fig. 1. Unimodal pen command
The user can ask for the review, cuisine, phone number, address, or other information for a restaurant or set of restaurants.
The system responds with graphical callouts on the display, synchronized with synthetic speech output. For example, if the user
says phone numbers for these three restaurants and circles a total
of three restaurants as in Figure 2, the system will draw a callout
with the restaurant name and number and say, for example Le Zie
can be reached at 212-206-8686, for each restaurant in turn (Figure 3). These information seeking commands can also be issued
solely with pen. For example, the user could alternatively have
circled the restaurants and written phone.
The system also provides subway directions. For example,
if the user says How do I get to this place? and circles one of the
restaurants displayed on the map the system will ask Where do you
want to go from? The user can then respond with speech e.g.: 25th
2237
�Fig. 2. Two area gestures
Fig. 5. MATCH Multimodal architecture
Fig. 3. Phone query callouts
The output from the recognition server is a lattice of possible word
string hypotheses with associated costs. This lattice is passed to
the multimodal integrator (MMFST).
3.2. Recognizing and Representing Electronic Ink
The multimodal architecture which supports MATCH consists of
a series of agents which communicate through a Java-based facilitator MCUBE (Figure 5). We focus in this paper on multimodal
input processing: the handling and representation of speech and
electronic ink, their integration and interpretation, and the multimodal dialogue manager. [2] presents an experiment on text planning within the MATCH architecture. [3] describes the approach
to mobile multimodal logging for MATCH.
Just as we determine a lattice of possible word strings for the audio
signal in the speech mode, similarly for the gesture mode we need
to generate a lattice of possible classifications and interpretations
of the electronic ink. A given sequence of ink strokes may contain
symbolic gestures such as lines and arrows, handwritten words,
and selections of entities on the display.
When the user draws on the map, their ink is captured and any
objects potentially selected, such as currently displayed restaurants
or subway stations, are determined. The electronic ink is broken
into a lattice of strokes and passed to the gesture recognition and
handwriting recognition components to determine possible classifications of gestures and handwriting in the ink stream. Recognitions are performed both on individual strokes and combinations of
strokes in the ink stroke lattice. For MATCH, the handwriting recognizer supports a vocabulary of 285 words, including attributes of
restaurants (e.g. ‘chinese’,‘cheap’) and zones and points of interest
(e.g. ‘soho’,‘empire’,‘state’,‘building’). The gesture recognizer
recognizes a set of 10 basic gestures, including lines, arrows, areas, points, and question marks. It uses a variant of Rubine’s classic template-based gesture recognition algorithm [4] trained on a
corpus of sample gestures. In addition to classifying gestures, the
gesture recognition component also extracts features such as the
base and head of arrows. The gesture and handwriting recognition
components enrich the ink stroke lattice with possible classifications of strokes and stroke combinations, and pass this enriched
stroke lattice back to the Multimodal UI. The Multimodal UI then
takes this classified stroke lattice and the selection information and
builds a lattice representation of all the possible interpretations of
the user’s ink, which it passes to MMFST.
3.1. Speech Input Handling
3.2.1. Representation of Complex Pen-based Input
In order to provide spoken input, the user must hit a click-to-speak
button on the Multimodal UI. We found that in an application such
as MATCH which provides extensive unimodal pen-based interaction, it was preferable to use click-to-speak rather than pen-tospeak or open-mike. With pen-to-speak, spurious speech results
received in noisy environments can disrupt unimodal pen commands. The click-to-speak button activates a speech manager running on the device which gathers audio and communicates with
a recognition server (AT&T’s Watson speech recognition engine).
The representation of pen input in MATCH is significantly more
involved than in our earlier approach to finite-state multimodal
language processing [5, 6], in which the gestures were sequences
of simple deictic references to people (Gp) or organizations (Go).
The interpretations of electronic ink are encoded as symbol complexes of the following form G FORM MEANING (NUMBER TYPE)
SEM. FORM indicates the physical form of the gesture and has
values such as area, point, line, arrow. MEANING indicates the
meaning of that form; for example an area can be either a loc(ation)
Street and 3rd Avenue, with pen by writing e.g. 25th St & 3rd Ave,
or multimodally: e.g. from here (with a circle gesture indicating
the location). The system then calculates the optimal subway route
and dynamically generates a multimodal presentation indicating
the series of actions the user needs to take (Figure 4).
Fig. 4. Multimodal subway route
3. MULTIMODAL LANGUAGE PROCESSING
2238
�or a sel(ection). NUMBER and TYPE indicate the number of entities in a selection (1,2,3, many) and their type (rest(aurant), theatre). SEM is a place holder for the specific content of the gesture,
such as the points that make up an area or the identifiers of objects in a selection (e.g. id1, id2). For example, if as in Figure 2,
the user makes two area gestures, one around a single restaurant
and the other around two restaurants, the resulting gesture lattice
will be as in Figure 6. The first gesture (node numbers 0-7) is
either a reference to a location (loc.) (0-3,7) or a reference to a
restaurant (sel.) (0-2,4-7). The second (nodes 7-13,16) is either
a reference to a location (7-10,16) or to a set of two restaurants
(7-9,11-13,16). If the user says show chinese restaurants in this
neighborhood and this neighborhood, the path containing the two
locations (0-3,7-10,16) will be taken when this lattice is combined
with speech in MMFST. If the user says tell me about this place
and these places, then the path with the adjacent selections is taken
(0-2,4-9,11-13,16).
3.2.2. Aggregation of Gestures
When multiple selection gestures are present, an aggregation technique is employed in order to overcome the problems with deictic
plurals and numerals described in [7]. Aggregation augments the
gesture lattice with aggregate gestures that result from combining adjacent selection gestures. This allows a deictic expression
like these three restaurants to combine with two area gestures, one
which selects one restaurant and the other two, as long as their sum
is three. It avoids the need to enumerate in the multimodal grammar all of the different possible combinations of gestures deictic
numeral phrases could combine with. In our example (Figure 6),
the aggregation process applies to the two adjacent selections and
adds a selection of three restaurants (0-2,4,14-16). If the speech is
tell me about these or phone numbers for these three restaurants
then the aggregate path (0-2,4,14-16) will be chosen.
3.3. Multimodal Integration (MMFST)
The multimodal integrator (MMFST) takes the speech lattice and
the gesture interpretation lattice and builds a meaning lattice which
captures the potential joint interpretations of the speech and gesture inputs. MMFST uses a system of intelligent timeouts to work
out how long to wait when speech or gesture is received. These
timeouts are kept very short by making them conditional on activity in the other input mode. MMFST is notified when the user
has hit the click-to-speak button, when a speech result arrives, and
whether or not the user is inking on the display. When a speech lattice arrives, if inking is in progress, MMFST waits for the gesture
lattice, otherwise it applies a short timeout and treats the speech as
unimodal. When a gesture lattice arrives, if the user has hit clickto-speak MMFST waits for the speech result to arrive, otherwise it
applies a short timeout and treats the gesture as unimodal.
We use an extension of the finite-state approach to multimodal
input processing proposed by Johnston and Bangalore [5, 6]. In
this approach, possibilities for multimodal integration and understanding are captured in a three tape finite state device in which the
first tape represents the speech stream (words), the second the gesture stream (gesture symbols), and the third their combined meaning (meaning symbols). In essence, this device takes the speech
and gesture lattices as inputs, consumes them using the first two
tapes, and writes out a meaning lattice using the third tape. The
three tape FSA is simulated using two transducers: G:W, which is
used to align speech and gesture, and G W:M, which takes a composite alphabet of speech and gesture symbols as input and outputs
meaning. The gesture lattice G and speech lattice W are composed
with G:W and the result is factored into an FSA G W which is
composed with G W:M to derive the meaning lattice M (See [5, 6]
for details). In addition to more complex representation of gesture
and aggregation, we have also extended the approach with a more
general method for abstracting over specific gestural content.
3.3.1. Abstracting Over Specific Gestural Content
In order to capture multimodal integration using finite-state methods, it is necessary to abstract over specific aspects of gestural
content. For example, all the different possible sequences of coordinates that could occur in an area gesture cannot be encoded
in the FST. Our previous approach [6], was to assign the specific
content of gestures to a series of numbered variables e1, e2, e3.
This limits the number of gestural inputs that can be handled to
the number of variables used. If a large number are used, then
the resulting multimodal finite-state device increases significantly
in size. This becomes a significant problem with more complex
pen-based input and when aggregation of gestures is considered
(Section 3.2.2), since a new variable is needed for each aggregate
combination of gestures. We have developed a generalized solution to this approach using the finite-state calculus which avoids
these problems and reduces the size of the multimodal finite-state
transducer. We represent the gestural interpretation lattice as a
transducer I:G, where G are gesture symbols (including a reserved
symbol SEM) and I contains both gesture symbols and the specific
contents. I and G differ only in cases where the gesture symbol on
G is SEM, in which case the corresponding I symbol is the specific
interpretation. In order to carry out the multimodal composition
with the G:W and G W:M machines, a projection on the G output
side of I:G is used. In the multimodal FST, in any place where content needs to be copied from the gesture tape to the meaning tape
an arc eps:SEM:SEM is used. After composition we take a projection G:M of the resulting G W:M machine (basically we factor out
the speech (W) information). This is composed with the original
I:G in order to reincorporate the specific contents that had to be
left out of the finite-state process (I:G � G:M = I:M). In order to
read off the meaning we concatenate symbols from the M side. If
the M symbol is SEM we instead take the I symbol for that arc.
3.3.2. Multimodal Grammars
The multimodal finite-state transducers used at runtime are compiled from a declarative multimodal context-free grammar which
captures the structure and interpretation of multimodal and unimodal commands. This grammar captures not just multimodal integration patterns but also the parsing of speech and gesture, and
the assignment of meaning. In Figure 7 we present a small simplified fragment capable of handling commands such as phone numbers for these three restaurants. A multimodal CFG differs from
a normal CFG in that the terminals are triples: W:G:M, where W
is the speech stream (words), G the gesture stream (gesture symbols), and M the meaning stream (meaning symbols). An XML
representation for meaning is used to facilate parsing and logging
by other system components. The meaning tape symbols concatenate to form coherent XML expressions. The epsilon symbol (eps)
indicates that a stream is empty in a given terminal.
Consider the example above where the user says phone numbers for these three restaurants and circles two groups of the restaurants (Figure 2). The gesture lattice Figure 6 is turned into a transducer I:G with the same symbol on each side except for the SEM
arcs which are split. For example, path 15-16 SEM([id1,id2,id3])
becomes [id1,id2,id3]:SEM. After G and the speech W are integrated using G:W and G W:M. The G path in the result is used to
2239
�Fig. 6. Gesture lattice
S
CMD
DEICTICNP
DDETPL
RESTPL
NUM
eps:eps:�cmd� CMD eps:eps:�/cmd�
phone:eps:�phone� numbers:eps:eps
for:eps:eps DEICTICNP
eps:eps:�/phone�
DDETPL eps:area:eps eps:sel:eps
NUM RESTPL eps:eps:�restaurant�
eps:SEM:SEM eps:eps:�/restaurant�
these:G:eps
restaurants:restaurant:eps
three:3:eps
Fig. 7. Multimodal grammar fragment
re-establish the connection between SEM symbols and their specific contents in I:G (I:G G:M = I:M). The meaning read off I:M
is �cmd� �phone� �restaurant� [id1,id2,id3] �/restaurant�
�/phone� �/cmd�. This is passed to the multimodal dialog manager (MDM) and from there to the Multimodal UI where it results
in the display in Figure 3 and coordinated TTS output.
3.4. Multimodal Dialog Manager (MDM)
The MDM is based on previous work on speech-act based models of dialog [8, 9]. It uses a Java-based toolkit (MDMKit) for
writing dialog managers that embodies an approach similar to that
used in TrindiKit [10]. It includes several rule-based processes
that operate on a shared state. The state includes system and user
intentions and beliefs, a dialog history and focus space, and information about the speaker, the domain, and the available modalities.
The processes include an interpretation process, which selects the
most likely interpretation of the user’s input given the current state;
an update process, which updates the state based on the selected
interpretation; a selection process, which determines what the system’s possible next moves are; and a generation process, which
selects among the next moves and updates the system’s model of
the user’s intentions as a result.
In the route query example in Section 2, MDM first receives
a route query in which only the destination is specified How do I
get to this place?. In the selection phase it consults the domain
model and determines that a source is also required for a route. It
adds a request to query the user for the source to the system’s next
moves. This move is selected and the generation process selects
a prompt and sends it to the TTS component. The system asks
Where do you want to go from?. If the user says or writes 25th
Street and 3rd Avenue then MMFST will assign this input two possible interpretations. Either this is a request to zoom the display to
the specified location or it is an assertion of a location. Since the
MDM dialogue state indicates that it is waiting for an answer of the
type location, MDM reranks the assertion as the most likely interpretation from the meaning lattice. A generalized overlay process
[11] is used to take the content of the assertion (a location) and
add it into the partial route request. The result is determined to
be complete and passed on to the Multimodal UI, which uses uses
the SUBWAY component, multimodal generator, and TTS to determine and present the optimal route to the user.
4. CONCLUSION
In MATCH, a single multimodal grammar captures the expression
of commands in speech, pen, or multimodal combinations of the
two. We have shown here how the finite-state approach to multimodal language processing can be extended to support representation of complex pen-based gestural input, generalized abstraction over specific gestural content, and aggregation of gestures.
The finite-state multimodal integration component is integrated
with a speech-act based multimodal dialog manager, enabling dialogue context to resolve ambiguous multimodal inputs, and allowing multimodal commands to be distributed over multiple dialogue turns. This approach gives users an unpredecented level of
flexibility of interaction depending on their preferences, task, and
physical and social environment.
5. REFERENCES
[1] E. André, “Natural language in multimedia/multimodal systems,” in Handbook of Computational Linguistics, Ruslan
Mitkov, Ed. Oxford University Press, 2002.
[2] A. Stent, M. Walker, S. Whittaker, and P. Maloor, “Usertailored generation for spoken dialogue: An experiment,” in
Proceedings of ICSLP, Denver, Colorado, 2002.
[3] P. Ehlen, M. Johnston, and G. Vasireddy, “Collecting mobile
multimodal data for MATCH,” in Proceedings of ICSLP,
Denver, Colorado, 2002.
[4] D. Rubine, “Specifying gestures by example,” Computer
graphics, vol. 25, no. 4, pp. 329–337, 1991.
[5] S. Bangalore and M. Johnston, “Tight-coupling of multimodal language processing with speech recognition,” in Proceedings of ICSLP, Beijing, China, 2000.
[6] M. Johnston and S. Bangalore, “Finite-state multimodal
parsing and understanding,” in Proceedings of COLING,
Saarbrücken, Germany, 2000.
[7] M. Johnston, “Deixis and conjunction in multimodal systems,” in Proceedings of COLING 2000, Saarbrücken, Germany.
[8] A. Stent, J. Dowding, J. Gawron, E. Bratt, and R. Moore,
“The CommandTalk spoken dialogue system,” in Proceedings of ACL’99, 1999.
[9] C. Rich and C. Sidner, “COLLAGEN: A collaboration manager for software interface agents,” User Modeling and UserAdapted Interaction, vol. 8, no. 3–4, pp. 315–350, 1998.
[10] S. Larsson, P. Bohlin, J. Bos, and D. Traum, “Trindikit manual,” Tech. Rep., TRINDI Deliverable D2.2, 1999.
[11] J. Alexandersson and T. Becker, “Overlay as the basic operation for discourse processing in a multimodal dialogue system,” in 2nd IJCAI Workshop on Knowledge and Reasoning
in Practical Dialogue Systems, 2001.
2240
�
 Patrick Ehlen
Patrick Ehlen