Finite-state Methods for Multimodal Parsing and Integration
Michael Johnston
AT&T Labs - Research
Shannon Laboratory, 180 Park Ave
Florham Park, NJ 07932, USA
johnston@research.att.com
1 Introduction
Finite-state machines have been extensively applied to
many aspects of language processing including, speech
recognition (Pereira and Riley, 1997; Riccardi et al.,
1996), phonology (Kaplan and Kay, 1994; Kartunnen,
1991), morphology (Koskenniemi, 1984), chunking (Abney, 1991; Joshi and Hopely, 1997; Bangalore, 1997),
parsing (Roche, 1999), and machine translation (Bangalore and Riccardi, 2000).
In Johnston and Bangalore (2000) we showed how
finite-state methods can be employed in a new and different task - parsing, integration, and understanding of
multimodal input. Our approach addresses the particular case of multimodal input to a mobile device where the
modes are speech and gestures made on the display with
a pen, but has far broader application. The approach uses
a multimodal grammar specification which is compiled
into a finite-state device running on three tapes. This device takes as input a speech stream and a gesture stream
and outputs their combined meaning. The approach overcomes the computational complexity of unification-based
approaches to multimodal processing (Johnston, 1998),
enables tighter coupling with speech recognition, and enables straightforward composition with other kinds of language processing such as finite-state translation (Bangalore and Riccardi, 2000).
In this paper, we present a revised and updated finitestate model for multimodal language processing which incorporates a number of significant advancements to our
approach. We show how gesture symbols can be decomposed into attributes in order to reduce the alphabet of
gesture symbols and enable underspecification of required
gestures. We present a new mechanism for abstracting
over gestural content that cannot be captured in the finitestate machine.1 We address the problems relating to deictic numerals (Johnston, 2000) by introducing a new mechanism for aggregation of adjacent gestures. The examples
we use are drawn from a new more sophisticated multimodal application which provides mobile access to city
information such as the locations of restaurants and theatres (we will demonstrate this application as part of our
presentation). We will also draw examples from other
applications as needed. In addition to addressing multimodal rather than unimodal input, another novel aspect of
our approach is that we used the finite-state representation
to build the meaning representation.
We first present the basics of the finite-state approach
and then go on to discuss each of the innovations in turn.
1 This overcomes a number of difficulties with the previous buffering/variable mechanism we used.
Srinivas Bangalore
AT&T Labs - Research
Shannon Laboratory, 180 Park Ave
Florham Park, NJ 07932, USA
srini@research.att.com
2 Finite-state models for multimodal
processing
Multimodal integration involves merging semantic content from multiple streams to build a joint interpretation
for a multimodal utterance. We employ a finite-state device to parse multiple input streams and to combine their
content into a single semantic representation. For an interface with n modes, a finite-state device operating over
n+1 tapes is needed. The first n tapes represent the input
streams and n + 1 is an output stream representing their
composition. In the case of speech and pen input there
are three tapes, one for speech, one for pen gesture, and a
third for their combined meaning.
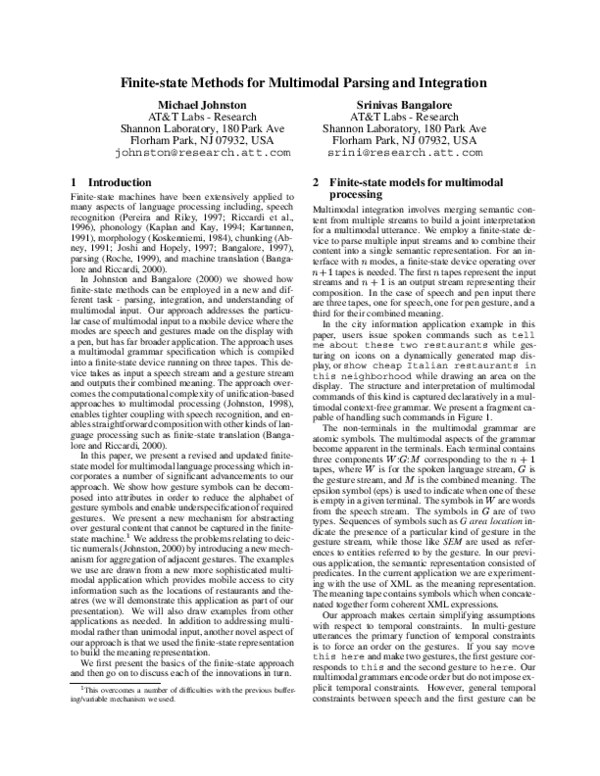
In the city information application example in this
paper, users issue spoken commands such as tell
me about these two restaurants while gesturing on icons on a dynamically generated map display, or show cheap Italian restaurants in
this neighborhood while drawing an area on the
display. The structure and interpretation of multimodal
commands of this kind is captured declaratively in a multimodal context-free grammar. We present a fragment capable of handling such commands in Figure 1.
The non-terminals in the multimodal grammar are
atomic symbols. The multimodal aspects of the grammar
become apparent in the terminals. Each terminal contains
three components W :G:M corresponding to the n + 1
tapes, where W is for the spoken language stream, G is
the gesture stream, and M is the combined meaning. The
epsilon symbol (eps) is used to indicate when one of these
is empty in a given terminal. The symbols in W are words
from the speech stream. The symbols in G are of two
types. Sequences of symbols such as G area location indicate the presence of a particular kind of gesture in the
gesture stream, while those like SEM are used as references to entities referred to by the gesture. In our previous application, the semantic representation consisted of
predicates. In the current application we are experimenting with the use of XML as the meaning representation.
The meaning tape contains symbols which when concatenated together form coherent XML expressions.
Our approach makes certain simplifying assumptions
with respect to temporal constraints. In multi-gesture
utterances the primary function of temporal constraints
is to force an order on the gestures. If you say move
this here and make two gestures, the first gesture corresponds to this and the second gesture to here. Our
multimodal grammars encode order but do not impose explicit temporal constraints. However, general temporal
constraints between speech and the first gesture can be
�S
COMMAND
COMMAND
NP
DEICTICNP
DEICTICNP
SELECTION
CUISMOD
CUISINE
CUISINE
LOCMOD
LOCMOD
LOCATION
LOCATION
DDETSG
DDETPL
NUM
NUM
RESTSG
RESTPL
Entry
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
COMMAND
show:eps: show NP eps:eps: /show
tell:eps: info me:eps:eps about:eps:eps
DEICTICNP eps:eps: /info
eps:eps: restaurant CUISMOD
restaurants:eps:eps LOCMOD
eps:eps: /restaurant
DDETSG SELECTION
eps:1:eps RESTSG eps:eps: restaurant
Entry eps:eps: /restaurant
DDETPL SELECTION
NUM RESTPL eps:eps: restaurant
Entry eps:eps: /restaurant
eps:area:eps eps:selection:eps
eps:eps: cuisine
CUISINE eps:eps: /cuisine
italian:eps:italian
chinese:eps:chinese
eps:eps: location
LOCATION eps:eps: /location
eps:eps:eps
in:eps:eps this:G:eps
area:area:eps eps:location:eps Entry
along:eps:eps this:G:eps
route:line:eps eps:location:eps Entry
this:G:eps
these:G:eps
two:2:eps
three:3:eps
restaurant:restaurant:eps
restaurants:restaurant:eps
eps:SEM:SEM
<
>
<
< >
<
<
>
<
>
>
>
<
>
<
<
<
<
>
<
<
>
>
>
>
>
<
>
Figure 1: Multimodal grammar fragment
enforced before the FSA is applied.
A multimodal CFG (MCFG) can be defined formally
as quadruple < N; T; P; S >. N is the set of nonterminals. P is the set of productions of the form A !
where A 2 N and
2 (N [ T )�. S is the
start symbol for the grammar. T is the set of terminals of the form (W [ fepsg) : (G [ fepsg) : M �
where W is the vocabulary of speech, G is the vocabulary of gesture=GestureSymbols [ EventSymbols;
GestureSymbols =fG, area, location, restaurant, 1, : : :g
and an event symbol EventSymbol =fSEMg. M is the
vocabulary to represent meaning and includes the event
symbol (EventSymbols � M ).
In general a context-free grammar can be approximated
by an FSA (Pereira and Wright, 1997; Nederhof, 1997).
The transition symbols of the approximated FSA are the
terminals of the context-free grammar and in the case of
multimodal CFG as defined above, these terminals contain three components, W , G and M . The multimodal
CFG fragment in Figure 1 translates into the FSA in Figure 2, a three-tape finite state device capable of composing
two input streams into a single output semantic representation stream.
While a three-tape finite-state automaton is feasible in
principle (Rosenberg, 1964), currently available tools for
finite-state language processing (Mohri et al., 1998; van
Noord, 1997) only support finite-state transducers (FSTs)
(two tapes). Furthermore, speech recognizers typically do
not support the use of a three-tape FSA as a language
model. In order to implement our approach, we convert
the three-tape FSA (Figure 2) into an FST, by decomposing the transition symbols into an input component
(G � W ) and output component M , thus resulting in a
function, T :(G � W ) ! M . This corresponds to a transducer in which gesture symbols and words are on the input tape and the meaning is on the output tape. The domain of this function T can be further curried to result
in a transducer that maps R:G ! W . This transducer
captures the constraints that gesture places on the speech
stream and we use it as a language model for constraining the speech recognizer based on the recognized gesture
string. In the following sections we discuss several advancements in our finite-state approach to understanding
multimodal input.
3 Gesture symbol complexes
In our original approach, atomic symbols were used in the
multimodal grammar and corresponding machine to represent different types of gestures. For example, Gp was
used for gestural reference to a person, Go for a reference
to an organization, 2Gp for a gestural reference to a set
of two people and so on. In our current application we
are exploring the idea of decomposing the gesture symbols into sequences of symbols each of which conveys a
specific attribute of the content such as type or number.
This facilitates reference to sets of specific symbols. It
also limits the number of symbols that are needed for gesture. It plays an important role in enabling the storage of
specific gesture contents (See Section 4) and aggregation
(See Section 5). The gesture symbol complexes follow a
basic form: G FORM MEANING (NUMBER TYPE) SEM.
FORM indicates the physical form of the gesture: and
has values such as area, point, line, arrow. MEANING
indicates the specific meaning of that form for example
an area can be either a location or a selection. NUMBER and TYPE are only found with selection. They indicate the number of entities selected (1,2,3, many) and
the specific type of entity (restaurant, theatre). The TYPE
mixed is used for gestures at collections of entities of varied different types. In order to facilitate abstraction and
recomposition of specific gestural content (see Section 4),
the specific content is mapped to a distinguished symbol
SEM, while the other attributes of the gesture are mapped
to themselves.
As an example, if the user draws an area on the screen
which contains two restaurants, which have identifiers id1
and id2, the resulting gesture lattice will be as in Figure 3.
If the speech is show me chinese restaurants
in this neighborhood then the first path will be
chosen when the multimodal finite-state device is applied. If the speech is tell me about these two
restaurants then the second, selection, path will be
chosen.
If instead the user circles a restaurant and a theatre
the lattice would be as in Figure 4 and if they say
tell me about this theatre the third path will
be taken. But if they say tell me about these
two the fourth path will be taken. This approach allows
�for cases where a user circles several entities and selects
a specific one by type.
If we did not split the symbols we would need a
G area location symbol, G area selection 1 restaurant,
G area selection 2 restaurant etc., significantly increasing the alphabet of gesture symbols. The split symbols
also allow more perspicuous representation of more general categories. For example, if place in tell me
about this place can refer to either a restaurant or
a theatre then it can be assigned both arcs in the lattice. As
shown in the next two sections, the splitting of gestures
symbols also plays an important role in the abstraction
and recovery of specific gestural content, and the process
of aggregation.
4 Recovering gesture content by
composition
In order to capture multimodal integration using finitestate methods, it is necessary to abstract over certain aspects of the gestural content. For example, it is not possible to capture all of different possible sequences of coordinates that occur in gesture so that they can be copied
from the gesture input tape to the meaning output tape.
In our previous approach we assigned the specific content
of gestures to a series of numbered variables e1, e2, e3
. . There are a number of limitations to this approach.
The number of gestural inputs that can be handled is limited by the number of variables used. If a large number
are used then the resulting multimodal finite-state device
increases significantly in size since an arc is needed for
each variable in every place where gesture content can
be copied onto the meaning tape. This becomes a significant problem when aggregation of gestures is considered (See Section 5 below) since a new variable is needed
for each combination of gestures. We have developed a
new approach to this problem. The gestural input is represented as a transducer that maps S : I ! G where G
are gesture symbols and I are the specific interpretations
(see Figure 4). The G side contains indication of the type
of gesture and its properties. In any place where there
is specific content such as a list of entities or points in
the gesture stream the symbol in G is the reserved symbol SEM. The specific content is placed on the I side opposite SEM. All G symbols other than SEM match with
an identical symbol on I . In order to carry out the multimodal composition with the transducer R : G ! W
and T : (G � W ) ! M , the output projection G of
S : I ! G is taken. After composition we take a projection U : G ! M of the resulting G W:M machine, basically we factor out the speech W information. We then
compose S and U yielding I:M. In order to read off the
meaning we concatenate symbols from the M side. If the
M symbol is SEM we instead take the I symbol for that
arc. As an example, when the user says show chinese
restaurants in this area and the gesture is as
in Figure 3 the resulting G W:M machine is as in Figure 6.
In order to compose this with Figure 3 the W is removed.
Reading of the meaning from the resulting I:M we have
the representation in Figure 7.
5 Aggregation for Deictic Numerals
Johnston (2000) examines the problems posed for the
unification-based approach to multimodal parsing (Johnston, 1998) by deictic numeral expressions such as
these four restaurants. The problem is that
there are a multitude of different possible sequences of
gestures that are compatible and should be integrated
with this spoken phrase. The user might circle a set
of four restaurants, they might circle four individual
restaurants, they might circle two sets of two, circle one
and circle three etc. Capturing all of these possibilities in the spoken language grammar significantly increases its size and complexity and any plural expression is made massively ambiguous. The suggested alternative in (Johnston, 2000) is to have the deictic numeral subcategorize for a plurality of the appropriate
number and predictively apply a set of gesture combination rules in order combine elements of gestural input into the appropriate pluralities. In the finite-state approach this is achieved using a method we term aggregation which serves a pre-processing phase on the gesture
input lattice. Additional branches are added to the lattice which represent combinations of adjacent elements.
This process needs to combine the specific semantic contents (SEM values) and so is carried on outside of the
finite-state representation. An expression such as these
three restaurants is assigned the gesture stream
G 3 restaurant SEM by the multimodal grammar. 2 This
will directly combine with a single area gesture containing three restaurants. In order to combine with a sequence
of three separate gestures on single restaurants aggregation must apply. The gesture lattice for three gestures in a
row is G:G 1:1 restaurant:restaurant ([id1]):SEM G:G
1:1 restaurant:restaurant ([id2]):SEM G:G 1:1 restaurant:restaurant ([id3]):SEM. In pre-processing the gesture lattice is parsed and adjacent selections of identical
type are composed and new branches added to the lattice.
In this case, three more gestures are added to the lattice
as in Figure 5. This can be thought of as a closure on
the gesture lattice of a function which combines adjacent
gestures of identical type.
When this gesture lattice is combined with the spoken input by the multimodal finite state device the speech
will pick out the G 3 restaurant path in the gesture lattice. We term this kind of aggregation type specific. We
also use type non-specific aggregation to generate aggregates of mixed type. For example in the case where the
user says tell me about these two and circles a
restaurant and then a theatre, non-type specific aggregation applies to combine the two gestures into an aggregate
of mixed type G:G 2:2 mixed:mixed ([id4,id5]):SEM and
this is able to combine with these two. In order to preserve an indication of the original sequence of gestures the
newly added paths can be assigned lower weights.
2 We are simplifying the gesture symbol complex here for ease of
exposition. In each case, the area selection would come between the G
and the number.
�6 Finite-state Semantic Representation
A significant aspect of our approach is that in addition to capturing the structure of the input we also build
the semantic representation within the finite-state framework. In our original application (Johnston and Bangalore
2000), we generated a prolog-like logical representation,
for example: email([person(id1),organization(id2)]).
In our city information application we are exploring the use of an XML-based meaning representation. The symbols on the meaning tape can be concatenated together to form coherent XML expressions
which are then evaluated by the underlying application. For example, show chinese restaurants
in this neighborhood yields Figure 7.
7 Conclusion
We have presented an approach to multimodal language
understanding in which speech and gesture inputs are assigned a combined meaning by a finite-state device. This
work is novel not just in its application to multimodal input but also in that it assigns semantic representation using a finite-state device. We have highlighted a number
of recent advancements in the approach since Johnston
and Bangalore 2000. Gesture symbols have been split up
into gesture symbol complexes which allow for a broader
range of expression. The specifics of gestural input are abstracted over into a gesture lattice and reinserted into the
selected multimodal interpretation without the use of variables or buffers. We have addressed the problem of deictic
numerals brought up by Johnston 2000 using an aggregation mechanism which acts as a pre-processing stage on
the gesture input and have explored the use of XML as an
output meaning representation. In ongoing work we are
exploring methods for automatically generating the multimodal grammar from a feature-based representation, and
examining how the machine can be used in reverse for
multimodal generation tasks.
References
Steven Abney. 1991. Parsing by chunks. In Robert Berwick,
Steven Abney, and Carol Tenny, editors, Principle-based
parsing. Kluwer Academic Publishers.
Srinivas Bangalore and Giuseppe Riccardi. 2000. Stochastic finite-state models for spoken language machine translation. In Proceedings of the Workshop on Embedded Machine
Translation Systems.
Srinivas Bangalore. 1997. Complexity of Lexical Descriptions
and its Relevance to Partial Parsing. Ph.D. thesis, University
of Pennsylvania, Philadelphia, PA, August.
Michael Johnston and Srinivas Bangalore. 2000. Finite-state
multimodal parsing and understanding. In Proceedings of
COLING 2000, Saarbruecken, Germany.
Michael Johnston. 1998. Unification-based multimodal parsing. In Proceedings of COLING-ACL, pages 624–630, Montreal, Canada.
Michael Johnston. 2000. Deixis and conjunction in multimodal
systems. In Proceedings of COLING 2000, Saarbruecken,
Germany.
Aravind Joshi and Philip Hopely. 1997. A parser from antiquity.
Natural Language Engineering, 2(4).
Ronald M. Kaplan and M. Kay. 1994. Regular models
of phonological rule systems. Computational Linguistics,
20(3):331–378.
Lauri Kartunnen. 1991. Finite-state constraints. In Proceedings
of the International Conference on Current Issues in Computational Linguistics, Universiti Sains Malaysia, Penang,
Malaysia.
Kimmo K. Koskenniemi. 1984. Two-level morphology: a general computation model for word-form recognition and production. Ph.D. thesis, University of Helsinki.
Mehryar Mohri, Fernando C. N. Pereira, and Michael Riley.
1998. A rational design for a weighted finite-state transducer
library. Number 1436 in Lecture notes in computer science.
Springer, Berlin ; New York.
Mark-Jan Nederhof. 1997. Regular approximations of cfls: A
grammatical view. In Proceedings of the International Workshop on Parsing Technology, Boston.
Fernando C.N. Pereira and Michael D. Riley. 1997. Speech
recognition by composition of weighted finite automata. In
E. Roche and Schabes Y., editors, Finite State Devices for
Natural Language Processing, pages 431–456. MIT Press,
Cambridge, Massachusetts.
Fernando C.N. Pereira and R. Wright. 1997. Finite-state approximation of phrase structure grammars. In E. Roche and
Schabes Y., editors, Finite State Devices for Natural Language Processing. MIT Press, Cambridge, Massachusetts.
Giuseppe Riccardi, R. Pieraccini, and E. Bocchieri. 1996.
Stochastic Automata for Language Modeling. Computer
Speech and Language, 10(4):265–293.
Emmanuel Roche. 1999. Finite state transducers: parsing free
and frozen sentences. In András Kornai, editor, Extended Finite State Models of Language. Cambridge University Press.
A.L. Rosenberg. 1964. On n-tape finite state acceptors. FOCS,
pages 76–81.
Gertjan van Noord. 1997. FSA Utilities: A Toolbox to Manipulate Finite-state Automata. In Derick Wood Darrell Raymond and Sheng Yu, editors, Automata Implementation. Lecture Notes in Computer Science 1260. Springer Verlag.
�0
eps_show:<show>
1
eps_tell:<info>
2
eps:<restaurant>
eps_me:eps
3
4
eps:<cuisine>
eps_about:eps
5
eps_chinese:chinese
6
eps_italian:italian
G_these:eps
7
G_this:eps
8
9
eps:</cuisine>
area_eps:eps
10
11
eps_restaurants:eps
selection_eps:eps
13
14
eps:<location>
2_two:eps
17
eps_in:eps
21
22
G_this:eps
selection_eps:eps
15
1_eps:eps
19
restaurant_restaurants:eps
restaurant_restaurant:eps
23
G_this:eps
24
12
3_three:eps
18
eps_along:eps
area_eps:eps
eps:<restaurant>
25
line_route:eps
eps:</restaurant>
area_area:eps
26
27
SEM_eps:SEM
location_eps:eps
28
29
eps:</restaurant>
SEM_eps:SEM
30
31
eps:</location>
32
eps:</info>
eps:</restaurant>
16
eps:</show>
20
Figure 2: Multimodal three-tape FSA
�location:location
G:G
0
area:area
1
2
3
(..points..):SEM
2:2
restaurant:restaurant
7
([id1,id2]):SEM
selection:selection
4
5
6
Figure 3: Gesture Lattice: Two restaurants
0
area:area
1
2
(..points..):SEM
3
location:location
G:G
selection:selection
restaurant:restaurant
1:1
2:2
4
([id1]):SEM
6
7
mixed:mixed
8
10
([id2]):SEM
theatre:theatre
5
([id1,id2]):SEM
9
Figure 4: Gesture Lattice: Restaurant and theatre
restaurant:restaurant
13
2:2
([id1,id2]):SEM
14
12
G:G
0
G:G
5
G:G
1:1
1
2
restaurant:restaurant
([id1]):SEM
3
4
G:G
3:3
19
restaurant:restaurant
6
restaurant:restaurant
2:2
15
G:G
18
1:1
([id2]):SEM
7
restaurant:restaurant
16
8
G:G
1:1
9
10
restaurant:restaurant
11
([id3]):SEM
([id2,id3]):SEM
17
21
([id1,id2,id3]):SEM
20
Figure 5: Aggregated Lattice
0
eps_show:<show>
1
eps_eps:<restaurant>
2
eps_eps:<cuisine>
3
eps_chinese:chinese
4
eps_eps:</cuisine>
5
eps_restaurants:eps
6
eps_eps:<location>
7
eps_in:eps
8
G_this:eps
9
Figure 6: G W:M machine
<show> <restaurant>
<cuisine>chinese</cuisine>
<location>(...points...)</location>
</restaurant> </show>
Figure 7: Sample XML output
area_area:eps
10
location_eps:eps
11
SEM_eps:SEM
12
eps_eps:</location>
13
eps_eps:</restaurant>
14
eps_eps:</show>
15
�
 Nerd Smile
Nerd Smile