IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
319
The Pervasive Workflow: A Decentralized Workflow
System Supporting Long-Running Transactions
Frederic Montagut, Student Member, IEEE, Refik Molva, Member, IEEE, and Silvan Tecumseh Golega
Abstract—Workflow technologies are becoming pervasive in that
they enable the execution of business processes in distributed
and ubiquitous computing environments. As long-running transactions, the execution of workflows in environments without dedicated infrastructures raises transactional requirements due to the
dynamicity of resources available to run a workflow instance and
the integration of relaxed atomicity constraints at both design and
instantiation time. In this paper, we propose an adaptive transactional protocol for the pervasive workflow model developed in a
previous work to support the execution of business processes in
the pervasive setting. The execution of this protocol takes place
in two phases. First, candidate business partners are assigned to
tasks using an algorithm wherein the selection process is based
on both functional and transactional requirements. The workflow
execution further proceeds through a hierarchical coordination
protocol managed by the workflow initiator and controlled based
on a decision table computed as an outcome of the business partner assignment procedure. The resulting workflow execution is
compliant with the defined consistency requirements, and the coordination decisions depend on the transactional characteristics
offered by the partners assigned to each task. An implementation
of our theoretical results relying on ontology Web Language for
Series and Business Process Execution Language technologies is
further detailed as a proof of concept.
Index Terms—Decentralized workflows, transaction-aware composition, transactional consistency.
I. INTRODUCTION
ORKFLOW technologies are becoming pervasive in
that they enable the execution of long-running business
processes and transactions in distributed and ubiquitous environments [1]–[3]. The adequate execution support for pervasive
workflows has to cope with the lack of dedicated infrastructure
for management and control tasks in order to provide business
users with means to leverage the resources available in their
surrounding environment. To that effect, a first step has been
achieved by the design of a fully decentralized workflow architecture based on the service oriented computing paradigm
(SOC) [4]. Featuring a dynamic assignment of tasks to workflow partners, this architecture allows users to initiate work-
W
Manuscript received November 27, 2006; revised February 25, 2007, June 8,
2007, and December 18, 2007. This work was supported in part by European
Union (EU) Information on Science and Technology (IST) Directorate General
as a part of FP6 IST projects MOSQUITO, in part by the R4eGov, and in part by
the Systems, Applications and Products (SAP) Research Laboratories, France
S.A.S. This paper was recommended by Guest Editor H. Patrick.
F. Montagut is with the Systems, Applications and Products
(SAP) Research Laboratories, France, 06250 Mougins, France (e-mail:
frederic.montagut@sap.com).
R. Molva is with the Institut Eurecom, 06904 Sophia-Antipolis, France
(e-mail: refik.molva@eurecom.fr).
S. T. Golega is with the Hasso-Plattner-Institut, 900460-14440 Potsdam,
Germany (e-mail: silvangolega@gmail.com).
Digital Object Identifier 10.1109/TSMCC.2008.919184
flows in any environment where surrounding users’ resources
can be advertised by various means including a service discovery mechanism. Yet, this architecture does not provide any
guarantee on the consistency of the outcome reached by the
process execution. Considering the lack of reliability akin to
distributed environments, data and transaction consistency is a
main issue. Transactional requirements raised by the execution
of processes on top of the pervasive workflow infrastructure are
twofold: on the one hand, the workflow execution is dynamic
in that the workflow partners offering different characteristics
can be assigned to tasks depending on the resources available
at run-time, and on the other hand, atomicity of the workflow
execution can be relaxed as intermediate results produced by
the workflow may be kept despite the failure of one partner.
Existing transactional protocols [5], [6] are not adapted to solve
this paradigm as they do not offer enough flexibility to cope, for
instance, with the run-time assignment of computational tasks.
In this paper, we propose an adaptive transactional protocol for the pervasive workflow management system developed
in [4]. The execution of this protocol takes place in two phases.
First, business partners are assigned to tasks using an algorithm
wherein the selection process is based on functional and transactional requirements. These transactional requirements are defined at the workflow design stage using the acceptable termination states (ATS) model. The workflow execution further
proceeds through a hierarchical coordination protocol managed
by the workflow initiator and controlled using a decision table
computed as an outcome of the business partner assignment
procedure. The resulting workflow execution is compliant with
the defined consistency requirements and the coordination decisions depend on the characteristics of the partners assigned to
each task. Besides, it should be noted that the practical solutions
that are presented in this paper do not only answer specific requirements introduced by the pervasive workflow model but are
sufficiently generic to be applied to other workflow architectures
supporting long-running transactions.
The remainder of the paper is organized as follows. Section II
introduces preliminary definitions and the methodology underpinning our approach. We present an example of pervasive
workflow execution in section III for the purpose of illustrating our results throughout the paper. Section IV introduces a
detailed description of the transactional model used to represent the characteristics offered by business partners. Section V
describes how transactional requirements expressed by means
of the ATS model are derived from the inherent properties of
termination states. Sections VI and Sections VII present the
transaction-aware partner assignment procedure and the associated coordination protocol, respectively. An implementation
1094-6977/$25.00 © 2008 IEEE
�320
Fig. 1.
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
Pervasive workflow run-time specification.
of our theoretical results based on Web services technologies
including ontology Web Language for Series (OWL-S) [7]
and Business Process Execution Language (BPEL) [8] is presented in Section VIII. Section IX discusses related work while
Section X presents concluding remarks.
II. DEFINITIONS AND GOALS STATEMENT
Defining a transactional protocol for pervasive workflows
raises challenges that are mainly due to the flexibility of their
execution and their lack of dedicated infrastructure in charge of
management and control tasks. After a short overview of the features offered by the pervasive workflow architecture, we specify
the set of requirements in terms of transactional consistency that
must be met by the execution of pervasive workflows.
A. Pervasive Workflows
In this section, we present the pervasive workflow model that
was designed in [4]. The pervasive workflow concept introduces a workflow management system supporting the execution
of business processes in environments whereby computational
resources offered by each business partner can potentially be
used by any party within the surroundings of that business partner. This workflow management system features a distributed
architecture characterized by two objectives.
1) Fully decentralized architecture: The management of the
workflow execution is distributed among the partners taking part in a workflow instance in order to cope with the
lack of dedicated infrastructure in the pervasive setting.
2) Dynamic assignment of business partners to workflow
tasks: The peers in charge of executing the workflow can
be discovered at run-time based on available resources.
The run-time specification of the pervasive workflow architecture is depicted in Fig. 1. Having designed an abstract representation of the workflow whereby business partners are not yet
assigned to functional tasks, the workflow initiator d1 launches
the execution. The initiator d1 executes a first set of tasks t1
1) before discovering in its surrounding environment a partner
able to perform the next tasks t2 2). Once the discovery phase
is complete; 3) workflow data are transferred from the peer that
performed the discovery to the discovered one and 4) the workflow execution further proceeds with the processing of the next
set of tasks t3 . The sequence composed of the discovery request,
the transfer of workflow data, and the execution of a set of tasks
is iterated till the final vertex. In order to relax the availability
constraints of pervasive environments, the execution is stateless
so that, after the completion of a set of tasks, each business part-
ner sends all workflow data to the next partner involved in the
workflow execution, and thus, does not have to remain online
till the end of a workflow instance. Along with workflow application data, the flow of data among business partners includes
the abstract representation of the workflow that consists of the
execution plan and the functional requirements associated with
each workflow step. We note that W is the abstract representation of a pervasive workflow and W = (ta )a∈[1,q ] where ta
denotes a vertex that is a set of workflow tasks that are performed by a business partner from the receipt of workflow data
till the transfer of these data to the next partner. The instance of
W wherein q business partners (da )a∈[1,q ] have been assigned
to the sets (ta )a∈[1,q ] is denoted by Wd = (da )a∈[1,q ] .
B. Assuring Consistency of Pervasive Workflows
As a first step towards assuring workflow consistency, one has
to be able to express transactional requirements as part of the
workflow model. We therefore want to offer the possibility to
coordinate some tasks of a pervasive workflow instance in order
to assure the consistency of termination states. Our approach
consists in partitioning the specification of a pervasive workflow
into subsets or zones and identifying some zones called critical
zones, wherein transactional requirements defined by designers
have to be fulfilled.
Definition 2.1. We define a critical zone C of a workflow W
as a subset of W composed of contiguous vertices that require
to meet some transactional requirements. We distinguish within
C:
1) (mk )k ∈[1,i] , the i vertices whose tasks only modify mobile
or volatile data;
2) (vk )k ∈[1,j ] , the j vertices whose tasks modify data other
than mobile ones, v1 being the first vertex of C.
The business partner assigned to the vertex vk (respectively,
mk ) is denoted by dvk (respectively, dm
k ), and the instance of C
is denoted by Cd .
We adopt a simple transactional protocol in which the coordination is managed in a centralized manner by dv1 assigned to v1 .
The role of the coordinator consists in making decisions based
on the transactional requirements defined for the critical zone
given the overall state of workflow execution so that the critical
zone execution can reach a consistent state of termination. The
coordination is assured in a hierarchical way and the business
partners (dvk )k ∈[1,j ] that are subcoordinators report directly to dv1
v
whereas the partners dm
k report to the business partner dx most
1
recently executed. For the sake of simplicity, we consider that
m
m
the set of business partners {dm
l , dl+ 1 , . . . , dp } reporting to the
v
business partner dx form an abstract partner named dm
l,p that is
assigned to the abstract vertex ml,p . C therefore denotes a set of
n vertices (abstract or not) C = (ca )a∈[1,n ] . This reporting strategy based on the type of business partners is depicted in Fig. 2.
Within the pervasive workflow model, the workflow execution is performed by business partners that are assigned to vertices at run-time. Considering the diversity of business partners
1 Business partner of type d v that is located on the same branch of the workk
flow as these dm
k business partners and that has most recently completed its
execution.
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
321
business partners can be assigned to workflow vertices. Finally,
once Cd is formed, we can proceed toward the second goal by
expressing the coordination rules inherent to Cd and designing
the actual coordination protocol in charge of processing those
rules. This methodology basically follows the steps of the transactional pervasive workflow lifecyle from the instantiation to
the execution, as depicted in Fig. 3.
III. MOTIVATING EXAMPLE
Fig. 2.
Protocol actors.
encountered in the pervasive setting, we assume that these partners might offer various transactional properties, in addition to
different functional capabilities. For instance, a business partner can have the capability to compensate the effects of a given
operation or to re-execute the operation after failure as possible
transactional properties whereas some other business partner
does not have any of these capabilities. It thus becomes necessary to select the business partners executing a critical zone of a
pervasive workflow not only based on functional requirements
but also according to transactional ones. The business partner
assignment procedure through which business partners are assigned to vertices using a match-making procedure based on
functional requirements has to be augmented to integrate transactional ones. The purpose of the business partner assignment
procedure consists in building an instance of C consistent with
the transactional requirements imposed by designers. It is thus
required to first discover all the business partners that will be
involved in the execution of a given critical zone prior to the
execution in order to verify the existence of a set of business
partners that can be assigned to C. Once the instance of C
has been created, the execution supported by the coordination
protocol can start. The execution of the coordination protocol
therefore consists of two phases: the first phase that includes the
discovery and assignment of business partners to vertices and
the second one with the actual execution.
C. Methodology
As described in Section II-B, a coordination protocol designed to support the execution of pervasive workflows has to
meet two basic requirements. First, business partners have to be
assigned based on a transaction-aware process. Second, a runtime mechanism should process and assure the coordination of
the execution in the face of failure scenarios. In order to achieve
the first, we capitalize on the work presented in [9] whose results
are reminded later on in this paper. In our approach, the partners
part of a critical zone instance Cd are selected according to their
transactional properties by means of a matchmaking procedure.
We therefore need to first specify the semantic associated with
the transactional properties offered by business partners. The
matchmaking procedure is indeed based on this semantic. This
semantic is also used in order to define a tool allowing workflow designers to specify their transactional requirements for a
given critical zone. Based on these transactional requirements,
In this section, we describe a motivating example that will
be used throughout the paper to illustrate the design methodology. We consider a workflow executed during a computer fair
where clients, retailers, and hardware providers can electronically exchange orders and invoices. The workflow used in this
example is depicted in Fig. 4. Alice would like to buy a new
computer and makes a call for offer to three available retailers.
After having received some offers, she decides to go for the
cheapest one, and therefore, contacts the corresponding retailer
Bob. Bob initiates the critical zone C1 by sending an invoice
to Alice and contacting his hardware provider Jack (vertex v1 ).
Alice pays using Bob’s trusted payment platform (vertex v2 ).
In the meantime, Jack receives the order from Bob and sends
him an invoice (vertex m1 ) that he pays (vertex v3 ) using Jack’s
trusted payment platform. Afterwards, Bob starts to build the
computer and ships it to Alice (vertex v4 ).
Of course, in this example, we need to define transactional
requirements as, for instance, Bob would like to have the opportunity to cancel his payment to Jack if Alice’s payment is not
done. Likewise, Alice would like to be refunded if Bob does not
manage to assemble and ship the computer. These different scenarios refer to characteristics offered by the business partners or
services assigned to the workflow tasks. For example, the payment platform should be able to compensate Alice’s payment
and Jack’s payment platform should offer the possibility to cancel an order. Yet, it is no longer necessary for Jack to provide
the cancellation option if the payment platform claims that it is
reliable and not prone to transaction errors. In this example, we
do not focus on the trust relationship between the different entities, and therefore, assume the trustworthiness of each of them,
yet we are rather interested in the transactional characteristics
offered by each participant.
IV. TRANSACTIONAL MODEL
In this section, we provide and extend the semantic specifying the transactional properties offered by business partners
described in [9] before specifying the consistency evaluation
tool associated with this semantic. The semantic model is based
on the “transactional Web service description” defined in [10].
A. Transactional Properties of Business Partners
A model specifying semantically the transactional properties
of Web services is presented in [10]. This model is based on
the classification of computational tasks made in [11] and [12]
that considers three different types of transactional properties.
�322
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
Fig. 3.
Methodology.
Fig. 4.
Workflow example. Deal at a fair.
Fig. 6.
Fig. 5.
Termination states of C 1 .
A task, and by extension, a business partner executing this task
can be defined as follows.
1) Compensatable: The data modified by the task can be
rolled back.
2) Retriable: The task is sure to complete successfully after
a finite number of tries.
3) Pivot: The task is neither compensatable nor retriable.
In the definition of a critical zone, we distinguish two sets
of business partners: (dm
k )k ∈[1,i] that only modify mobile or
volatile data and (dvk )k ∈[1,j ] that only modify data other than
State model.
mobile ones, e.g., remote database, production of an item,
etc. Based on this distinction, the aforementioned transactional
model has to be extended. This model describes the modification of permanent data, and is thus, only relevant to database
systems whereas the pervasive setting introduces, in addition,
transactional properties representing business partners’ hardware characteristics such as battery level, reliability, connectivity, etc. A new transactional property representing the reliability
of a business partner is therefore introduced.
1) A business partner is reliable (respectively, unreliable) if
it is highly unlikely (respectively, likely) that the business
partner will fail due to hardware failures (battery level,
communication medium access, etc.)
To properly detail this model, we can map the transactional
properties with the state of data modified by the business partners during the execution of computational tasks. This mapping
is depicted in Fig. 6. Basically, data can be in three different
states: initial (0); unknown (x); and completed (1). In the state
(0), it means either that the vertex execution has not yet started
initial, the execution has been aborted before starting, or the
data modified have been compensated after completion. In
state (1), it means that the vertex has been properly completed.
In state (x), it means either that the execution is active, the
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
Fig. 7.
323
State diagrams of business partners dvk and dm
k .
execution has been stopped, canceled before completion, the execution has f ailed or an hardware failure, Hf ailed happened.
These transactional properties allow to define eight types of
business partners: (reliable, retriable) (rl ,rt ); (reliable, compensatable) (rl ,c); (reliable, retriable, and compensatable) (rl ,rt c);
(reliable, pivot) (rl ,p); and the four others Unreliable (url ). We
must distinguish within this model:
a) the inherent termination states: f ailed, completed, and
Hf ailed that result from the normal course of the task
execution;
b) the forced termination states: compensated, aborted, and
canceled that result from a coordination message received
during a coordination protocol instance and forcing a task
execution to either stop or rollback.
In the state diagrams of Figs. 6 and 7, plain and dashed lines
represent the inherent transitions leading to inherent states and
the forced transitions leading to forced states, respectively.
The transactional properties of the business partners are only
differentiated by the states f ailed, compensated and Hf ailed
that indeed, respectively, specify the retriability, compensatability, and reliability aspects.
Definition 4.1. We have for a given partner d:
1) f ailed is not a termination state of d ⇔ d is retriable;
2) compensated is a termination state of d ⇔ d is compensatable;
3) Hf ailed is not a termination state of d ⇔ d is reliable.
From the state transition diagram, we can also derive some
simple rules. The states f ailed, completed, Hf ailed, and
canceled can only be reached if the business partner is in the
state active. The state compensated can only be reached if the
partner is in the state completed. The state aborted can only be
reached if the partner is in the state initial.
Regarding the distinction made on the nature of vertices
within a critical zone, we specify some requirements for the
business partners selected for a critical zone execution.
On the one hand, as the partners (dvk )k ∈[1,j ] modify sensitive
and permanent data, we consider that they are required to be
reliable. There are therefore four types of dvk partners: (rl ,rt ),
(rl ,c), (rl ,rt c), and (rl ,p).
On the other hand, as the business partners of type dm
k only
modify mobile and volatile data, we first consider that they are
retriable besides compensatability is not required for volatile
data. Second, we assume that these tasks can be executed by
unreliable partners, and there are, as a result, only two types
m
of dm
k partners: (rl ,rt ) and (url ,rt ). If one of the dk partners
m
m
part of the abstraction dl,p is unreliable, then dl,p is unreliable,
otherwise dm
l,p is reliable. Fig. 7 depicts the transition diagram for
the six types of transactional partners that can be encountered.
B. Termination States
The crucial point of the transactional model specifying the
transactional properties of business partners is the analysis of
their possible termination states. The ultimate goal is indeed to
be able to define consistent termination states for a critical zone,
i.e., determining for each partner executing a critical zone vertex
which termination states it is allowed to reach.
Definition 4.2. We define the operator termination state ts(x)
that specifies the possible termination states of the element x.
This element x can be defined as follows.
1) A partner d and ts(d) ∈ {aborted, canceled, f ailed,
Hf ailed, completed, compensated}.
2) A vertex c and ts(c) ∈ {aborted, canceled, f ailed,
Hf ailed, completed, compensated}.
3) A critical zone composed of n vertices C = (ca )a∈[1,n ]
and ts(C) = (ts(c1 ), ts(c2 ), . . . , ts(cn )).
4) An instance Cd of C composed of n partners Cd =
(da )a∈[1,n ] and ts(Cd ) = (ts(d1 ), ts(d2 ), . . . , ts(dn )).
The operator TS(x) represents the finite set of all possible
termination states of the element x, TS(x) = (tsk (x))k ∈[1,j ] .
We especially have T S(Cd ) ⊆ TS(C) since the set T S(Cd )
represents the actual termination states that can be reached by Cd
according to the transactional properties of the partners assigned
to C. We also define for x a critical zone or a critical zone
instance and a ∈ [1, n].
1) ts(x, ca ): the value of ts(ca ) in ts(x)
2) tscomp(x): the termination state of x such that ∀ a ∈
[1, n] ts(x, ca ) = completed.
For the remaining of the paper, C = (ca )a∈[1,n ] denotes a critical zone of n vertices and Cd = (da )a∈[1,n ] an instance of C.
C. Transactional Consistency Tool
We use the ATS [13] model as the consistency evaluation tool
for the critical zone. ATS defines the termination states as when
a critical zone is allowed to reach so that its execution is deemed
consistent.
�324
Fig. 8.
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
ATS(C 1 ) and available business partners.
Definition 4.3. An ATS(C) is a subset of TS(C) whose elements are considered consistent by workflow designers for
a specific execution of C. A consistent termination state of
C is called an acceptable termination state ATSk (C); thus,
ATS(C) = (atsk (C))k ∈[1,i] . A set ATS(C) specifies the transactional requirements defined by designers associated with a
specific execution of C.
ATS(C) and TS(C) can be represented by a table that defines, for each termination state, the tuple of termination states
reached by each vertex, as depicted in Figs. 5 and 8. Depending on the application, different ATS tables can, of course, be
specified by designers for the same critical zone C, and for the
sake of readability, we do not introduce in this paper an index
[as in ATSi (C)] in the notation ATS(C). As mentioned in the
definition, the specification of ATS(C) is done at the workflow
designing phase. ATS(C) is mainly used as a decision table for a
coordination protocol so that Cd can reach an acceptable termination state knowing the termination state of at least one vertex.
The coordination decision, i.e., the termination state that has to
be reached, made given a state of the critical zone execution has
to be unique, this is the main characteristic of a coordination
protocol. In order to cope with this requirement, ATS(C) that
is used as input for the coordination decision-making process
has thus to verify some properties that are specified in the next
section.
V. FORMING ATS(C)
In this section, the definitions and theorems introduced and
proved in [9] are reminded and adapted to specify ATS(C) in the
scope of the pervasive workflow model. The approach followed
is based on the fact that ATS(C) ⊆ TS(C); thus, ATS(C) inherits the characteristics of TS(C). For the sake of clarity in what
follows, we make the assumption that only one business partner
can fail at a time during a pervasive workflow instance. Our
approach can indeed be extended easily to concurrent failure
scenarios as discussed later on in Section VI-D.
As explained earlier, the unicity of the coordination decision during the execution of a coordination protocol is a ma-
jor requirement. We thus try here to identify the elements
of TS(C) that correspond to different coordination decisions
given the same state of a workflow execution. There are two
situations whereby a protocol coordination has different possibilities of coordination given the state of a workflow vertex. Let a, b ∈ [1, n] and assume that the vertex cb has
failed.
1) The vertex ca is in the state completed, and either it
remains in this state or it is compensated.
2) The vertex ca is in the state active, and either it is canceled
or the coordinator let it reach the state completed.
From these two statements, we define the incompatibility from
a coordination perspective and the flexibility notions.
Defination 5.1. Two termination states of C tsk (C)
and tsl (C) are said to be incompatible from a coordination perspective iff ∃ a,b ∈ [1, n] such that tsk (C, ca ) =
completed, tsk (C, cb ) = tsl (C, cb ) ∈ {f ailed, Hf ailed}, and
tsl (C, ca ) = compensated. Otherwise, tsl (C) and tsk (C) are
said to be compatible from a coordination perspective.
The value in {compensated, completed} reached by a vertex ca in a termination state tsk (C) whereby tsk (C, cb ) ∈
{f ailed, Hf ailed} is called recovery strategy of ca against
cb in tsk (C).
Definition 5.2. A vertex ca is flexible against an other vertex
cb iff ∃ k ∈ [1, j] such that tsk (C, cb ) ∈ {f ailed, Hf ailed}
and tsk (C, ca ) = canceled. Such a termination state is said to
be flexible to ca against cb . The set of termination states of C
flexible to ca against cb is denoted by FTS(ca , cb ).
From these definitions, we now study the termination states
of C according to the compatibility and flexibility criteria in
order to identify the termination states that follow a common
strategy of coordination.
Definition 5.3. A termination state of C tsk (C) is called
generator of a vertex ca iff tsk (C, ca ) ∈ {f ailed, Hf ailed}
and ∀b ∈ [1, n] such that cb is executed before or in parallel
with ca , tsk (C, cb ) ∈ {completed, compensated}. The set of
termination states of C compatible with tsk (C) generator of ca
is denoted by CTS(tsk (C), ca ).
The set CTS(tsk (C), ca ) specifies all the termination states
of C that follow the same recovery strategy as tsk (C) against ca .
Definition 5.4. Let tsk (C) ∈ TS(C) be a generator of ca . Coordinating an instance Cd of C in case of the failure of ca consists
in choosing the recovery strategy of each vertex of C against
ca and the za < n vertices (va i )i∈[1,z a ] flexible to ca whose execution is not canceled when ca fails. As unreliable business
partners modify only volatile data, we consider that cancellation
is always performed if a task execution is still active as soon as a
failure occurs. The set (va i )i∈[1,z a ] is thus only composed of vertices of type vk . We call coordination strategy of Cd against ca
the set CS(Cd , tsk (C), (va i )i∈[1,z a ] , ca ) = CTS(tsk (C), ca ) −
∪zi=a 1 FTS(va i , ca ). If the partner da assigned to ca is retriable
then CS(Cd , tsk (C), (va i )i∈[1,z a ] , ca ) = ∅.
Cd is said to be coordinated according to CS(Cd ,
tsk (C), (va i )i∈[1,z a ] , ca ) if, in case of the failure of ca , Cd
reaches a termination state in CS(Cd , tsk (C), (va i )i∈[1,z a ] , ca ).
Of course, it assumes that the transactional properties of Cd are
sufficient to reach tsk (C).
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
Given a vertex ca , the idea is to classify the elements of
TS(C) using the sets of termination states compatible with the
generators of ca . Using this approach, we can identify the different recovery strategies and the coordination strategies associated with the failure of ca as we decide which vertices can
be canceled. Defining ATS(C) is therefore deciding at design
time the termination states of C that are consistent. ATS(C) is
to be inputted to a coordination protocol in order to provide it
with a set of rules that leads to a unique coordination decision
in any case. According to the definitions and properties we introduced earlier, we can now explicit some rules on ATS(C)
so that the unicity requirement of coordination decisions is
respected.
Definition 5.5. Let tsk (C) ∈ TS(C) such that tsk (C, ca ) ∈
{f ailed, Hf ailed} and tsk (C) ∈ ATS(C). ATS(C) is valid iff
∃ ! l ∈ [1, j] such that tsl (C) generator of ca compatible with
tsk (C) and CTS(tsl (C), ca ) − ∪zi=a 1 FTS(va i , ca ) ⊂ ATS(C)
for a set of vertices (va i )i∈[1,z a ] flexible to ca .
A valid ATS(C) therefore contains for all tsk (C) in which a
vertex fails a unique coordination strategy associated with this
failure and the termination states contained in this coordination
strategy are compatible with tsk (C). In Fig. 8, an example of
possible ATS is presented for the critical zone C1 . It just consists
in selecting the termination states of the table TS(C1 ) that we
consider consistent and respect the validity rule for the created
ATS(C1 ). For example, here the payment of Alice has to be
compensated if Bob fails to deliver the computer as specified in
ats2 = ts4 .
VI. ASSIGNING BUSINESS PARTNERS USING ATS
In this section, we specify the main steps of the partner assignment procedure whose underpinning theorems are proved
in [9]. The transaction-aware business partner assignment procedure aims at assigning n business partners to the n vertices
ca in order to create an instance of C acceptable with respect
to a valid ATS(C). We first define a validity criteria for the instance Cd of C with respect to ATS(C), the business partner
assignment algorithm is then detailed. Finally, we specify the
coordination strategy associated with the instance created from
our assignment scheme.
A. Acceptability of Cd With Respect To ATS(C)
Definition 6.1. Cd is an acceptable instance of C with respect
to ATS(C) iff TS(Cd ) ⊆ ATS(C).
Now we express the condition T S(Cd ) ⊆ ATS(C) in terms
of coordination strategies. The termination state generator of
ca present in ATS(C) is denoted as tsk a (C). The set of vertices whose execution is not canceled when ca fails is denoted
(va i )i∈[1,z a ] . We get Theorem 6-2 [9].
Theorem 6.2. TS(Cd ) ⊆ ATS(C) iff ∀ a ∈ [1, n]
CS(Cd , tsk a (C), (va i )i∈[1,z a ] , ca ) ⊂ ATS(C).
It should be noted that if f ailed (respectively, Hf ailed)
∈ ATS(C, ca ) where ATS(C, ca ) represents the acceptable termination states of the vertex ca in ATS(C) then
CS(Cd , tsk a (C), (va i )i∈[1,z a ] , ca ) = ∅.
325
B. Transaction-Aware Assignment Procedure
The business partner assignment algorithm uses ATS(C) as
a set of requirements during the partner assignment procedure,
and thus, identifies those partners whose transactional properties match the transactional requirements associated with vertices defined in ATS(C). The assignment procedure is an iterative process, partners are assigned to vertices sequentially.
At each step i, the assignment procedure therefore generates a partial instance of C noted Cdi . T S(Cdi ) refers to the
termination states of C that can be reached based on the
transactional properties of the i partners that are already assigned. Intuitively, the acceptable termination states refer to
the degree of flexibility offered when choosing the partners
with respect to the different coordination strategies complying
with ATS(C). This degree of flexibility is influenced by two
parameters.
1) The list of acceptable termination states for each workflow vertex. This list can be determined based on ATS(C).
Using this list, the requirements on the transactional properties of a candidate partner can be derived since this
partner can only reach the states defined in ATS(C) for the
considered vertex.
2) The assignment process is iterative, and therefore, as new
partners are assigned to vertices, both TS(Csi ) and the
transactional properties required for the assignment of further partners are updated. For instance, we are sure to no
longer reach the termination states CTS(tsk (C), ca ) allowing the failure of the vertex ca in ATS(C) when we
assign a partner retriable and reliable to ca . In this specific case, we no longer care about the states reached by
other vertices in CTS(tsk (C), ca ), and therefore, there
is no transactional requirements introduced for the vertices to which business partners have not already been
assigned.
We therefore need to first define the transactional requirements for the assignment of a partner after i steps in the assignment procedure.
1) Extraction of Transactional Requirements: From the two
requirements before, we define for a vertex ca :
1) ATS(C, ca ): set of acceptable termination states of ca that
is derived from ATS(C);
2) DIS(ca , Cdi ): set of transactional requirements that the
partner assigned to ca must meet based on previous assignments. This set is determined based on the following
reasoning.
a) (DIS1 )): the partner must be compensatable iff
compensated ∈ DIS(ca , Cdi ).
b) (DIS2 ): the partner must be retriable iff failed ∈
DIS(ca , Cdi ).
c) (DIS3 ): the partner must be reliable iff Hfailed ∈
DIS(ca , Cdi ).
Using these two sets, we� are able to compute
MinT P (da , ca , Cdi ) = ATS(C, ca ) DIS(ca , Cdi ) that defines
the minimal transactional properties a partner da has at
least to comply with in order to be assigned to the vertex ca at the i + 1 assignment step. We simply check
�326
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
the retriability and compensatability properties for the set
MinT P (da , ca , Cdi ).
1) f ailed ∈ MinT P (da , ca , Cdi ) ⇔ da has to verify the retriability property.
2) Hf ailed ∈ MinT P (da , ca , Cdi ) ⇔ da has to verify the
reliability property.
3) compensated ∈ MinT P (da , ca , Cdi ) ⇔ da has to verify
the compensatability property.
The set ATS(C, ca ) is easily derived from ATS(C). We now
need to compute DIS(ca , Cdi ). We assume that we are at the
i + 1 step of an assignment procedure, i.e., the current partial
instance of C is Cdi . Computing DIS(ca , Cdi ) means determining if (DIS1 ), (DIS2 ) and (DIS3 ) are true. From these three
statements, we can derive following four properties.
1) (DIS1 ) implies that state compensated can definitely be
reached by ca .
2) (DIS2 ) implies that ca cannot f ail.
3) (DIS2 ) implies that ca cannot be canceled.
4) (DIS3 ) implies that ca cannot Hf ail.
The third property is derived from the fact that, if a vertex cannot be canceled when the failure of a vertex has occurred, then it
has to finish its execution and reach at least the state completed.
In this case, if a business partner cannot be canceled, then it
cannot fail, which is the third property. To verify whether 1–4.
are true, we present the following theorems that are an extension
of results proved in [9].
Theorem 6.3. Let a ∈ [1, n]. The state compensated can
definitely be reached by ca iff ∃ b ∈ [1, n] − {a} verifying
(6 − 3b): db not retriable (respectively, reliable) is assigned to
cb and ∃ tsk (C) ∈ ATS(C) generator of cb such that tsk (C, ca ) =
compensated.
Theorem 6.4. Let a ∈ [1, n]. ca cannot fail (respectively,
Hf ail) iff ∃ b ∈ [1, n] − {a} verifying (6 − 4b): (db not compensatable is assigned to cb and ∃ tsk (C) ∈ ATS(C) generator of ca such that tsk (C, cb ) = compensated) or (cb is
flexible to ca and db not retriable is assigned to cb and ∀
tsk (C) ∈ ATS(C) such that tsk (C, ca ) = f ailed (respectively,
tsk (C, ca ) = Hf ailed), tsk (C, tb ) = canceled).
Theorem 6.5. Let a, b ∈ [1, n] such that ca is flexible to cb . ca
is not canceled when cb fails (respectively, Hf ail) iff 6 − 5b:
db not retriable (respectively, not reliable) is assigned to cb and ∀
tsk (C) ∈ ATS(C) such that tsk (C, cb ) = f ailed (respectively,
tsk (C, cb ) = Hf ailed), tsk (C, ca ) = canceled.
In order to compute DIS(ca , Cdi ), we have to compare ca
with each of the i vertices cb ∈ C − {ca } to which a business
partner db has already been assigned. Two cases have to be
considered: either we assign a business partner to a vertex vk or
to an abstract vertex ml,p . This is an iterative procedure. At the
initialization phase, in the first case, we have: since no vertex
has been yet compared to ca = vk , da can be of type (rl , p):
DIS(ca , Cdi ) = {f ailed}.
1) If cb verifies (6.3b) ⇒ compensated ∈ DIS(ca , Cdi ).
2) If cb verifies (6.4b) ⇒ f ailed ∈ DIS(ca , Cdi ).
3) If cb is flexible to ca and verifies (6-5b) ⇒ f ailed ∈
DIS(ca , Cdi ).
In this case, the verification stops if f ailed ∈ DIS(ca , Cdi ) and
compensated ∈ DIS(ca , Cdi ). For the vertices of type vk , we
indeed only need to check the retriability and compensatability
properties.
In the second case, we have the following at the initialization
phase: since no vertex has yet been compared to ca = ml,p , da
can be of type (url ): DIS(ca , Cdi ) = {Hf ailed}.
1) if cb verifies (6.4b) ⇒ Hf ailed ∈ DIS(ca , Cdi ).
In that case, the verification stops if Hf ailed ∈ DIS(ca , Cdi ).
For the vertices of type ml,p , we only need to check the reliability
property.
Finally, when MinT P (da , ca , Cdi ) is computed, we are able to
select the appropriate business partner to be assigned to a given
vertex according to transactional requirements.
2) Business Partner Assignment Process: Business partners
are assigned to each vertex based on an iterative process. Depending on the transactional requirements and the transactional
properties of the business partners available for each vertex,
different scenarios can occur.
a) Business partners of type (rl , rt c) are available in the case
of a vertex vk or business partners of type (rl ) are available
in the case of a vertex ml,p [i.e., all the business partners
of the abstraction are of type (rl ))]. It is not necessary to
compute any transactional requirements as such partners
match all transactional requirements.
b) A single partner is available for the considered vertex. We
need to compute the transactional requirements associated
with the vertex, and either the transactional properties offered by this partner are sufficient or there is no solution.
c) Business partners of type (rl , rt ) and (rl , c) but none of
type (rl , rt c) are available for a vertex vk . We need to
compute the transactional requirements associated with
the vertex, and we have three cases. First, (rl , rt c) is required and therefore there is no solution. Second, (rl , rt )
[respectively, (rl , c)] is required and we assign a business
partner of type (rl , rt ) [respectively, (rl , c)] to the vertex.
Third, there is no requirement.
The assignment procedure is performed by the coordinator c1 . Business partners have to be assigned to all vertices
prior to the beginning of the critical zone execution. The first
vertex is de facto assigned to the critical zone initiator. The
idea is then to first assign business partners to the vertices
verifying a) and b) since there is no flexibility in the choice
of the business partner. Vertices verifying c) are finally analyzed. Based on the transactional requirements raised by the
remaining vertices, we first assign partners to vertices with a
nonempty transactional requirements. We then handle the assignment for vertices with an empty transactional requirements.
Note that the transactional requirements of all the vertices to
which partners are not yet assigned are also affected (updated)
as a result of the current partner assignment. If no vertex has
transactional requirements, then we assign the partners of type
(rl , rt ) to assure the completion of the remaining vertices’
execution.
C. Actual Termination States of Cd
Once all the business partners have been assigned to vertices, we can coordinate their execution so that they respect
the defined transactional requirements. In order to do so, we
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
need to know the actual termination states subset of ATS(C)
that can be reached by the defined instance of C. Having computed TS(Cd ), we can deduce the coordination rules associated
with the execution of Cd . This subset is determined using the
following theorem that is proved in [9].
Theorem 6.6. Let Cd be an acceptable instance of C
with respect to ATS(C). We note that (ca i )i∈[1,n r ] is the
set of vertices to which neither a retriable nor a reliable business partner has been assigned. tsk a i (C) is the
generator of ca i present in ATS(C) and (va i j )j ∈[1,z a i ] denotes the set of vertices that are not canceled when ca i
fails. TS(Cd ) ={tscomp(Cd )}∪ ∪ni=r 1 (CTS(tsk a i (C), ca i ) −
za
∪j =i 1 FTS(va i j , ca i )).
TS(Cd ) is indeed derived from ATS(C) that contains for all
vertices at most a single coordination strategy as specified in
Definition 5.5. As a result, whenever the failure of a vertex ca
is detected, a transactional protocol in charge of coordinating
an instance Cd resulting from our approach reacts as follows.
The coordination strategy CS(Cd , tsk (C), (va i )i∈[1,z a ] , ca )
corresponding to ca is identified and a unique termination state belonging to CS(Cd , tsk (C), (va i )i∈[1,z a ] , ca ) can
be reached given the current state of the critical zone
execution.
D. Discussion and Performance Evaluation
In order to handle the scenarios wherein more than one business partner can fail at a time, one would need to extend the
definition of the termination state generator to take into account
the failure of a set of partners as follows.
Definition 6.7. A termination state of C tsk (C) is called generator of a set of vertices (ca i )i∈[1,p] iff ∀i ∈ [1, p] tsk (C, ca i ) ∈
{f ailed, Hf ailed} and ∀ b ∈ [1, n] such that cb is executed before one of the vertices (ca i )i∈[1,p] , or in parallel with all the
vertices (ca i )i∈[1,p] , tsk (C, cb ) ∈ {completed, compensated}.
The compatibility definition would also be defined for termination states in which exactly the same set of partners fail
at the same time so that coordination strategies are defined for
possible concurrent failures. In this case, two termination states
such that the set of failures in the first is a subset of the set of
failures in the second are not incompatible. The composition
algorithm and the coordination protocol are not affected by this
configuration.
The operations that are relevant from the complexity point of
view are twofold: the definition of transactional requirements
by means of the acceptable termination states model and the
execution of the transaction-aware business partner assignment
procedure.
One can argue that building an ATS table specifying the transactional requirements of a business process W consists of computing the whole TS(W ) table, yet this is not the case. Building
a ATS(C) set in fact only requires for designers to identify the
vertices of C that they allow to fail as part of the process execution and to select the termination state generator associated with
each of those vertices that meet their requirements in terms of
failure atomicity. Once this phase is complete, designers only
need to select the vertices whose execution can be canceled
327
when the former vertices may fail and complete the associated
coordination strategy.
The second aspect concerns the complexity of the transaction
aware assignment procedure that we presented in section VI.
Theorem 6.8. Let C = (ca )a∈[1,n ] be a critical zone. The
complexity of the transaction-aware assignment procedure is
O(n3 ).
Proof: We can show that the number of operations necessary
to compute the step i of the assignment procedure for a vertex ca
is bounded by 4 × n × i. Computing the step i indeed consists
of verifying Theorems 6.3–6.5 and determining ATS(C, ca ). On
one hand, performing the operations part of Theorems 6.3 (one
comparison), 6.4 (two comparisons), and 6.5 (one comparison)
requires at most four comparisons. On the other hand, building
ATS(C, ca ) requires at most n operations (there is at most n
generators in a ATS(C) set). Therefore, we can derive that the
number of operations that need to be performed in order to
compute the n steps of the assignment procedure for a�
critical
zone to be composed of n tasks is bounded by 4 × n × nj= 1 j
that is equivalent to n3 as n −→ ∞.
�
E. Example
We consider the critical zone C1 of Fig. 4. Designers have
defined ATS(C1 ) of Fig. 8 as the transactional requirements.
The set of available business partners for each vertex of C1
is specified in Fig. 8. The goal is to assign business partners
to vertices so that the instance of C1 is valid with respect to
ATS(C1 ) and we apply the presented assignment procedure.
The critical zone initiator assigned to v1 uses a business partner of type (rl , rt ) matching the transactional requirements. We
now start to assign the business partners of type (rl , rt c) and
(rl ) for which it is not necessary to compute any transactional
requirements. d52 which is the only available business partner
of type (rl , rt c) is therefore assigned to v4 . We then try to assign business partners to tasks for which there is no choice,
to m1 . We comand we verify whether d31 can be assigned �
2
2
) = ATS(C1 , m1 ) DIS(m1 , C1d
).
pute MinT P (da , m1 , C1d
2
ATS(C1 , m1 ) = {completed, Hf ailed} and DIS(m1 , C1d
)=
{Hf ailed} as d52 and d11 are the only business partner already assigned and the Theorems 6.3–6.5 are not verified. Thus,
2
MinT P (ca , m1 , C1d
) = {Hf ailed} and d31 can be assigned to
m1 as it matches the transactional requirements. We get for
3
v3 MinT P (da , v3 , C1d
) = {f ailed}. The business partner d41
that is of type (rl , c) verifies the transactional requirements is assigned to v3 . Now, we compute the transactional requirements of
4
v2 and we get MinT P (da , v2 , C1d
) = {f ailed, compensated}
as Theorem 6.3 is verified with the business partners d31 . The
partner d21 can thus be assigned to v2 as it matches the transactional requirements of the task. Using the created instance of
C1 we get the set TS(C1d ) of Fig. 9.
VII. COORDINATION PROTOCOL SPECIFICATION
Having introduced the method through which an instance
of C is obtained by assigning partners to workflow vertices
according to the transactional requirements of C, we turn to
the actual coordination of partners during the execution of the
�328
Fig. 9.
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
TS(C 1 d ).
Fig. 11.
Fig. 10.
Notification messages.
critical zone. The protocol that is in charge of the coordination is
specified in terms of the different actors, notification messages,
and coordination cases. We finally motivate the chosen solution
by comparing it with existing coordination protocols.
A. Protocol Actors
As mentioned in Section II-B and Fig. 2, we distinguish three
main entities within the coordination protocol execution.
1) Business partner dv1 = c1 : This business partner is the critical zone initiator and is in charge of performing the business partner assignment procedure and coordinating the
execution of C. The coordination decisions are made using the table T S(Cd ) specifying the subset of ATS(C) Cd
is actually able to reach.
2) Business partners dvk : these business partners modify sensitive data and play the role of subcoordinators. They report their state of execution and the state of execution of
v
the business partners dm
k to d1 .
m
3) Business partners dk : These partners modify volatile data
and report to the partner dvx most recently executed.
Actors exchange messages for the purpose of decision making
and forwarding, as listed in Fig. 10. These messages are mostly
derived from the state diagram of the transactional model and
the respective role of the partners in the protocol. The flow
of notification messages within the protocol execution and the
mechanisms involved in the processing of these notification
messages are stated in the next section.
B. Coordination Scenarios
In this section, we detail the different phases and coordination
scenarios that can be encountered during the execution of the
Business partner registration.
protocol. First, we explain how partners are registered with
the coordination protocol during the partner assignment phase.
Then, we analyze the message flow between the different actors
of the protocol in three different scenarios: normal course of
execution, failure of a partner dvk , and failure of a partner dm
k .
1) Business Partner Registration: The first phase of the coordination protocol consists of the discovery and registration of
the business partners that will be involved in the critical zone
execution. The discovery process through which business partners that can be assigned to critical zone vertices are identified
is performed by the business partner c1 = dv1 . The transactional
requirements extraction procedure, specified in Section VI-B,
provides the coordinator with a list of suitable business partners
that match the computed transactional requirements. It is then
necessary to contact the business partners of this list in order
to receive from of one of them the commitment to execute the
requested vertex. Based on the registration handshake depicted
in Fig. 11, the coordinator dv1 contacts a business partner asking it whether it agrees to commit to execute the operation a
of the workflow whose identifier is WI d . Once the newly assigned business partner’s coordinator is known, dv1 sends the
information. In the case of business partners dvk , this information is known from the beginning since dv1 is their coordinator
whereas, for the business partners dm
k , the information is known
when dvx the business partner dvk executed most recently has
been assigned to a vertex.
2) Normal Course of Execution: Once all involved business partners are known, the critical zone execution can start
supported by the coordination protocol. Business partners are
sequentially activated based on the workflow specification. A
sample for normal execution of C is depicted in Fig. 12. The
Activate(W, k, WI d , D) message is a workflow message defined in [4]; it especially contains the workflow specification
W , the requested vertex k to be executed, the workflow data
D modified during the execution, and the workflow identifier
WI d . Within the critical zone execution, local acknowledgments
Ack(WI d ) are used. Each business partner dm
k reports its status to the business partner dvx most recently executed, and once
its execution is complete, it can leave the critical zone execution. The Completed(k, WI d , D) message sent by a business
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
Fig. 12.
Fig. 14.
Normal execution.
329
Failure of a business partner dm
k .
problems, and failure of such partners therefore implies a loss
of contact with their coordinator. The failure of a partner dm
k
is reported by its subcoordinator to the partner dv1 . The failure
detection and forwarding of the Hf ailed message are depicted
in Fig. 14.
C. Coordination Decisions and Recovery
Fig. 13.
Failure of a business partner
dvk .
partner dm
k includes a backup copy of the volatile data modified by the business partner that can be reused later on for the
recovery procedure in case of failure of a business partner dm
k
(Section VII-B4). Once in the state completed, business partners of type dm
k can leave the coordination as they will not be
asked to compensate their execution. Depending on the transactional requirements defined for C, business partners dvk may
leave the critical zone before the end of the critical zone execution. A business partner dvk is indeed able to leave the coordination if it reaches the state completed regardless of possible
failures in the sequel of the critical zone execution. The condition allowing a business partner dvk to leave the coordination is
therefore stated as follows.
Theorem 7.1. A partner dvk assigned to a vertex cl can leave
the execution of a critical zone C iff the partner dvk is in the
state completed and ∀ i ∈ [1, n] such that a business partner di
not retriable (respectively, not reliable) is assigned to the vertex
ci , di is in the state initial and tsk (C, cl ) = completed where
tsk (C) is the termination state generator of ci in TS(Cd ).
3) Failure of A Business Partner dvk : This scenario is possible only with business partners of type (rl , p). We can encounter
two situations: either the failure is total and the business partner
is not able to communicate any longer or the business partner is
still alive and can forward a failure message to dv1 . Fig. 13 depicts
the two cases whereby the total failure is detected using a simple timeout in Ping/Alive message exchanges. Once the failure
has been detected, the coordinator forwards the coordination
decision to all involved business partners. It should be noted
here that business partners of type (rl , rt ) can also reach the
state f ailed but the retriability property implies that they have
at their disposal recovery solutions ensuring that the contact is
never lost permanently. Thus, the failure of business partners
of type (rl , rt ) is transparent to the rest of the coordination and
does not have to be handled.
4) Failure of A Business Partner dm
k : The failure of a business partner dm
k is detected by its subcoordinator with a timeout.
As specified in the transactional model, we indeed consider that
business partners of type dm
k can fail only because of hardware
Having detailed various coordination scenarios that can occur
during the execution of a critical zone, we analyze the possible
recovery strategies, in particular the replacement of failed partners dvk and dm
k and how coordination decisions are made upon
detection of a failure.
1) Replacement of Failed Partners dvk : During the course of
the execution, new partners can be discovered and assigned to
vertices in order to replace failed ones. In fact, two situations
can happen: either the failure of a partner occurs while executing its assigned vertex or the coordinator loses contact (timeout
detection) prior to the activation of the partner. The first situation is specified in the previous section, and no backup solution
is possible as the data modified by the failed business partner
are in an unknown state. In the second situation, it is possible
on the contrary to assign a new business partner matching the
transactional requirements to the vertex that has not yet started
with the execution. Once the loss of contact with a business
partner dvk is detected, no coordination decision is yet sent to
business partners and the execution continues. If no business
partner is found to be assigned to the vertex when its execution should be activated, the protocol coordinator considers the
business partner it has lost contact with as failed.
2) Replacement of Failed Business Partners dm
k : In case of
failure of a business partner dm
k , be it before or after its activation, a recovery procedure can be executed prior to informing
the coordinator of the hardware failure. It is indeed possible to
assign to the vertex a new business partner so that the execution
can go on. This is possible as, on the one hand, the partners
dm
k only modify volatile data, and on the other hand, we have a
backup copy of the data modified by the partners that are part of
the abstract vertex dm
l,p . Once the failure is detected, the subcoordinator of the failed partner tries to assign a new partner to the
failed vertex. In this case, only volatile data are being modified,
transactional requirements is not a concern, and the assignment
procedure can be repeated till a business partner manages to
execute the requested vertex.
3) Reaching Consistent Termination States: Once all possible recovery mechanisms have been attempted, a coordination
decision is made by the coordination dv1 . The table TS(Cd ) is
the input to the coordination decisions that are made throughout
�330
Fig. 15.
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
Architecture.
the execution of a critical zone. Once the failure of a vertex ca
has been detected, the protocol coordinator reads in TS(Cd ) the
set CS(Cd , tsk (C), (va i )i∈[1,z a ] , ca ) listing the possible termination states reachable by Cd whereby ca is f ailed. There is a
unique element of this set that is reachable by Cd with respect to
its current state of execution and dv1 sends the appropriate messages so that the overall critical zone can reach this consistent
termination state.
D. Discussion
The coordination protocol integrates the semantic description
of involved business partners and relies on an adaptive decision
table that is computed during the assignment procedure. The
coordination protocol is flexible as it completely depends on
the designers’ choice for the specification of ATS. This solution
therefore offers a full support of relaxed atomicity constraints
for workflow-based applications and is also self-adaptable to the
business partners characteristics that is not the case with recent
efforts [14], [15].
The organization of the coordination is based on a simple
hierarchical approach as in BTP [16]. In that respect, the central
point of the coordination is the business partner dv1 on which
relies the whole coordination. This is the main weakness of the
protocol, as a failure of this business partner would cause the
complete failure of the workflow execution. The role of critical zone initiator of the coordination is therefore reserved to
business partners that are both reliable and retriable. Nonetheless, this centralized and hierarchical approach facilitates the
management of the coordination process.
In addition to usual coordination phases such as coordination registration, business partner completion, and failure, our
protocol offers the possibility to replace participants at runtime depending on their role within the coordination and the
volatility degree of data they have to modify during the workflow execution. This makes the protocol flexible and adapted to
the pervasive paradigm whereas such recovery procedure is not
specified in other transactional protocols.
In the protocol description, we do not specify the data recovery strategy especially for the compensated states. Different
approaches can be integrated with our work to support either
forward error recovery or backward error recovery [17]. The
choice of the recovery strategy basically depends on the application and its fault-handling protocol. For instance, a simple
backward error recovery strategy is sufficient for workflows
used for payment in the example of the paper whereas a forward recovery strategy might be required for a hotel booking
system. Existing mechanisms in this area can therefore be used
to augment our transactional protocol to specify complex faulthandling and compensation scenarios [8], [18].
VIII. IMPLEMENTATION
In this section, an implementation of the work presented in
this paper is described. The overall system architecture is depicted in Fig. 15. The basic pervasive workflow infrastructure
spans over the business partners taking part in a workflow instance. A local workflow engine developed on top of BPEL [8]
is in charge of handling, for each involved business partner, the
workflow management and control tasks that mainly consist of:
1) receiving and forwarding workflow requests;
2) issuing discovery requests;
3) invoking the appropriate local services to execute workflow tasks.
In order to support the execution of pervasive workflows,
we implemented in the fashion of the WS-coordination initiative [19] a transactional stack composed of the following
components.
1) Transactional coordinator: This component is supported
by a critical zone initiator. On the one hand, it implements
the transaction-aware business partner assignment procedure as part of the composition manager module, and on
the other hand, it is in charge of assuring the coordinator role of the transactional protocol relying on the set
T S(Cd ) outcome of the assignment procedure.
2) Transactional submanager: This component is deployed
on the other partners and is in charge of forwarding coordination messages from the local workflow to the appropriate subcoordinator or coordinator and conversely.
In the remainder of this section, we focus on the implementation of the transaction-aware partner assignment procedure.
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
Fig. 16.
OWL-S transactional matchmaker.
A. OWL-S Transactional and Functional Matchmaker
To implement the assignment procedure presented in this
paper, we augmented an existing functional OWL-S matchmaker [20] with transactional matchmaking capabilities. In order to achieve our goal, the matchmaking procedure has been
split into two phases. First, the functional matchmaking based
on OWL-S semantic matching is performed in order to identify subsets of the available partners that meet the functional
requirements for each workflow vertex. Second, the implementation of the transaction-aware partner assignment procedure
is run against the selected sets of partners in order to build
an acceptable instance fulfilling defined transactional requirements.
The structure of the matchmaker consists of several components whose dependencies are displayed in Fig. 16. The composition manager implements the matchmaking process and
provides a Java API that can be invoked to start the selection
process. It gets as input an abstract process description specifying the functional requirements for the candidate partners
and a table of acceptable termination states. The registry stores
OWL-S profiles of partners that are available. Those OWL-S
profiles have been augmented with the transactional properties
offered by business partners. This has been done by adding to
the nonfunctional information of the OWL-S profiles a new element called transactional properties that specifies three Boolean
attributes that are retriable, reliable, and compensatable as follows.
<tp:transactionalproperties
retrible=“true”
reliable=“true”
compensatable=“true”/>
In the first phase of the selection procedure, the business
partner manager is invoked with a set of OWL-S profiles that
specify the functional requirements for each workflow vertex.
The business partner manager gets access to the registry, where
all published profiles are available, and to the functional matchmaker that is used to match the available profiles against the
functional requirements specified in the workflow. For each
331
workflow vertex, the business partner manager returns a set
of functionally matching profiles along with their transactional
properties. The composition manager then initiates the second
phase, passing these sets along with the process description, and
the table of acceptable termination states to the transactional
composer. The transactional composer starts the transactionaware business partner assignment procedure using the transactional matchmaker by classifying first those sets into six
groups.
1) Sets including only business partners of type (url ,rt ).
2) Sets including only business partners of type (rl ,rt ).
3) Sets including only business partners of type (rl ,p).
4) Sets including only business partners of type (rl ,c).
5) Sets including business partners of types (rl ,rt ) and (rl ,c).
6) Sets including business partners of type (rl ,rt c).
Once those sets are formed, the iterative transactional composition process takes place as specified before based on the table
of acceptable termination states. Depending on the set of available services and the specified acceptable termination states, the
algorithm may terminate without finding a solution.
IX. RELATED WORK
Transactional consistency and correctness of distributed systems such as database systems has been an active research topic
over the last 15 years [21]–[23] yet it is still an open issue in the
area of distributed processes within the SOC [24]–[27]. In this
paper, we specified a transactional protocol for the pervasive
workflow architecture presented in [4], and our solution uses
and extends the results proved in [9].
The execution of distributed processes wherein business partners are not assigned at design time raises new requirements
for transactional systems such as dynamicity, semantic description, and relaxed atomicity. Existing transactional models for
advanced applications and workflows [5] do not offer the flexibility to integrate these requirements [28]. Our solution allows
the specification of transactional requirements supporting relaxed atomicity for an abstract workflow specification and the
selection of semantically described business partners or services
fulfilling the defined transactional requirements. In addition, we
provide the means to compute a coordination protocol suited
to the workflow instance resulting from our business partner
assignment procedure.
The first approach specifying relaxed atomicity requirements
for Web-service-based workflow applications using the ATS
tool and a transactional semantic is presented in [10]. Despite
a solid contribution, this paper provides only some means to
verify the consistency of composite services but it does not
take into account transactional requirements at the composition phase. This work therefore appears to be limited when it
comes to the possible integration into dynamic and distributed
business processes. In this approach, transactional requirements
do not play any role in the component business partners selection process that may result in several attempts to determine a
valid workflow instance. As opposed to this work, our solution
provides a systematic procedure enabling the creation of valid
workflow instances by means of a transaction-aware business
�332
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART C: APPLICATIONS AND REVIEWS, VOL. 38, NO. 3, MAY 2008
partner assignment procedure. A transactional Web service composition framework is also presented in [29], yet this approach
does not allow to define coordination strategies as fine-grained
as the termination state model underpinning our composition
algorithm.
The transactional protocol we propose offers suitable means
to respond to the constraints introduced by environments where
heterogeneous business partners share resources in a collaborative manner. Using relaxed atomicity features, the protocol indeed offers the flexibility for business partners to release
their resources as soon as their participation to the workflow is
no longer required. Moreover, using a flexible semantic, business partners are able to advertise their capabilities so that they
can assume a role suited to any workflow in which their resources can be used. Current efforts in the design of transactional
framework supporting the coordination of business processes
[14], [15], [30], [31] do not offer such flexibility. They suffer from the lack of tools for the specification of transactional requirements and their integration into a dynamic business partners’ selection process. As opposed to our solution,
the WS-BA specification and its implementation [32], for instance, do not provide designers with the adequate means to
specify the business logic associated with their long-running
transactions. Furthermore, no recovery procedure is specified as
part of the protocol for the replacement of partners in case of
failure.
X. CONCLUSION
We presented an adaptive transactional protocol developed in
the scope of the pervasive workflow model [4]. The contributions of the paper are threefold. First, we provide a transactional
model that captures the typical transactional properties associated with Web services and make it possible for business partner
to advertise the latter as a nonfunctional attribute to potential
clients. This transactional model and its associated semantic
are actually the core of the overall approach and consider the
transactional properties offered by business partner as part of
the SLA. Second, we propose a composition algorithm whose
goal is to mix the transactional properties offered by business
partners in order to meet some transactional constraints identified by workflow application designers. This algorithm does not
only build consistent workflow instances but also provides the
coordination rules to adequately coordinate the workflow execution. These rules are directly derived from the requirements
set by designers in the first place and also from the composite application outcome of the assignment procedure. Third,
we propose a transactional protocol that meet the dynamicity
requirements introduced by a flexible execution environment.
We believe that our approach can be used to augment recent
specifications [19] in increasing their flexibility to incorporate
transactional properties of business partners in the definition of
adaptive coordination rules. Besides, a complete transactional
framework has been implemented as a proof of concept of our
theoretical results. Future work will focus on the design of security solutions for the pervasive workflow model.
APPENDIX
REFERENCES
[1] A. Ranganathan and S. McFaddin, “Using workflows to coordinate web
services in pervasive computing environments,” in Proc. IEEE Int. Conf.
Web Serv., 2004, pp. 288–295.
[2] Web services tool kit for mobile devices. (2002) [Online]. Available:
http://www.alphaworks.ibm.com/tech/wstkmd.
[3] S. Berger, S. McFaddin, C. Narayanaswami, and M. Raghunath, “Web
services on mobile devices—Implementation and experience,” in Proc.
5th IEEE Workshop Mobile Comput. Syst. Appl., 2003, pp. 100–109.
[4] F. Montagut and R. Molva, “Enabling pervasive execution of workflows,”
in Proc. 1st IEEE Int. Conf. Collaborative Comput.: Netw., Appl. Worksharing, CollaborateCom, 2005, p. 10.
[5] A. K. Elmagarmid, Database Transaction Models for Advanced Applications. San Mateo, CA: Morgan Kaufmann, 1992.
[6] P. Greenfield, A. Fekete, J. Jang, and D. Kuo, “Compensation is not
enough,” in Proc. 7th Int. Enterprise Distrib. Object Comput. Conf.
(EDOC 2003), pp. 232–239.
[7] OWL-s specifications. (2003) [Online]. Available: http://www.daml.org/
services.
[8] Business process execution language for web sevices [Online]. Available:
http://www.ibm.com/developerworks/library/ws-bpel/
[9] F. Montagut and R. Molva, “Augmenting Web services composition with
transactional requirements,” in Proc. IEEE Int. Conf. Web Serv. (ICWS
2006), Chicago, IL, Sep. 18–22.
[10] S. Bhiri, O. Perrin, and C. Godart, “Ensuring required failure atomicity of
composite web services,” in Proc. 14th Int. Conf. World Wide Web, 2005,
pp. 138–147.
[11] S. Mehrotra, R. Rastogi, A. Silberschatz, and H. Korth, “A transaction
model for multidatabase systems,” in Proc. 12th IEEE Int. Conf. Distrib.
Comput. Syst. (ICDCS 1992), pp. 56–63.
[12] H. Schuldt, G. Alonso, and H. Schek, “Concurrency control and recovery
in transactional process management,” in Proc. Conf. Principles Database
Syst., 1999, pp. 316–326.
[13] M. Rusinkiewicz and A. Sheth, “Specification and execution of transactional workflows,” in Modern Database Syst.: The Object Model,
Interoperability, Beyond. Reading, MA: Addison-Wesley, 1995, pp.
592–630.
[14] D. Langworthy, L. F. Cabrera, and G. Copeland [Online]. Available:
http://docs.oasis-open.org/ws-tx/wstx-wast-1.1-spec-os.pdf
[15] D. Langworthy, L. F. Cabrera, and G. Copeland [Online]. Available:
http://docs.oasis-open.org/ws-tx/wstx-wsba-1.1-spec-os.pdf
[16] M. Abbott, A. Berson, and G. Brown [Online]. Available:
http:/ /www.oasis-open.org/committees/download.php/1184/2002-06-03.
BTP_cttee_spec_1.0.pdf
[17] P. A. Lee and T. Anderson, Fault Tolerance: Principles and Practice.
San Mateo, CA: Morgan Kaufmann, 1990.
[18] F. Tartanoglu, V. Issarny, A. Romanovsky, and N. Levy, “Coordinated
Forward error recovery for composite Web services,” in Proc. 22nd Int.
Symp. Reliable Dist. Sys., 2003.
[19] D. Langworthy, L. F. Cabrera, and G. Copeland [Online]. Available:
http://docs.oasis-open.org/ws-tx/wstx-wascoor-1.1-spec-os.pdf
�MONTAGUT et al.: PERVASIVE WORKFLOW: A DECENTRALIZED WORKFLOW SYSTEM
[20] P. Doshi, R. Goodwin, and R. Akkiraju, “Parameterized semantic matching
for workflow composition,” International Business Machines Corporation
(IBM), Armonk, NY, Tech. Rep. RC23133, Mar. 2004.
[21] J. Gray and A. Reuter, Transaction Processing: Concepts and Techniques.
San Mateo, CA: Morgan Kaufmann, 1993.
[22] S. Lu, A. Bernstein, and P. Lewis, “Automatic workflow verification and
generation,” Theor. Comput. Sci., vol. 353, no. 1, pp. 71–92, 2006.
[23] S. Lu, A. Bernstein, and P. Lewis, “Correct execution of transactions at
different isolation levels,” IEEE Trans. Knowl. Data Eng., vol. 16, no. 9,
pp. 1070–1081, Sep. 2004.
[24] F. Curbera, R. Khalaf, N. Mukhi, S. Tai, and S. Weerawarana, “The
next step in web services,” Commun. ACM, vol. 46, no. 10, pp. 29–34,
2003.
[25] M. Gudgin, “Secure, reliable, transacted; innovation in Web services architecture,” presented at the ACM Int. Conf. Manag. Data, Paris, France,
2004.
[26] M. Little, “Transactions and Web services,” Commun. ACM, vol. 46,
no. 10, pp. 49–54, 2003.
[27] S. Tai, R. Khalaf, and T. Mikalsen, “Composition of coordinated web
services,” in Middleware 2004: Proc. 5th ACM/IFIP/USENIX Int. Conf.
Middleware, New York, pp. 294–310.
[28] G. Alonso, D. Agrawal, A. E. Abbadi, M. Kamath, R. Gnthr, and
C. Mohan, “Advanced transaction models in workflow contexts,” in Proc.
12th Int. Conf. Data Eng., Feb., 1996, p. 574.
[29] M.-C. Fauvet, H. Duarte, M. Dumas, and B. Benatallah, “Handling transactional properties in web service composition,” in Proc. 6th Int. Conf.
Web Inf. Syst. Eng. (WISE 2005), New York, pp. 273–289.
[30] G. Alonso, F. Casati, H. Kuno, and V. Machiraju, Web services: Concepts,
Architectures, and Applications. New York: Springer-Verlag, 2003.
[31] M. P. Papazoglou, “Web services and business transactions,” World Wide
Web, vol. 6, no. 1, pp. 49–91, 2003.
[32] Apache kandula. (2007). [Online]. Available: http://ws.apache.org/ kandula/.
Frederic Montagut (S’05) received the Eng. Dipl.
in telecommunications from Telecom International,
Evry, France, in 2004, the M.Sc. degree in network
and distributed systems from Nice University, Nice,
France, in 2004, and the Ph.D. degree in computer
science from the Systems, Applications and Products (SAP) Research Laboratory, Mougins, France,
in 2007.
Since October 2004, he has been with the SAP
Research Laboratory. His current research interests
include workflow systems and workflow coordination to workflow security.
333
Refik Molva (M’88) received the B.Sc. degree in
computer science from Joseph Fourier University,
Grenoble, France, in 1981, and the Ph.D. degree
in computer science from Paul Sabatier University,
Toulouse, France, in 1986.
He is currently a Full Professor and the Head
of the Department of Computer Communications,
Eurecom Institute, Sophia Antipolis, France. He was
also a Research Staff Member in the Zurich Research
Laboratory, International Business Machines Corporation (IBM), where he was a Key Designer of the
KryptoKnight system. During 1997, he was a Security Consultant at the IBM
Consulting Group. He was engaged in research on multicast and mobile network
security, anonymity, intrusion detection, distributed multimedia applications
over high-speed networks, and network interconnection. His current research
interests include security protocols for self-organizing systems and privacy.
Silvan Tecumseh Golega received the B.Sc. degree
in computer science in 2006 from Hasso-PlatnerInstitut, Postdam, Germany, where he is currently
working toward the Master’s degree in computer
science.
He was engaged in research on “composition and
coordination of transactional business processes.”
�
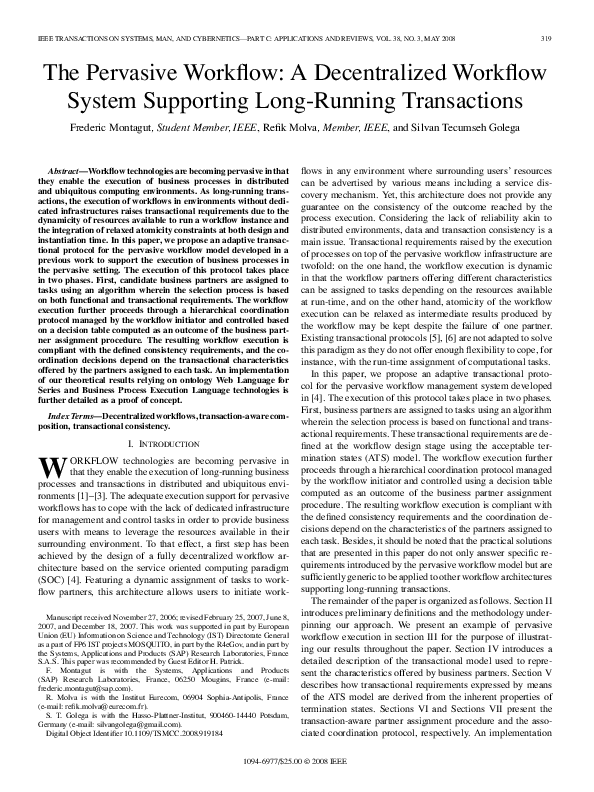
 Silvan T. Golega
Silvan T. Golega