Temporal Isolation on Multiprocessing Architectures ∗
Dai Bui
University of California, Berkeley
Berkeley, CA
Isaac Liu
Edward A. Lee
University of California, Berkeley
Berkeley, CA
University of California, Berkeley
Berkeley, CA
liuisaac@eecs.berkeley.edu
eal@eecs.berkeley.edu
daib@eecs.berkeley.edu
Hiren D. Patel
Jan Reineke
University of Waterloo
Waterloo, Ontario, Canada
hdpatel@uwaterloo.ca
University of California, Berkeley
Berkeley, CA
reineke@eecs.berkeley.edu
ABSTRACT
General Terms
Multiprocessing architectures provide hardware for executing multiple tasks simultaneously via techniques such as simultaneous multithreading and symmetric multiprocessing.
The problem addressed by this paper is that even when tasks
that are executing concurrently do not communicate, they
may interfere by affecting each other’s timing. For cyberphysical system applications, such interference can nullify
many of the advantages offered by parallel hardware. In this
paper, we argue for temporal semantics in layers of abstraction in computing. This will enable us to achieve temporal
isolation on multiprocessing architectures. We discuss techniques at the microarchitecture level, in the memory hierarchy, in on-chip communication, and in the instruction-set
architecture that can provide temporal semantics and control over timing.
Design
Categories and Subject Descriptors
C.1.3 [Computer Systems Organization]: Processor Architectures—Other Architecture Styles; C.3 [Special-Purpose
and Application-Based Systems]: real-time and embedded systems; J.7 [Computers in Other Systems][computerbased systems]
∗This work was supported in part by the Center for Hybrid
and Embedded Software Systems (CHESS) at UC Berkeley,
which receives support from the National Science Foundation (NSF awards #0720882 (CSR-EHS: PRET), #0931843
(ActionWebs), and #1035672 (CSR-CPS Ptides)), the U. S.
Army Research Office (ARO #W911NF-07-2-0019), the U.
S. Air Force Office of Scientific Research (MURI #FA955006-0312), the Air Force Research Lab (AFRL), the Multiscale Systems Center (MuSyC), one of six research centers
funded under the Focus Center Research Program, a Semiconductor Research Corporation program, and the following
companies: Bosch, National Instruments, Thales, and Toyota.
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are
not made or distributed for profit or commercial advantage and that copies
bear this notice and the full citation on the first page. To copy otherwise, to
republish, to post on servers or to redistribute to lists, requires prior specific
permission and/or a fee.
DAC ’11 San Diego, California USA
Copyright 20XX ACM X-XXXXX-XX-X/XX/XX ...$10.00.
Keywords
Precision-timed architectures, microarchitecture, pipelines,
memory hierarchy, network on chip, instruction set architecture
1. INTRODUCTION
A cyber-physical system (CPS) uses embedded computers
to monitor and control physical processes [8]. These systems
are typically in feedback loops such that the physical processes affect the behavior of the computation, and vice versa.
Note two important aspects of physical processes: they are
inherently concurrent, and time in physical processes progresses at its own pace; time is uncontrollable. Therefore,
to control physical processes, embedded computers need to
provide support for concurrent behaviors and timely reactions.
Modern embedded computing architectures are becoming increasingly parallel by using multiprocessing techniques
such as multicores and simultaneous multithreading (SMT).
These parallel architectures deliver higher performance and
also address the need for concurrency. However, ensuring
that real-time requirements are met is a challenge in such
architectures. A major problem is that multiprocessing techniques can introduce temporal interference even between
logically independent behaviors.
For example, in a multicore machine with shared caches,
the processes running on one core can affect the timing
of processes on another core even when there is no communication between these processes. Similarly, SMT [4]
shares a wide-issue superscalar pipeline across multiple hardware threads with instructions dispatched using scoreboaring mechanisms. This allows threads to occupy more pipeline
resources when other threads are idle or stalled for long latency operations. This results in temporal interference between the threads because of the contention for pipeline
resources.1 On the other hand, symmetric multiprocessing (SMP) techniques use multiple processing units connected with an on-chip communication interconnect such as
1
Several research groups have introduced ways to mitigate
the temporal interference in SMTs by allocating a real-time
thread with the highest priority [2], time-sharing the realtime thread [12], and partitioning the instruction cache [11].
�a bus or network-on-chip. SMP exploits thread-level parallelism by designating a thread to a different processing unit.
While this removes temporal interference caused by sharing
pipeline resources between multiple threads, temporal interference is reintroduced at the on-chip communication interconnect. For instance, sharing the same off-chip memory
between processing units requires arbitration and coherence,
which results in temporal interference. In fact, any sharing
of resources such as busses, memories, switches, buffers, and
I/O devices can result in temporal interference.
Programming multiprocessing architectures for CPS applications is another challenge. Model-based design advocates software synthesis from higher-level models, where the
models themselves can have temporal semantics. For example, MathWorks Simulink R models can specify periodic
behaviors, and tools such as Real-Time Workshop R and
dSPACE TargetLink R can synthesize multithreaded C code
for execution on embedded processors. But ensuring that
the real-time behavior of the deployed application matches
the original model is becoming increasingly difficult with
multiprocessing architectures.
We contend that software synthesis to multiprocessing
architectures for time-critical applications could be made
much easier if we could ensure temporal isolation across
well-defined boundaries. Temporal isolation enables multiple processes to execute concurrently without having an
impact on another process’ temporal behavior.
To provide temporal isolation, it will never be enough to
just generate C code and hope for the best. There has to be
underlying support. This will require changes at lower levels
of abstraction, which brings us to the purpose of this paper:
to examine what changes need to be made at the lower levels
to support temporal isolation for effective software synthesis
for multiprocessing architectures.
It is certainly possible to achieve temporal isolation on
just about any hardware by overprovisioning. This means
providing sufficient resources so that there is no contention
for them. This does not preclude sharing of resources, but it
does constrain how the sharing is done. Time-division multiple access (TDMA) schemes, for example, share resources
by dividing their access into fixed time slots. This is commonly done in distributed real-time systems, using TDMA
busses such as ARINC, TTP, and FlexRay. The constraints
imposed by TDMA, however, make software less reactive
and often result in considerable overdesign, where for example sensors are polled at high rates to avoid having to design
a reactive response.
Minimizing temporal interference requires more control
over shared resources [9]. This includes anything that performs switching and routing in a network-on-chip (NoC),
as well as shared buses, shared caches and memories, cache
coherence protocols, and task scheduling policies that work
across processor resources.
In this paper, we begin with low levels of abstraction and
work our way up. We begin with a brief discussion of the
relevant layers of abstraction. Then we discuss what we believe must change at the microarchitecture level, the memory
architecture, the NoC, and the instruction-set architecture
(ISA), in that order. We also believe that profound changes
are required in higher-level programming models, but that
discussion is out of scope for this paper. We conclude the paper with some simple illustrations of how to take advantage
of temporal isolation.
2. ABSTRACTION LAYERS NEED TIME
Although computers are concretely implemented using circuits, programs and applications are designed using higherlevel abstractions. These abstractions include microarchitectures, instruction-set architectures (ISAs), programming
languages, operating systems, and concurrent models of computation.
At the lowest levels of abstraction, circuits and microarchitectures, timing is central to correctness. If in a microarchitecture, for example, the output of an ALU is latched at
the wrong time, the ISA will not be correctly implemented.
At higher levels, however, timing is hidden. An ISA typically has no temporal semantics at all. The time it takes to
realize an instruction in the ISA is irrelevant to correctness.
Achieving temporal isolation at the higher levels alone,
therefore, will be challenging. Time is not part of the semantics, making it impossible to control. As a result, designers
are forced to reach down into the lower levels of abstraction.
For example, execution-time analysis of programs today requires detailed modeling of microarchitectures.
In this paper, we argue that we should revisit and rethink
each of these layers, judiciously introducing some form of
temporal semantics. This will make it possible to achieve
temporal isolation without always reaching down to the lowest levels of abstraction.
3. MICROARCHITECTURE
Multithreaded microarchitectures enable true concurrency
of tasks for embedded applications on a single core. This
is attractive because embedded applications are inherently
concurrent. However, when general purpose multithreaded
microarchitectures implements ISAs, temporal interference
is introduced when the hardware dynamically manages the
underlying architectural resources. For example, simultaneous multithreaded architectures try to fill a multi-issue wide
pipeline with its multiple threads dynamically. This allows
more efficient use of the resources since idle threads will not
consume any resources and the busier threads can in turn
use more resources and finish quicker. But as a result, a
thread’s resource consumption directly depends on the activity of other threads sharing the core.
Several techniques have been proposed to remove temporal interference for multithreaded architectures. In particular, Mische et al. [12] used a simultaneous mulithreaded
architecture and assigned a top priority to a thread dedicated as the real-time thread. The architecture was modified slightly to allow interruption of instruction execution
and rollback. The modification allows the real-time thread
to access any hardware resource it needs by interrupting
execution of other lower priority threads. This guarantees
temporal isolation for the real-time thread, but not for any
other thread running on the core. If multiple real-time tasks
are needed, then a time sharing of the real-time thread
is required. A more static approach was proposed by ElHaj-Mahmoud et al. [5] called the virtual multiprocessor.
The virtual multiprocessor uses static scheduling on a multithreaded superscalar processor to remove temporal interference. The processor is partitioned into different time slices
and superscalar ways, which are used by a scheduler to construct the thread execution schedule offline.
The precision timed machine (PRET) project reintroduces
computer architecture with time as its first class citizen.
�Our realization of PRET [10] employs a thread-interleaved
5 stage pipeline. The thread-interleaved pipeline contains
four hardware threads that run in the pipeline. Instead of
dynamically scheduling the execution of the threads, a predictable round-robin thread schedule is used to remove temporal interference. The round-robin thread schedule fetches
a different thread every cycle, removing data hazard stalls
stemmed from the pipeline resources. Unlike the virtual
multiprocessor, the tasks on each thread need not be determined a priori, as hardware threads cannot affect each
other’s schedule. Unlike Mische et al. [12]’s approach, all
the hardware threads in our architecture can be used for
real time purposes.
Multi-core architectures also allow true concurrent execution of tasks on multiple cores. Although tasks execute on
separate cores, timing interference still exists due to contention from the memory architecture or communication
fabric. Thus, the challenge of using multi-core architectures
to remove timing interference from the arbitration of the
shared components. The MERASA [17] project propose an
interference-aware bus arbiter to bound the interference for
real-time tasks. The bus arbiter splits the arbitration from
within a core and in between cores. Real-time bus requests
are given priority, and when multiple real-time requests are
present, a round-robin policy is used for arbitration. The
MERASA project also propose an analyzable memory controller which bounds the interference of memory accesses
using a similar arbitration scheme as their bus arbiter. Pitter et al. [13] designed a Java chip multiprocessor with one
shared memory, and evaluated different arbitration schemes
to access the shared memory. They concluded that a TDMA
arbitration is the key component enabling WCET analysis
of memory accesses. In the following sections we discuss
more about the memory hierarchy and network-on-chip.
4. MEMORY HIERARCHY
4.1
Caches and Scratchpad Memories
There is a large gap between the latency of current processors and that of large memories. Thus, a hierarchy of memories is necessary to provide both low latencies and large
capacities. In conventional architectures, caches are part of
this hierarchy. In caches, a replacement policy, implemented
in hardware, decides which parts of the slow background
memory to keep in the small fast memory. Replacement
policies are hardwired into the hardware and independent
of the applications that are running on the architecture.
Without further adaptation, caches do not provide temporal isolation: the same application, processing the same
inputs, may exhibit wildly varying cache performance depending on the state of the cache when the application’s execution begins [18]. The cache’s state is in turn determined
by the memory accesses of other applications running earlier. Thus, the temporal behavior of one application depends
on the memory accesses performed by other applications. In
multi-core systems, caches are shared among several cores.
In such systems, temporal interference between different applications is more immediate: memory accesses of applications running on different cores are interleaved; an access
of one application may cause eviction of a memory block of
another application, and thus incur additional cache misses
later.
A solution to avoid at least some of the interferences in
caches described above are partitioned caches. Different applications and/or different cores are assigned partitions of
the cache, and can therefore not interfere with each other.
In such a scheme, an application’s temporal behavior still
depends on the state of the cache at the end of the previous execution of the same application. Some caches allow to
lock their contents, to eliminate such interferences.
Scratchpad memories (SPMs) are an alternative to caches
in the memory hierarchy. The same memory technology that
is employed to implement caches is also used in SPMs, static
random access memory (SRAM), which provides constant
low-latency access times. In contrast to caches, however, an
SPM’s contents are under software control: the SPM is part
of the addressable memory space, and software can copy instructions and data back and forth between the SPM and
lower levels of the memory hierarchy. Accesses to the SPM
will be serviced with low latency, predictably and repeatably. However, similar to the use of the register file, it is the
compiler’s responsibility to make correct and efficient use of
the SPM. This is challenging, in particular when the SPM is
to be shared among several applications, but it also presents
the opportunity of high efficiency, as the SPM management
can be tailored to the specific application, in contrast to the
hardwired cache replacement logic.
4.2
Dynamic Random Access Memory
At the next lower level of the memory hierarchy, many systems employ Dynamic Random Access Memory (DRAM).
DRAM provides much greater capacities than SRAM, at
the expense of higher and more variable access latencies.
Conventional DRAM controllers do not provide temporal
isolation. As with caches, access latencies depend on the
history of previous accesses to the device.
DRAM devices consist of a set of independent banks, each
of which stores data in DRAM cells in a two-dimensional
matrix organized in rows and columns. In order to access
a memory block in a particular bank, a memory controller
needs to first transfer the row containing the memory block
into the row buffer, by issuing a row access command. Then,
it can access contiguous parts of this row by column access
commands. Subsequent accesses to the same row need not
transfer the row into the row buffer again. The latency of a
memory access thus depends on whether the accessed memory block is contained in the same row as the immediately
preceding access to the same bank.
Modern DRAM controllers reorder accesses to minimize
row accesses and thus access latencies. As the data bus and
the command bus, which connect the processor with the
DRAM device, are shared between all of the banks of the
DRAM device, controllers also have to resolve competition of
for these resource by different competing memory accesses.
We are currently developing a DRAM controller, which
provides temporal isolation among different clients. This
controller allocates private banks to different clients. In
addition, it employs a time-triggered access scheme to the
shared address and data bus. This completely decouples the
access latencies of clients from one another.
Previous related work by Akesson et al. [1] achieves temporal isolation differently: the backend of the controller,
which issues commands to the DRAM device provides bounds
on access latencies. Interference between different clients is
bounded by arbitration schemes such as CCSP or RoundRobin. Given the guarantees provided by the backend and
�the arbitration mechanism, the approach of Akesson et al. is
to delay response to every memory access to the worst case.
5. ON-CHIP COMMUNICATION
General-purpose on-chip networks are built to maximize
throughput. They dynamically route packets through the
network. Packets from different sources compete for the
limited capacity of the network. The latency of a packet
depends on the current network activity and the routing decisions taken by the network. Thus, without further adaptation, such networks do not provide temporal isolation between different applications. In the following, we discuss
two approaches that can achieve predictable performance or
temporal isolation for on-chip communication.
The Æthereal network-on-chip [6], from NXP, uses a timedivision multiple-access (TDMA) scheme for packets that
are subject to guaranteed service constraints. Guaranteedservice packets are sent in fixed-length slots. Contention is
avoided in two ways: by globally scheduling the packet injection from network nodes at network interfaces, and by
using contention-free routing that solves contention by delaying packets at source nodes. Global scheduling limits the
scalability of this approach. In Æthereal, TDMA slot allocation is not done at runtime, presumably to prevent temporal
interference, but this prevents the application software from
exploiting path diversity to avoid congestion.
Rosen et al. [14] propose optimizing a TDMA bus schedule to minimize program worst-case execution time (WCET)
for chip multiprocessors (CMPs). The paper also shows that
more complicated TDMA bus schedules could result in better performance but would make the bus scheduler implementation complicated and costly. Our ISA extensions, described below, can be used to implement more complicated
bus access patterns in software instead of at the pure hardware level.
An alternative to TDMA are priority-based mechanisms.
Such mechanisms do, however, introduce temporal interference between different applications. Shi et al. [15] show how
to analyze such a priority-based mechanism to determine
latency bounds.
6. INSTRUCTION SET ARCHITECTURES
Common instruction set architectures (ISAs) do not have
a temporal semantics, i.e., the time it takes to execute a
sequence of instructions is not constrained by the ISA at
all. Different microarchitectural realizations of the same
ISA may exhibit completely different timing behavior. In
fact, the execution time of a program may even vary from
one execution to the next on the same microarchitectural
realization.
On the other hand, higher-level models, expressed using
e.g. MathWorks Simulink R , do have temporal semantics.
To synthesize binaries from such higher-level models, tools
such as Real-Time Workshop R can generate C code, which
is then compiled into a binary of an instruction set architecture. As neither the C code nor the binary exhibit temporal
semantics, designers are forced to reach down into the microarchitectural level to verify that the temporal constraints
of the higher-level model are met. For example, executiontime analysis of programs today requires detailed modeling
of microarchitectures.
We propose to endow ISAs with temporal semantics and in
particular with instructions that enable control over timing.
This, in turn enables control over timing at the C level,
which can be used to implement higher-level models with
temporal semantics.
6.1
Four Desirable Capabilities of an ISA
We have identified the following four capabilities to control timing that would be desirable at the ISA level:
C1 Execute a block of code taking at least a specified time [7].
C2 Execute a block of code. Conditionally branch if the execution of the block exceeded a specified amount of time
(the deadline).
C3 Execute a block of code. If, during the execution of the
block, a specified amount of time is exceeded, branch immediately to an exception handler.
C4 Execute a block of code in at most a specified amount of
time (the deadline).
Capabilities C1, C2, and C3 can be added to a given ISA
relatively easily. They can be used to ensure that a block
takes at least a certain amount of time, and to act upon
deadline misses, either immediately, in case of C3, or after
finishing the execution of a block of code (C2).
Capability C4, on the other hand, is more challenging, but
also more intriguing, as it requires to bound the execution
times of blocks of code.
6.2
ISA Extensions
In order to implement these four capabilities, we propose
the following ISA extensions. Here we assume that time
is measured in thread cycles, where one thread cycle corresponds to the minimum amount of time between instruction issues for a thread. Most instructions execute in one
thread cycle, but some may take multiple cycles to execute.
The PRET principle requires that it be possible to determine from the assembly code how many cycles elapse during
the execution of a sequence of instructions. Below, “current
time” is the thread cycle count when the instruction starts.
• set time %r, offset: load current time + offset into
register %r.
• delay until %r: ensure that the following instruction
executes at time [%r]2 , if possible, and otherwise at the
earliest possible time.
• branch expired %r, target: branch to target if current
time is greater than [%r].
• expection on expire %r, id : arm processor to throw
exception id when current time equals [%r] + 1.
• deactivate exception id : disarm the processor for exception id.
• mtfd %r: ensure that current time is less than or equal
to [%r] whenever this instruction is executed.
Capability C1 above, for example, can be implemented using
set time and delay until. Capability C3 requires set time,
exception on expire, and deactivate exception.
The most interesting of the above instructions is mtfd,
the name of which stands for “meet the final deadline.” It
implements capability C4. How can such an instruction be
realized? If the code between a set time instruction and an
mtfd instruction is defined in a Turing-complete programming language (which includes all widely used programming
languages), then the amount of time it takes to execute that
2
Here, [%r] denotes the value of register %r.
�code is undecidable. The mtfd instruction requires that
some static analysis technique be able to assure that the
execution time is bounded. This can be implemented, for
example, by having a compiler include execution-time analysis of the body of code along all paths between set time
and mtfd, and generate from this analysis a specification of
hardware requirements that ensure that the deadline is met.
For example, it could generate a bound on the number of
cycles required by the particular ISA instructions that the
compiler uses along the paths. Although no such compiler
will be able to generate such a specification for all programs
and all architectures (this would solve an undecidable problem), it is certainly possible to generate one for some programs and restricted classes of architectures. The generated
specification could be included in the object file produced by
the compiler, and a linker/loader could check the specification against the capabilities of the hardware being targeted.
It could then reject the program if the target hardware does
not have adequate capability.
Use of mtfd should be limited to situations where timing
control is strictly required (for example, in safety-critical
systems), because the above strategy will always result in a
tool chain that will reject some valid programs.
7. APPLICATIONS
Many potential benefits stem from an ability to achieve
precise timing while executing concurrently. In this section,
we give a few simple examples that take advantage of such
precise timing.
7.1
Mutual Exclusion
To illustrate how the ISA extensions above can be used
for synchronization, we present a simple producer/consumer
example. This example has been adapted from an earlier
version in [10].
In our example, the producer and the consumer communicate through a shared buffer. A general approach to
managing a shared buffer across separate threads is to have
mutually-exclusive critical sections that only a single thread
can access at a time.
We synchronize the producer and the consumer using the
ISA extensions described above, avoiding the common solution to mutual exclusion: locks. In our approach, the time
that a thread waits to access the resource does not depend
on the behavior of the other threads accessing the resource.
The threads are temporally isolated.
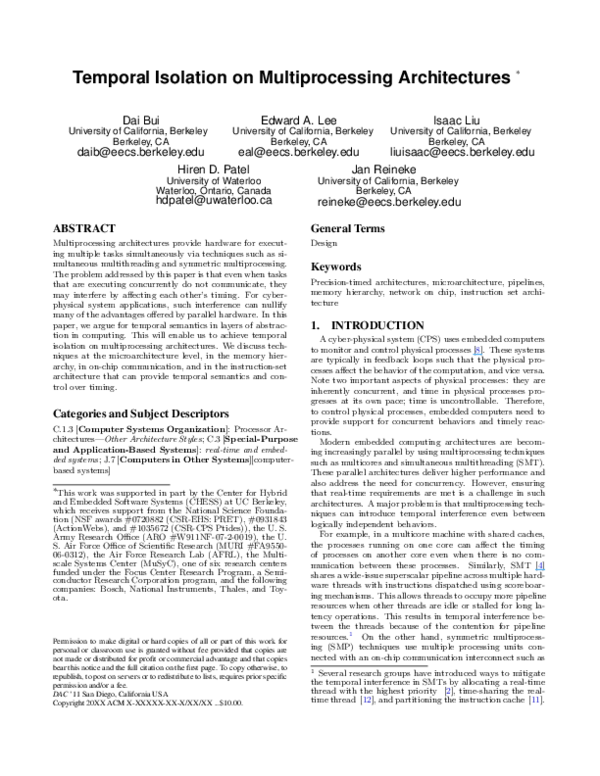
Figure 1 gives pseudo-code for the producer and the consumer accessing the shared variable buf. The producer iterates and writes an integer value to the shared data. The
consumer reads this value from this shared data and stores
it in an array. For simplicity, our consumer does not perform
any other operations on the consumed data. It just stores
the data in the array.
The ISA extensions in Figure 1 are interleaved with the
C-like code and marked in color and italics. We use staggered deadlines at the beginning of each thread to offset the
threads and force the producer to start before the consumer
(our architecture enables simultaneous starting of threads).
Inside each thread, deadlines force each loop to run in lockstep, each thread progressing at the same rate. The relative
timing of the threads is constant, so that the consumer reads
data only after the producer has written it.
We assume here that the shared buffer is located in the
scratchpad memory. This guarantees that accesses to the
buffer will take a single thread cycle and will be atomic, so
we only need to ensure that the nth write occurs before the
nth read. For some programs (not this one), we may also
need to ensure that the nth read occurs before the (n + 1)th
write. We leave this as an exercise.
The offsets to achieve this are given by deadlines at the
beginning of the program. The deadline of 31 thread cycles
on line 2 of the consumer is computed from the assembly
language instructions and is the smallest deadline that the
consumer thread can meet. The offset of the producer loop
is 30 thread cycles. This ensures that the consumer reads
after the producer writes, independently of which hardware
threads the producer and consumer are running in.
Once inside the loop, deadlines force each thread to run at
the same rate, maintaining the memory access schedule. We
choose the smallest possible period that both the producer
and consumer can make. Analysis of the assembly language
instructions reveals that a loop iteration of the consumer
takes 9 thread cycles, whereas an iteration of the producer
takes less time.
7.2
Message-dependent Deadlock Avoidance
Careful control of timing can also help make a multiprocessing system free of deadlocks. Consider a program that
transmits packets repeatedly, where the time between packet
transmissions is data dependent. If messages are sent faster
than the recipient can handle, buffers along the path may
fill. This can result in message-dependent deadlock (MDD)
[16]. The problem can be avoided by enforcing a minimum
amount of time between message sends, something easily
implemented with delay until [3], and enforcing a maximum
amount of time between recipient reads, something we can
do with mtfd. This relies on controlled latency in the network (see Section 5).
While it is clear that such controlled timing can, in principle, prevent MDD, in practice, doing this well may be challenging. Consider for example a message source that, using
delay until, is constrained to transmit message with a time
gap of at least τ seconds. Suppose that on the path to the
recipient there is a buffer that can hold N messages. Then
the recipient must be constrained, using mtfd, to receive at
least M −N +1 messages in every time window of length M τ ,
for any natural number M . There are simple schemes that
guarantee this property [3]. For example, we can use mtfd
to ensure that the recipient reads a message at least every
τ seconds. But this is over-constraining. Looser constraints
on the receiving problem are undoubtedly possible.
8. CONCLUSIONS
Temporal isolation can be achieved today at coarse granularity, but precise control has gotten increasingly more difficult due to clever techniques at the lower layers, the microarchitecture, the memory system, and the NoC. The fact
that today’s ISAs have no temporal semantics makes these
clever techniques perfectly valid, but for applications that
require precise or controllable timing, the clever techniques
enormously complicate the system design task. A system designer does not know the temporal behavior until the system
is completely built and deployed on particular hardware, and
even then, the temporal behavior emerges in unpredictable
ways from minute details of the implementation.
This paper argues that by introducing temporal seman-
�1 void p r o d u c e r ( ) {
2
s e t t i m e R1 , 30
3
v o l a t i l e in t ∗ buf = ( in t ∗ ) ( 0 x3F800200 ) ;
4
unsigned in t i = 0 ;
5
while ( true ) {
6
d e l a y u n t i l R1
7
mtfd R1
8
∗ buf = i ;
9
a d d i R1 , R1 , 9
10
i ++;
11
}
12 }
Listing 1: Producer
1 in t consumer ( ) {
2
s e t t i m e R1 , 31
3
v o l a t i l e in t ∗ buf = ( in t ∗ ) ( 0 x3F800200 ) ;
4
unsigned in t i = 0 , a r r [ 8 ] ;
5
f o r ( i = 0 ; i < 8 ; i ++)
6
arr [ i ] = 0;
7
while ( true ) {
8
d e l a y u n t i l R1
9
mtfd R1
10
in t tmp = ∗ buf ;
11
a r r [ i mod 8 ] = tmp ;
12
i ++;
13
a d d i R1 , R1 , 9
14
}
15 }
Listing 2: Consumer
Figure 1: Producer/Consumer Example: Using ISA extensions for synchronization.
tics at the lower layers, we can ensure that the behavior
of deployed parallel and concurrent systems matches their
specifications and their behavior during testing. More importantly, since temporal behavior can be isolated, timesensitive services become composable even when they share
resources.
9. REFERENCES
[1] B. Akesson et al. Composability and predictability for
independent application development, verification, and
execution. In M. Hübner and J. Becker, editors,
Multiprocessor System-on-Chip — Hardware Design
and Tool Integration. Springer, 2010.
[2] J. Barre, C. Rochange, and P. Sainrat. A predictable
simultaneous multithreading scheme for hard
real-time. In Proc. of ARCS, volume LNCS 4934,
pages 161–172. Springer, 2008.
doi:10.1007/978-3-540-78153-0_13.
[3] D. Bui, H. Patel, and E. Lee. Deploying hard real-time
control software on chip-multiprocessors. In Proc. of
RTCSA, pages 283–292, 2010.
doi:10.1109/RTCSA.2010.43.
[4] S. J. Eggers, J. S. Emer, H. M. Levy, J. L. Lo, R. L.
Stamm, and D. M. Tullsen. Simultaneous
multithreading: A platform for next-generation
processors. IEEE Micro, 17:12–19, 1997.
[5] A. El-Haj-Mahmoud, A. S. AL-Zawawi,
A. Anantaraman, and E. Rotenberg. Virtual
multiprocessor: an analyzable, high-performance
architecture for real-time computing. In Proc. of
CASES, pages 213–224, New York, NY, USA, 2005.
ACM. doi:10.1145/1086297.1086326.
[6] K. Goossens et al. Guaranteeing the quality of services
in networks on chip. In Networks on chip, pages
61–82, Hingham, MA, USA, 2003. Kluwer.
[7] N. J. H. Ip and S. A. Edwards. A processor extension
for cycle-accurate real-time software. In Proc. of the
IFIP International Conference on Embedded and
Ubiquitous Computing (EUC), pages 449–458, Seoul,
Korea, 2006. doi:10.1007/11802167_46.
[8] E. A. Lee. Cyber physical systems: Design challenges.
In Proceedings of ISORC, pages 363 – 369, Orlando,
Florida, 2008. IEEE. doi:10.1109/ISORC.2008.25.
[9] E. A. Lee. Computing needs time. CACM,
52(5):70–79, 2009. doi:10.1145/1506409.1506426.
[10] B. Lickly et al. Predictable programming on a
precision timed architecture. In Proc. of CASES,
pages 137–146, USA, 2008. ACM.
doi:10.1145/1450095.1450117.
[11] S. Metzlaff, S. Uhrig, J. Mische, and T. Ungerer.
Predictable dynamic instruction scratchpad for
simultaneous multithreaded processors. In Proc. of
MEDEA, pages 38–45, New York, NY, USA, 2008.
ACM. doi:10.1145/1509084.1509090.
[12] J. Mische, S. Uhrig, F. Kluge, and T. Ungerer.
Exploiting spare resources of in-order SMT processors
executing hard real-time threads. In ICCD, pages
371–376, 2008. doi:10.1109/ICCD.2008.4751887.
[13] C. Pitter and M. Schoeberl. A real-time java
chip-multiprocessor. ACM TECS, 10(1):9:1–34, 2010.
doi:10.1145/1814539.1814548.
[14] J. Rosen, A. Andrei, P. Eles, and Z. Peng. Bus access
optimization for predictable implementation of
real-time applications on multiprocessor
systems-on-chip. In Proc. of RTSS, pages 49–60.
IEEE, 2007. doi:10.1109/RTSS.2007.13.
[15] Z. Shi and A. Burns. Real-time communication
analysis for on-chip networks with wormhole
switching. In Proc. of NOCS, pages 161–170. IEEE,
2008. doi:10.1109/NOCS.2008.4492735.
[16] Y. H. Song and T. M. Pinkston. On
message-dependent deadlocks in
multiprocessor/multicomputer systems. In HiPC,
pages 345–354, London, UK, 2000. Springer-Verlag.
[17] T. Ungerer et al. Merasa: Multicore execution of hard
real-time applications supporting analyzability. IEEE
Micro, 30(5):66 –75, Sept.-Oct. 2010.
doi:10.1109/MM.2010.78.
[18] R. Wilhelm, D. Grund, J. Reineke, M. Schlickling,
M. Pister, and C. Ferdinand. Memory hierarchies,
pipelines, and buses for future architectures in
time-critical embedded systems. IEEE TCAD, 28(7),
2009. doi:10.1109/TCAD.2009.2013287.
�
 Isaac Liu
Isaac Liu