A SMART LAYER FOR REMOTE LABORATORIES
A SMART LAYER FOR REMOTE LABORATORIES
Ricardo J. Costa 1, Gustavo R. Alves1 and Domingos S. Santos2
1
LABORIS / Polytechnic Institute of Porto - School of Engineering (ISEP), Porto, Portugal
2 Polytechnic Institute of Porto - School of Engineering (ISEP), Porto, Portugal
Abstract - Commonly, when a weblab is developed to
support remote experiments in sciences and engineering
courses, a particular hardware/software architecture is
implemented. However, the existence of several
technological solutions to implement those architectures
difficults the emergence of a standard, both at hardware
and software levels. While particular solutions are adopted
assuming that only qualified people may implement a
weblab, the control of the physical space and the power
consumption are often forgotten. Since controlling these two
previous aspects may increase the quality of the weblab
hosting the remote experiments, this paper proposes the use
of a new layer implemented by a domotic system bus with
several devices (e.g. lights, power sockets, temperature
sensors, and others) able to be controlled through the
Internet. We also provide a brief proof-of-concept in the
form of a weblab equipped with a simple domotic system
usually implemented in smart houses. The added value to
the remote experiment hosted at the weblab is also identified
in terms of power savings and environment conditions.
Index Terms—Remote Experimentation, Weblab, Domotic
System, KNX.
I.
INTRODUCTION
Weblabs are used for educational purposes since the
mid 90’s. According to Aktan et al. [1], it was maybe in
1996 the first time an undergraduate weblab has been
made fully accessible using networking tools. This
solution contributed to the appearance of the Remote
Experimentation concept, defined as a distance learning
area that enables the remote control of real experiments
using computers connected to the Internet. This remote
access to labs, commonly used to support the practical
work required in sciences and engineering courses,
brought several advantages to education, like: a) users
(teachers and students) may access resources not available
locally, providing the accomplishment of experiments
without any costs; b) experiments may be shared among
institutions; c) equipment may be used more often; d)
costs per student may be reduced; among others [2].
Due to all those advantages, already described in
literature, nowadays there is a growing number of
weblabs. Since those same labs require specific resources
to enable a remote access, several solutions for
harmonizing the software and hardware used for
implementing them have already been proposed and
described. However, the existence of many different
technologies difficults the choice for a standard approach
to implement a specific weblab both in terms of hardware
and software. Usually, when a specific weblab is required,
an immediate and particular technical solution is adopted
for this development. Moreover, due to the specificity of
each solution, usually only qualified people are able to
develop one, which partially justifies that almost all
weblabs fall into the engineering domain [3]. Thus,
harmonization at hardware and software levels is an
important aspect to take into consideration as to facilitate
the construction of standard and well defined weblabs. If
harmonization is followed, software/hardware modules
used in each weblab may be reused on others. This will
ease the creation of weblabs and promote its widespread
use in the teaching and learning domain. Moreover, by
following a standard architecture, other aspects may be
considered during a weblab implementation, namely the
environment of the physical space occupied by it and the
power infrastructure. By controlling these two common
aspects to all weblabs, further control facilities are given
to remote users. They will be able to control the place
where a specific experiment is running, like if they were
in the place, contributing to approach the in-place lab
facilities to weblabs. To implement these aspects in any
weblab, we propose the adoption of a standard domotic
system bus usually implemented in smart houses, which
will ease the control of all the environment aspects
encountered in any lab.
The rest of this paper is organized as follows: in the
next section we discuss those same weblab requirements,
namely issues concerning the control of the physical space
(light incidence and temperature) and the power sockets
where the lab devices are connected to; section 3 presents
the use of a domotic system bus within a client-server
architecture; and section 4 describes the solution adopted
for our lab that enables remotely controlling two specific
devices (a halogen lamp and a power socket). The paper
ends with some considerations about the work already
done and future directions.
II. ANALYSIS OF REQUIREMENTS
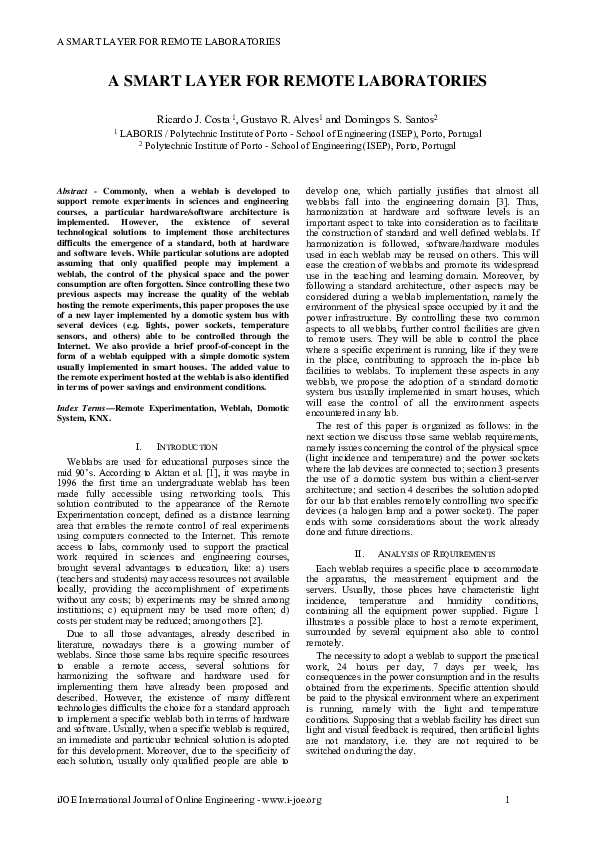
Each weblab requires a specific place to accommodate
the apparatus, the measurement equipment and the
servers. Usually, those places have characteristic light
incidence, temperature and humidity conditions,
containing all the equipment power supplied. Figure 1
illustrates a possible place to host a remote experiment,
surrounded by several equipment also able to control
remotely.
The necessity to adopt a weblab to support the practical
work, 24 hours per day, 7 days per week, has
consequences in the power consumption and in the results
obtained from the experiments. Specific attention should
be paid to the physical environment where an experiment
is running, namely with the light and temperature
conditions. Supposing that a weblab facility has direct sun
light and visual feedback is required, then artificial lights
are not mandatory, i.e. they are not required to be
switched on during the day.
iJOE International Journal of Online Engineering - www.i-joe.org
1
�A SMART LAYER FOR REMOTE LABORATORIES
Figure 1. Physical space associated to a weblab.
Eventually, controlling the blinds can provide better
light conditions depending on the part of the day and of
the present season. During the night and when not in use,
the lights at the weblab may also be switched off in order
to save energy. Besides, depending on the type of
prototype and equipment used in the remote experiment,
the ability to control/monitor the temperature may be
required. For that purpose, two solutions may be
considered: the temperature control can be made
automatically within the weblab, or users may be provided
with the ability to control it remotely. In the first solution,
an air-conditioning system, inside the weblab, controls the
temperature and continuously guarantees that prespecified conditions are satisfied for a correct lab
operation. Alternatively, the temperature can be monitored
by a sensor and, based on the readings, users may change
it for a specific value, by remotely controlling fans,
heaters or even specifying a new temperature value for the
air-conditioning system. Although not being a common
request in a remote experiment, same weblabs may require
a precise temperature control. This is the case with
experiments that use specific materials that change their
properties according to temperature. Another situation,
where temperature control may be required, is in some
environments where the measurement devices require a
given temperature in order to work properly. In both
situations, remote users should have specific information
about the equipment, so as to adjust the present
temperature conditions to the required ones.
An additional requirement that should be considered is
the ability to switch off each device of the weblab, when
not in use. If possible of being done remotely, the all lab
may be switched off when a specific experiment ends.
Latter, when another experiment is starting, the remote
user may turn it on. This will contribute to a reduction of
the power consumption and hence of the energy costs.
Additionally, it may also be desirable to reinitialize a
certain device by applying an off/on sequence. These
suggestions/requirements depend on whether the device
and apparatus to be switched off/on requires a setup
procedure or not. Considering a PC, for instance, it is not
possible to switch it off by just pulling out the plug from
the power socket, i.e. by simply switching it off. If in
some devices turning off the power will take them into a
default state, on others we have to follow a specific
sequence for that purpose. This is usually the case with the
apparatus, which sometimes requires a software
initialization made by an Instrumentation Server. In this
situation, if we intend to setup the entire weblab by
resetting it, first we have to reset the Instrumentation
Server and then the apparatus, so it can be reinitialized by
using control signals coming from the Instrumentation
Server. Again, specific attention is required in the way the
Instrumentation Server is reset, since it can not be turned
off abruptly because it could damage the software
installed on it. Preferably, the server should be reset by an
UPS (Uninterrupted Power Supply) using a soft reset that
allows turning off the server by software. If all these setup
and reinitialization considerations are supported through
remote control, then the technical support, usually made
by a technician, may be reduced or even suppressed,
which also contributes to reduce the weblab maintenance
costs. Moreover, switching off all devices and the
apparatus, when not in use, reduces the ageing effects,
which also contributes to the quality of the results
obtained from the remote experiments.
To address all the previous points, we propose using a
specific architecture with a standard domotic system bus,
usually implemented in smart houses. The advantage of
using a standard solution is that all institutions currently
supporting weblabs may quickly adopt it with small
development efforts.
III. PROPOSED ARCHITECTURE
Commonly, weblabs are idealized for specific
experiments. Several literature have been proposing
architectures regarding the control of weblabs. However,
from our knowledge, few have considered the ability to
remotely control the physical space as well as the power
sockets where the lab devices connect to. At this point two
situations are common: 1) this requirement is not even
considered; 2) in-house specific solutions are used to
tackle the problem. To address both situations we propose
weblab designers to considerate the possibility of using a
standard domotic system bus, in the way illustrated in
figure 2.
This proposed architecture contains two servers: the
Instrumentation Server and the Web Server, both
connected through an Intranet. All devices available in the
weblab, namely the experiment apparatus, Webcams, and
the measurement equipment are controlled by the
Instrumentation Server. In order to facilitate the
development of a weblab, all devices have to be
autonomous, i.e. they should be able to work in an
independent way, which means that all the hard
processing tasks should be made inside each one. The
Instrumentation Server only sends/receives basic signals
to control and monitor each device. At the same time, the
Instrumentation Server transfers information to/from the
Web Server enabling the interface between remote users
and the lab. Another relevant aspect presented in the
proposed architecture is the UPS. This unit is connected to
the Instrumentation Server via a serial RS232 connection,
and to a power socket controlled by the domotic system
bus. By turning off this power socket, the UPS will send a
signal to the Instrumentation Server, instructing him to
initiate a software shut down sequence. This avoids the
application under execution in the Instrumentation Server,
from being damaged because of a sudden power failure
(i.e. an off command) or an improper shut down sequence.
iJOE International Journal of Online Engineering - www.i-joe.org
2
�A SMART LAYER FOR REMOTE LABORATORIES
Figure 2. Suggested architecture to control the temperature and light conditions plus the power infrastructure
(power sockets) of the weblab physical space.
Users must establish a Web connection to the Web
Server so they can download the web interfaces designed
for a specific device (PC, PDA, Smart Phone or Mobile
phone), to control the weblab. The Web Server should
also contain the relevant pedagogical contents, as weblabs
experiments are mainly used for transferring knowledge
and for practicing theoretical concepts [3]. This means
that a database is required together with a Virtual
Learning Environment both intending to keep e-learning
course contents (e.g. documents and images) together with
specific tools for course management, like assessment
tools and others. Moreover, since usually only one
experiment is available in a specific weblab, the Web
Server should also have an access management system,
required to handle simultaneous accesses [4].
Additionally, the Web Server should also control the
domotic system bus. For this purpose, it must be coupled
to the domotic system bus so that a software layer
installed in it may enable remotely controlling all lab
devices. This facility should be made by the Web Server
because it is the only device required to be permanently
turned on, to allow the weblab availability 7 days per
week, 24 hours per day. Thus, by adopting this
architecture it is possible to remotely turn on/off the entire
weblab and control the physical space.
Specific domotic devices named actuators are directly
connected to lamps, temperature sensors, and other
devices, and are characterized by having a dedicated
processor that enables doing specific control tasks
required for each of those devices, like: increasing lights
intensity, open/close blinds, controlling the temperature
and so on. Besides controlling each device, the processor
within the actuator has also the ability to understand a
communication protocol, specific of the domotic bus.
Adopting this solution, the Web Server will be free from
the hard processing tasks. This will facilitate the adoption
of this architecture for all weblabs, because it is not
necessary to develop the hardware, and the software will
be much easier to build. Besides, if we adopt a
commercial domotic system, which guaranties a well
tested solution, user’s confidence to use the weblab will
increase. Based on the presented architecture, we have
implemented a solution at our lab which specifically
enables remotely controlling a halogen lamp and the
power supply that powers the experiment apparatus.
IV. IMPLEMENTED LAYER
The technology used to implement the architecture
illustrated in the previous section was the KNX standard
domotic system, usually found in smart houses [6]. In the
Web Server we installed a software layer to control the
KNX system. Instead of implementing the KNX protocol
from the scratch, we developed the software layer using a
JAVA API named CALIMERO developed by the Vienna
University of Technology, Automation Systems Group
[5]. This API provides a set of methods to control the
KNX bus communications and all the connected devices.
The next sub sections present all the development aspects
of both hardware and software levels implemented at our
lab, together with a brief introduction to the KNX
standard domotic system.
A.
Physical devices and their configuration
Detailing on the choice of the KNX system, it is both a
European Std. (CENELEC/EN 50090 and CEN/EN
13321-1) and a world Std. (ISO/IEC 14543-3), it is
platform independent, guaranties interoperability of
products from different manufacturers and stands for high
product quality guaranteed by the KNX Association [6].
The KNX/EIB denomination is often used in literature
iJOE International Journal of Online Engineering - www.i-joe.org
3
�A SMART LAYER FOR REMOTE LABORATORIES
because the KNX standard is based in the communication
stack of the EIB specification. Besides, it also integrates
new configuration mechanisms and communication media
originally developed by other domotic specifications,
namely Batibus and EHS. Figure 3 presents the set of
KNX devices used in our lab that, locally and remotely,
allows to: 1) turn on/off and adjust the brightness of a
halogen lamp; 2) switch on/off a power socket. Figure 4
contains some photos of those devices.
Figure 5. Push button used to locally control the devices connected to
the domotic system bus.
TABLE I.
DOMOTIC DEVICES USED IN THE WEBLAB.
Manufacturer
Functionality
Price (€)
(May 07)
Tronic dim
actuator 1gang
215W built-in
(75331002)
Berker
Controls the
brightness of the
halogen lamp and
allows turning it
on/off
310.80
Switch actuator
2gang 10A
built-in
(75332001)
Berker
Turns on/off the
power socket
271.43
IP/EIB router
(AP 146
/5WG1 1463_B01)
Siemens
Converts IP to EIB
frames and
interconnects the
KNX bus to an
Intranet/Internet
769.23
Power supply
(5WG1 1221AB01)
Siemens
Supplies the KNX
domotic system bus
314.63
ABB
Allows controlling
locally the halogen
lamp and the power
socket
182.00
Device
Figure 3. Domotic system implemented in the weblab.
Push button
(6323 3f-tritonswitch sensor)
Figure 4. Pictures of the KNX domotic system used in the weblab.
Besides the power supply required for the KNX bus,
this topology contains two device types: two actuators
(dimming and switching actuators) and a 3 gang push
button (control touch sensor). The actuators are directly
connected to the elements that will be remotely/locally
controlled (the halogen lamp and the power socket) using
the push button. By using each button of this sensor, users
may locally turn on/off the power socket, and the halogen
lamp and control its brightness, as illustrated in figure 5.
We connect the KNX bus to the Web Server using an
IP/EIB router. This router converts all the IP frames, sent
by the Web Server, to EIB frames, to control and monitor
each element. Table 1 specifies the actual devices used in
our lab, the manufacturer, their functions, and the actual
market price (relative to May 2007). Notice that others
may be chosen, with the same implemented functionalities
and eventually with lower prices.
∑=
1848.09
All the devices available in the domotic system bus
were previously configured by a software package named
ETS [7]. With this software installed in a common PC
with the Windows XP OS, we: a) defined an address for
each KNX device so they can be recognized in the bus; b)
specified the operation of each device, configuring its
parameters (e.g. specified that a simple touch in one
button of the sensor will turn on/off the lamp); and c)
implemented a logic connection between the devices to
allow their communication.
After configuring the bus and the devices, we had to
download that configuration to the system by connecting,
through a local network, the ETS to the KNX bus. This
transference required the use of the IP/EIB router using a
specific IP and port address. Figure 6 presents a
screenshot with the configurations made in the ETS
system to program each KNX device
iJOE International Journal of Online Engineering - www.i-joe.org
4
�A SMART LAYER FOR REMOTE LABORATORIES
server is required. With this solution, instead of having
two open Web accesses, one to control the domotic
system bus and the other to control the experiment, we
only need one to control both. All commands received in
the Web Server, used to control the experiments, are
redirected to the application installed in the
Instrumentation Server. The disadvantage of this second
solution is the requirement to develop two distinct
applications to control the lab. However, we will only
need one open Web connection, which promotes higher
security.
Figure 6. Configuration of the domotic system using the ETS
software.
B.
Remote control
There are in the market some IP gateways that allow
controlling the KNX system through the Internet.
However, all have in common rigid Web interfaces which
are not able to change. This means that if we want to build
a specific interface, we have to face with several buttons
eventually not required for a specific experiment. Besides,
using a gateway will be expensive (its price rounds 1000
€). Then, if we use the required Web Server to remotely
control the KNX bus, the solution will be cheaper and will
facilitate the construction of appropriated Web interfaces
for each remote experiment.
Thus, we developed a new software layer to control the
lamp and the power socket available in the weblab.
Besides controlling the KNX system, the architecture is
modular and may be used by any experiment, since it
works together with any existing weblab. Figure 7
presents the software modules implemented at our lab,
where a particular attention should be paid to the Web
Server and to the domotic bus connections.
The architecture uses two servers with specific
software, both following a client-server approach.
Since the Instrumentation Server is attached to the
weblab apparatus, it should have a software application to
control the lab. However, if we want to remotely control
the lab, the Instrumentation Server must also have an
HTTP (HyperText Transfer Protocol) server installed, so
users may download specific Web interfaces. However, an
HTTP server is not always required to be installed in the
Instrumentation Server. It may have a resident application
communicating with another application running in the
Web Server. In this situation, all the Web interfaces will
be accessed through the Web Server where an HTTP
Power
Power
Supply
Supply
The presented solution contains the usual steps made
when a simple KNX system is configured to be used
locally. For the remote control, another software layer was
specified to control all KNX devices (as locally done
through the push button).
Figure 7. Implemented software architecture to control the KNX/EIB
devices.
We developed a client-server application for the Web
Server that enables remotely controlling the KNX domotic
system bus. As previously said, this application is required
to be in the Web Server because it controls the power
socket of the UPS connected to the Instrumentation
Server, i.e. if the software application was installed in the
Instrumentation Server the user would not be able to turn
it on/off neither to reset it. To avoid developing all the
logic behind the KNX/EIB protocol, we used the JAVA
API Calimero integrated in a JAVA server application
(Servlet). However, to use the Calimero API, an IP/EIB
router was required to transmit information from the
Servlet application to the KNX/EIB bus. All details
behind the KNX protocol are hidden in this API together
with the router, facilitating development tasks. Besides,
we didn’t need to place the router near the Web Server,
since all data control generated by the Servlet are
transported through an IP network. The only requirement
during the development was the use of the specific port
3671 to access the IP/EIB router. In other words, we can
not use a firewall that blocks port 3671 between the router
and the Web Server, in particular with the Servlet
application. Since this application was developed using
JAVA software and as it follows a client-server
architecture, the Web Server runs an HTTP server named
TomCat [8] to understand and process user’s requests
together with the Java Servlet Technology [9]. When a
specific user wants to access the lab, he/she makes an
HTTP access to the Web Server using a particular IP
address, and a Java Applet, illustrated in figure 8, will be
downloaded to his/her PC.
iJOE International Journal of Online Engineering - www.i-joe.org
5
�A SMART LAYER FOR REMOTE LABORATORIES
Any interface developed to control a specific
experiment may work together with this interface that
enables users to remotely control the domotic system bus.
To use this last interface, an user must establish a
connection to the KNX/EIB bus, by pressing the buttons
available in bottom-right corner (fig. 8). After connected
to the bus, a message notifying the users will appear at the
bottom of the interface, indicating a successful connection
or any problem that may have occurred. Assuming a
successful connection, remote users are able to control the
KNX devices (lamp and power socket) using the buttons
to turn them on/off and the slide bar to regulate the lamp
brightness. Since we adopted the HTTP as the
communication protocol between the Servlet application
installed in the Web Server and the Java Applet, any
change made locally may be actualized in the Applet by
making a refresh. This refresh procedure, which may be
done by simple reloading the Applet, is made
automatically every 30 seconds, updating the interface for
user’s monitorization.
Turns on/off
the lamp
Indicates if the action
was made remotely
Information about
actions made in the bus
Turns on/off the
power socket
Server application
(JAVA servlet)
(2)
Open/close the
KNX bus
connection
Figure 8. Web interface (Java Applet) used to control the KNX
domotic system bus.
All interactions made between users and the Web
Server are described in figure 9, illustrating the step
sequences from initially connecting to the Web Server
until finally controlling the KNX devices:
1. Using a Web browser, users access a Web page
located in the Web Server.
2. Within this page, a Web interface (an Applet) is
downloaded to the user’s PC.
3. Once the Web interface has been downloaded and
opened, users have the ability to control the lamp
brightness and the power socket of the weblab by
sending commands to the Servlet application.
4. The Servlet sends those commands to the IP/EIB
router, in order to control the devices.
5. For a local control, technicians may use the push
button that works independently of the server
application.
(1)
(3)
Calimero API
(4)
Intranet /
Internet
IP / EIB
router
KNX/EIB
(5)
Figure 9. Process sequence used to control, locally and remotely, the
KNX devices.
V.
Controls the lamp
brightness
Light Intensity Status=34%
Web Server
User
CONCLUSIONS AND FUTURE WORK
Educational requirements promoted the development of
several software tools to support the teaching and learning
processes. These tools, within PCs connected to the
Internet, facilitated the remote control of equipments
promoting the emergence of the Remote Experimentation
concept, which allows students/teachers to access real labs
in order to run experiments, almost in the same way as
they would do locally. This solution brought many
benefits to education providing versatility, since anyone
may access a real lab at anytime from everywhere, while
at the same time reducing the costs in education.
However, to provide a weblab it is necessary to
implement a hardware/software infrastructure. Usually,
these implementations do not follow a standard solution
(hardware and software) and the control of the physical
space, together with the power sockets, are often
forgotten. If these remote control facilities are
implemented in a weblab, the energy costs may be
reduced (the apparatus are able to be turned off when not
in use) and the quality of the experiments may also
increase, since all the physical space (light, temperature,
and others) may be controlled and monitored. To provide
all those facilities in a weblab, this paper proposed the use
of a standard domotic system named KNX. By adopting
this system, it will be easier to implement a uniform
weblab architecture and it will be straightforward to
implement additional control facilities to the remote users.
Based on all these advantages, this paper presented an
implementation of the KNX system bus in a weblab,
enabling to control through the Internet a halogen lamp
and a power socket using a JAVA Web interface (an
Applet) within a Web page accessible through a PC. By
developing specific Web interfaces, this same approach
may be adapted to other users’ devices, like PDAs,
SmartPhones or Mobile Phones, increasing the access
versatility, by enabling students/teachers to use recent
mobile devices. A log database, keeping all the actions
made in the KNX devices, may also be implemented in
the future, bringing benefits to the assessments, since it
will facilitate teachers to understand some of the actions
made by students in the weblab.
iJOE International Journal of Online Engineering - www.i-joe.org
6
�A SMART LAYER FOR REMOTE LABORATORIES
To conclude, we can say that this paper intended to be
an alert to the ability of controlling other aspects usually
forgotten in Remote Experimentation, namely the physical
environment and the power sockets used to supply a
weblab. Moreover, adopting a domotic system bus, like
the KNX Std., will promote the construction of a uniform
architecture using commercial domotic devices.
ACKNOWLEDGMENTS
This work was only possible with the collaboration of
Intelbus Lda. [10] that provided some of the KNX devices
used in the presented solution.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
B. Aktan, C. A. Bohus, L. A. Crowl and M. H. Shor, “Distance
Learning Applied to Control Engineering Laboratories,” IEEE
Transactions on education, vol.39, nº 3, 1996.
G. Alves, J. M. Ferreira, D. Müller, Heinz-H Erbe, N. Hine, J. B.
M. Alves, C. Pereira, L. Chiang, O. Herrera and E. Sucar,
“Remote Experimentation Network - Yielding an Inter-University
Peer-to-Peer e-Service,” 10th IEEE International Conference on
Emerging Technologies and Factory Automation (ETFA’05),
Catania, Italy, 19 - 22 Sept., 2005.
Jing Ma and Jeffrey Nickerson, “Hands-on, Simulated, and
Remote Laboratories: A comparative Literature Review,” ACM
Computing Surveys, vol. 38, nº 3, 2006.
J. M. Ferreira and A. Cardoso, “A Moodle extension to book
online labs,” International Journal of Online Engineering (iJOE),
vol. 1, nº. 2, 2005.
Calimero API – “EIBnet/IP is a client library that supports
tunneling connections to the KNX/EIB bus,” available at:
http://calimero.sourceforge.net/, 2007.
KNX – “Association that promotes the KNX standard for Home
and Building Control,” available at: http://www.konnex.org/,
2007.
[7]
ETS – “Tool Software design to configure intelligent home and
building control installations made with the KNX system,”
available at: http://www.konnex.org/knx-tools/ets/intro/, 2007.
[8] TOMCAT – “Apache Tomcat Web Server,” available at:
http://tomcat.apache.org/, 2007.
[9] Java Servlet Technology – “Java Servlet technology provides Web
developers a consistent mechanism for extending the functionality
of a Web server and for accessing existing business systems,”
available at: http://java.sun.com/products/servlet/, 2007.
[10] Intelbus Lda. – “Company that implements solutions in the
domotic area,” available at: http://www.intelbus.pt/, 2007.
AUTHORS
Ricardo J. Costa is an Assistant Professor at the
Department of Electrical Engineering of the Polytechnic
Institute of Porto - School of Engineering (ISEP). He is
also a member of the LABORIS/ISEP research lab, Rua
Dr. Bernardino de Almeida 431, 4200-072, Porto,
Portugal (mail:rjc@isep.ipp.pt).
Gustavo R. Alves is a Professor at the Department of
Electrical Engineering of the Polytechnic Institute of Porto
- School of Engineering (ISEP). He is also the responsible
for the LABORIS/ISEP research lab, Rua Dr. Bernardino
de Almeida 431, 4200-072, Porto, Portugal
(mail:gca@isep.ipp.pt).
Domingos S. Santos is an Assistant Professor at the
Department of Electrical Engineering of the Polytechnic
Institute of Porto - School of Engineering (ISEP), Rua Dr.
Bernardino de Almeida 431, 4200-072, Porto, Portugal
(mail:dss@isep.ipp.pt).´
Manuscript received on June 22, 2007.
iJOE International Journal of Online Engineering - www.i-joe.org
7
�
 Gustavo R Alves
Gustavo R Alves