SSP 276 Phaeton Proximity Control
SSP 276 Phaeton Proximity Control
Download as pdf or txt
At a glance
Powered by AI
The document discusses the Automatic Proximity Control (APC) system, which expands conventional cruise control to maintain a safe distance from the vehicle ahead in heavy traffic.
APC is an expansion of the conventional cruise control system (CCS) that adapts the vehicle's speed to the speed of any vehicle driving ahead if it is moving slower than the driver's set speed.
APC functions as a driver assistance system by maintaining a safe distance from the vehicle ahead through braking if necessary, allowing the driver to cruise comfortably in heavy traffic and relieving the driver on motorways.
You might also like
- Siemens Mechatronic Systems Certification Program: Test QuestionsDocument22 pagesSiemens Mechatronic Systems Certification Program: Test QuestionsIsaac Gisore100% (1)
- Ecg PDFDocument60 pagesEcg PDFRoberto Merizalde100% (4)
- Scania+Opticruise+transmission+troubleshooting PDFDocument84 pagesScania+Opticruise+transmission+troubleshooting PDFMikwile Julias KephaNo ratings yet
- Adaptive Cruise Control ReportDocument60 pagesAdaptive Cruise Control Reportapi-36231555175% (4)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Diagnostic Trouble List: Localización y Solución de ProblemasDocument5 pagesDiagnostic Trouble List: Localización y Solución de ProblemasRforceIbañezNo ratings yet
- Scania Diagnos & Programmer 3 2.28Document13 pagesScania Diagnos & Programmer 3 2.28scania100% (3)
- Scania Opticruise Transmission Fault Codes DTC & TroubleshootingDocument84 pagesScania Opticruise Transmission Fault Codes DTC & Troubleshootingfrank mutale100% (14)
- CNC Machining Handbook: Building, Programming, and ImplementationFrom EverandCNC Machining Handbook: Building, Programming, and ImplementationNo ratings yet
- SSP 296 1.4 & 1.6 FSi EngineDocument24 pagesSSP 296 1.4 & 1.6 FSi Engineภูเก็ต เป็นเกาะ100% (3)
- 4829 - 389 Park Assist VWDocument32 pages4829 - 389 Park Assist VWfic57No ratings yet
- Opticruise: Description of Operation and Work DescriptionDocument84 pagesOpticruise: Description of Operation and Work DescriptionMusharraf KhanNo ratings yet
- SSP 292Document46 pagesSSP 292Roberto VoiculescuNo ratings yet
- ScaniaDocument39 pagesScaniarowan100% (7)
- 6HP26 ZF Transmissions With MechatronicsDocument66 pages6HP26 ZF Transmissions With MechatronicsSalman Eid100% (1)
- SSP 296 1.4 & 1.6 FSi EngineDocument16 pagesSSP 296 1.4 & 1.6 FSi Engineaz3ki3lNo ratings yet
- Sheet2 SolvedDocument25 pagesSheet2 Solvedirshad224No ratings yet
- 24 ACC+WorkbookDocument13 pages24 ACC+Workbookabdull rehmanNo ratings yet
- 24 ACC WorkbookDocument13 pages24 ACC WorkbookAttila KovácsNo ratings yet
- Bendix ® Gen 4 TM and Gen 5 TMDocument48 pagesBendix ® Gen 4 TM and Gen 5 TMMarcialCastroLeonidasNo ratings yet
- Active Front SteeringDocument19 pagesActive Front SteeringENIC-AITCG100% (2)
- SSP 402 Dynamic Steering in The Audi A4 '08Document32 pagesSSP 402 Dynamic Steering in The Audi A4 '08francois.garcia31100% (2)
- Bendix PDFDocument44 pagesBendix PDFJohansenfc100% (1)
- SSP 396 Lane Change AssistDocument12 pagesSSP 396 Lane Change Assistnicolae_popescu_18No ratings yet
- Ecas WabcoDocument34 pagesEcas WabcoBom_Jovi_68183% (6)
- Design of Adaptive Cruise Control (Acc)Document2 pagesDesign of Adaptive Cruise Control (Acc)Sandhya ShyamasundarNo ratings yet
- F01 Cruise Control SystemsDocument45 pagesF01 Cruise Control SystemsPhan VănNo ratings yet
- Meritor ABS TrainingDocument108 pagesMeritor ABS Trainingford62b100% (3)
- 04d - E60-E61 UpdatesDocument27 pages04d - E60-E61 UpdatesTrương HàoNo ratings yet
- Isuzu Transmission AW30 40LE Model Workshop ManualDocument266 pagesIsuzu Transmission AW30 40LE Model Workshop ManualjuanNo ratings yet
- Bendix EC-60 ABS / ATC Controllers (Standard & Premium Models) Frame and Cab MountDocument44 pagesBendix EC-60 ABS / ATC Controllers (Standard & Premium Models) Frame and Cab Mountosvaldo131984No ratings yet
- SSP 289 - Adaptive Cruise Control in The Audi A8Document46 pagesSSP 289 - Adaptive Cruise Control in The Audi A8Romeo BelkoNo ratings yet
- Ga 16Document142 pagesGa 16Ericsson Via90% (10)
- Mid 150Document51 pagesMid 150Julio Jara AguileraNo ratings yet
- BMW Automatic Trans ServiceDocument3 pagesBMW Automatic Trans Serviceparticia100% (69)
- Maintenance: SectionDocument51 pagesMaintenance: Sectiontomallor101No ratings yet
- Adaptive Cruise Control Sys OverviewDocument7 pagesAdaptive Cruise Control Sys OverviewMuhammad FarhanNo ratings yet
- ABS User ManualDocument40 pagesABS User ManualAntonio NavarreteNo ratings yet
- Viewfile 8 C 75Document39 pagesViewfile 8 C 75Memo VelascoNo ratings yet
- Adaptive Cruise Control Sys OverviewDocument6 pagesAdaptive Cruise Control Sys OverviewJoshua MillerNo ratings yet
- Pruebas ABS C2777Document58 pagesPruebas ABS C2777Alirio VilchezNo ratings yet
- Digitax STDocument206 pagesDigitax STYenireé MedinaNo ratings yet
- Korando B5 A0Document215 pagesKorando B5 A0Alex Lopez SantanderNo ratings yet
- Crafter PDFDocument84 pagesCrafter PDFAnonymous J1sELDp7100% (1)
- SSP 289 Adaptive Cruise Control in The Audi A8Document46 pagesSSP 289 Adaptive Cruise Control in The Audi A8SDFGNo ratings yet
- Control System PDFDocument76 pagesControl System PDFWawan SatiawanNo ratings yet
- Techs em ReportDocument17 pagesTechs em ReportShiva NageswararaoNo ratings yet
- Implementation and Evaluation of A Mass Estimation AlgorithmDocument49 pagesImplementation and Evaluation of A Mass Estimation AlgorithmRitesh SharmaNo ratings yet
- Truck AbsDocument48 pagesTruck Absautomotriz100% (1)
- Adaptive Cruise Control Using Model Predictive ControllerDocument3 pagesAdaptive Cruise Control Using Model Predictive ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- En Acs880 Firmware GHVDocument596 pagesEn Acs880 Firmware GHValreyanzaNo ratings yet
- mm37 PDFDocument32 pagesmm37 PDFSaša OljačaNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Electronic Automotive Transmission Troubleshooter Nissan-Infinity VehiclesFrom EverandElectronic Automotive Transmission Troubleshooter Nissan-Infinity VehiclesNo ratings yet
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Stories from the Road 3: An Automotive Case Studies SeriesFrom EverandStories from the Road 3: An Automotive Case Studies SeriesNo ratings yet
- Stories from the Road 6: An Automotive Case Studies SeriesFrom EverandStories from the Road 6: An Automotive Case Studies SeriesNo ratings yet
- Bosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid DriveFrom EverandBosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid DriveRobert Bosch GmbHNo ratings yet
- SSP 269 d1 PDFDocument60 pagesSSP 269 d1 PDFAdrian BuzasNo ratings yet
- 4T65R Erratic Shift, 1 2 ShuddleDocument1 page4T65R Erratic Shift, 1 2 ShuddleAlitar HersongollsNo ratings yet
- Article 0001 Ravigneaux Planetary TransmissionDocument9 pagesArticle 0001 Ravigneaux Planetary Transmissionthisisjinesh100% (1)
- Atb1128 DodgeDocument6 pagesAtb1128 Dodgeภูเก็ต เป็นเกาะNo ratings yet
- SSP 297 TouaregDocument56 pagesSSP 297 Touaregภูเก็ต เป็นเกาะ100% (1)
- SSP 298 Touareg ElectricsDocument29 pagesSSP 298 Touareg Electricsภูเก็ต เป็นเกาะ100% (1)
- SSP 286 New Data Bus SystemsDocument26 pagesSSP 286 New Data Bus Systemsภูเก็ต เป็นเกาะ100% (1)
- SSP 299 6 SP Manual Gearbox 08DDocument44 pagesSSP 299 6 SP Manual Gearbox 08DvasilealexandruNo ratings yet
- SSP 277 Phaeton ChassisDocument60 pagesSSP 277 Phaeton Chassisภูเก็ต เป็นเกาะNo ratings yet
- SSP 286 New Data Bus SystemsDocument30 pagesSSP 286 New Data Bus Systemsภูเก็ต เป็นเกาะNo ratings yet
- SSP 281 New Beetle CabrioletDocument40 pagesSSP 281 New Beetle Cabrioletภูเก็ต เป็นเกาะNo ratings yet
- SSP 275 Phaeton Air SuspensionDocument17 pagesSSP 275 Phaeton Air Suspensionภูเก็ต เป็นเกาะNo ratings yet
- SSP 280 Phaeton Auxillary HeaterDocument25 pagesSSP 280 Phaeton Auxillary HeaterButnaru EmanuelNo ratings yet
- SSP 269 d1 PDFDocument60 pagesSSP 269 d1 PDFAdrian BuzasNo ratings yet
- SSP 274 Phaeton InfotainmentDocument40 pagesSSP 274 Phaeton Infotainmentภูเก็ต เป็นเกาะNo ratings yet
- SSP 279 2.0 FSiDocument44 pagesSSP 279 2.0 FSiภูเก็ต เป็นเกาะ0% (1)
- SSP 271 Phaeton Heating & ACDocument76 pagesSSP 271 Phaeton Heating & ACภูเก็ต เป็นเกาะNo ratings yet
- SSP 273 Phaeton ConvenienceDocument29 pagesSSP 273 Phaeton Convenienceภูเก็ต เป็นเกาะNo ratings yet
- SSP 275 Phaeton Air SuspensionDocument21 pagesSSP 275 Phaeton Air Suspensionภูเก็ต เป็นเกาะ100% (1)
- SSP 272 Phaeton ObpsDocument27 pagesSSP 272 Phaeton Obpsภูเก็ต เป็นเกาะNo ratings yet
- SSP 273 Phaeton ConvenienceDocument23 pagesSSP 273 Phaeton ConvenienceButnaru EmanuelNo ratings yet
- SSP 265 Vehicle Electrics in Polo MY 02Document24 pagesSSP 265 Vehicle Electrics in Polo MY 02ภูเก็ต เป็นเกาะNo ratings yet
- SSP 264 Brake AssistDocument16 pagesSSP 264 Brake Assistภูเก็ต เป็นเกาะ100% (1)
- SSP 265 Vehicle Electrics in Polo MY 02Document24 pagesSSP 265 Vehicle Electrics in Polo MY 02ภูเก็ต เป็นเกาะ100% (1)
- SSP 264 Brake AssistDocument16 pagesSSP 264 Brake Assistภูเก็ต เป็นเกาะNo ratings yet
- Draw Magnetic Field Lines Around A Bar MagnetDocument6 pagesDraw Magnetic Field Lines Around A Bar MagnetsvsvsvsvNo ratings yet
- Mpispecquest - SNS - Asme VDocument3 pagesMpispecquest - SNS - Asme Vsaenal rapiNo ratings yet
- Coil Electronics ControlDocument28 pagesCoil Electronics ControlNippur de LagashNo ratings yet
- Transparencies Electrohydraulics Festo PDFDocument64 pagesTransparencies Electrohydraulics Festo PDFMoises CruzNo ratings yet
- Electronically Controlled Air Suspension (Ecas) For Buses: Maintenance ManualDocument32 pagesElectronically Controlled Air Suspension (Ecas) For Buses: Maintenance ManualWalterNo ratings yet
- E-OLSS: Electronic Control KomatsuDocument12 pagesE-OLSS: Electronic Control KomatsuJulio Meza100% (3)
- Mechatronics Lab Manual 2017 RegulationDocument49 pagesMechatronics Lab Manual 2017 Regulationusiaf007100% (1)
- Microcontroller Basede Automatc Vehicle Lock SysteDocument62 pagesMicrocontroller Basede Automatc Vehicle Lock SystejabezNo ratings yet
- BE-WI-248-01-F25 Datasheet Solenoid ValveDocument3 pagesBE-WI-248-01-F25 Datasheet Solenoid Valvemika cabelloNo ratings yet
- H Electro Hydraulic Controls YukenDocument142 pagesH Electro Hydraulic Controls Yukenchidambaram kasi100% (1)
- Actuator SpecsDocument2 pagesActuator SpecsMohammed MusthafaNo ratings yet
- Physics - Chapter 9 - Summary - G12 - ADV - 2022-2023Document23 pagesPhysics - Chapter 9 - Summary - G12 - ADV - 2022-2023Noor HaleemNo ratings yet
- Working of Woodward GovernorDocument42 pagesWorking of Woodward Governorsantosh sharmaNo ratings yet
- SymbolsDocument1 pageSymbolskwakwa4No ratings yet
- 4we6 Series 6xDocument12 pages4we6 Series 6xJas SumNo ratings yet
- 938G+ +Electrical+SystemDocument2 pages938G+ +Electrical+Systemhenotharenas100% (5)
- Festo Electrical Basic PDFDocument110 pagesFesto Electrical Basic PDFAlex ZXNo ratings yet
- Electromagnetic InductionDocument30 pagesElectromagnetic InductionAmitabh MahapatraNo ratings yet
- MELFA RH-6SH/12SH/18SH Series: Mitsubishi Electric Industrial RobotDocument6 pagesMELFA RH-6SH/12SH/18SH Series: Mitsubishi Electric Industrial RobotDavid GonzalezNo ratings yet
- ELECTRICO - Sis.controller 324DDocument2 pagesELECTRICO - Sis.controller 324DOswaldo AndradeNo ratings yet
- New Design - 140T Jamalpur CranesDocument101 pagesNew Design - 140T Jamalpur CranesmajjisatNo ratings yet
- Repair Guide For Denso Common Rail Injector RepairDocument22 pagesRepair Guide For Denso Common Rail Injector Repairrafael100% (1)
- JIS Valve StandardsDocument6 pagesJIS Valve StandardsUrip S. SetyadjiNo ratings yet
- Thinktop v50 and v70 Instruction ManualDocument29 pagesThinktop v50 and v70 Instruction ManualpretorianbrNo ratings yet
- Nasscontrols Key-Model-Catalog 062019 PDFDocument44 pagesNasscontrols Key-Model-Catalog 062019 PDFCeasar CapunoNo ratings yet
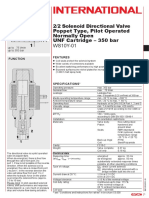
- 2/2 Solenoid Directional Valve Poppet Type, Pilot Operated Normally Open UNF Cartridge - 350 BarDocument2 pages2/2 Solenoid Directional Valve Poppet Type, Pilot Operated Normally Open UNF Cartridge - 350 BarOmkar TerkhedkarNo ratings yet
- 3512 ScematicDocument2 pages3512 Scematicmohamed hamedNo ratings yet