Pic 16F84
Pic 16F84
Download as doc, pdf, or txt
You might also like
- Hardware Rac 960 PX FeDocument65 pagesHardware Rac 960 PX FeАйбек Джумадиллаев100% (1)
- VHDL Implimentation of LZW Compression AlgorithmDocument3 pagesVHDL Implimentation of LZW Compression AlgorithmsetsindiaNo ratings yet
- RS232 or RS485Document26 pagesRS232 or RS485eathen999No ratings yet
- eMMC PDFDocument15 pageseMMC PDFteja C SNo ratings yet
- Ned User Manual Ned User ManualDocument185 pagesNed User Manual Ned User ManualMd. Ameer HamjaNo ratings yet
- Study of 8085 and Kit STS-85Document10 pagesStudy of 8085 and Kit STS-85Mohammed MansoorNo ratings yet
- Mikropascal ManualDocument349 pagesMikropascal ManualEnrique De Haro CortesNo ratings yet
- Question: Using Arm Assembly Language (Arm Cortex-M MicrocontrollDocument2 pagesQuestion: Using Arm Assembly Language (Arm Cortex-M MicrocontrollMustafa KhudhairNo ratings yet
- Thumb-2 Instruction SetDocument11 pagesThumb-2 Instruction SetSai Keerthana DNo ratings yet
- Gem5 Splash2Document13 pagesGem5 Splash2Apurv SahayNo ratings yet
- X 006 Reference To DIN VDE StandardsDocument1 pageX 006 Reference To DIN VDE StandardsSoni GunnersNo ratings yet
- Production DepartmentDocument37 pagesProduction DepartmentMeena Sivasubramanian100% (1)
- PSpice TutorialDocument5 pagesPSpice Tutorialchaitanya100% (1)
- ArduinoDocument22 pagesArduinosugadev74No ratings yet
- PIC16F877 Timer Modules Tutorials - Timer1Document4 pagesPIC16F877 Timer Modules Tutorials - Timer1RamKumar100% (1)
- STM32 Nucleo Boards User Manual - ST PDFDocument54 pagesSTM32 Nucleo Boards User Manual - ST PDFSebastian PeñaNo ratings yet
- FSM With DatapathDocument14 pagesFSM With DatapathQuoc Viet PhamNo ratings yet
- Lab 2 - Intel 8086 Microprocessor: Logical Instructions and Jump Commands in Assembly LanguageDocument10 pagesLab 2 - Intel 8086 Microprocessor: Logical Instructions and Jump Commands in Assembly LanguageKarthikeyan Madu MNo ratings yet
- mcb1700 LAB - Intro - ARM Cortex m3Document22 pagesmcb1700 LAB - Intro - ARM Cortex m3RagulANNo ratings yet
- Klu 8051Document165 pagesKlu 8051manvithbNo ratings yet
- Programmable Peripheral InterfaceDocument5 pagesProgrammable Peripheral InterfaceOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- XC8 MplabDocument72 pagesXC8 MplabAlex Castillon100% (1)
- FPGADocument14 pagesFPGASheikh Noor MohammadNo ratings yet
- LED Interfacing With PIC Microcontroller AimDocument25 pagesLED Interfacing With PIC Microcontroller AimsabNo ratings yet
- Chapter 12 - AVR Microcontrollers-Features, Architecture Assembly LanguageDocument131 pagesChapter 12 - AVR Microcontrollers-Features, Architecture Assembly LanguageErgin Özdikicioğlu100% (1)
- Experiment 4 Clippers and ClampersDocument26 pagesExperiment 4 Clippers and ClampersballDISCOVERIES PHballDISCOVERIESNo ratings yet
- DHT11 Arduino InterfacingDocument13 pagesDHT11 Arduino InterfacingfeteneNo ratings yet
- Dac 0800 & Dac 0802 (An 1525)Document4 pagesDac 0800 & Dac 0802 (An 1525)HARICH90No ratings yet
- Model Questions On RF & Microwave Engineering (Paper Code: EC601)Document12 pagesModel Questions On RF & Microwave Engineering (Paper Code: EC601)Dipan JanaNo ratings yet
- Simulink Support Package For ArduinoDocument4 pagesSimulink Support Package For ArduinofredNo ratings yet
- PIC16F877 and LDR Example Get MicrosDocument3 pagesPIC16F877 and LDR Example Get MicrosdevchandarNo ratings yet
- 2 - 8086 Memory ManagementDocument14 pages2 - 8086 Memory Managementhafsatamer03No ratings yet
- 09 1 BasicElectroStaticDocument14 pages09 1 BasicElectroStaticMeeraNo ratings yet
- VHDL Implemenation of Cordic AlgorithmDocument39 pagesVHDL Implemenation of Cordic Algorithm1234sharada50% (2)
- L9 Understanding Atmega328P 2Document15 pagesL9 Understanding Atmega328P 2VIGHNESH AIYANo ratings yet
- 8237 Dma ControllerDocument14 pages8237 Dma ControllerSAIF ULLAH100% (1)
- Programming PIC16F877ADocument2 pagesProgramming PIC16F877ADevi ChaitanyaNo ratings yet
- AN-1525 Single Supply Operation of The DAC0800 and DAC0802: Application ReportDocument6 pagesAN-1525 Single Supply Operation of The DAC0800 and DAC0802: Application ReportYasin ArslanNo ratings yet
- Computer Programming 1 - Jenny's OnlineDocument4 pagesComputer Programming 1 - Jenny's OnlineHiro GamerNo ratings yet
- 8051 SlidesDocument42 pages8051 SlidesRituparnaNo ratings yet
- Timers, Serial, InterDocument107 pagesTimers, Serial, Inters sreehari,No ratings yet
- ARM Parallel IODocument34 pagesARM Parallel IOAaaa AaaaNo ratings yet
- Unit 3-Control Unit OperationDocument59 pagesUnit 3-Control Unit OperationKrishna AsharNo ratings yet
- First Semester: Es 15 101 System Design Using Embedded ProcessorsDocument2 pagesFirst Semester: Es 15 101 System Design Using Embedded ProcessorsFarah MafatNo ratings yet
- ARM Cortex M3 Based Collision Detection SystemDocument3 pagesARM Cortex M3 Based Collision Detection SystemseventhsensegroupNo ratings yet
- One Step Majority DecoderDocument18 pagesOne Step Majority DecoderAkshay Doshi100% (1)
- Integrator AmplifierDocument5 pagesIntegrator AmplifierAhmed ShaabanNo ratings yet
- 4 MuxDocument12 pages4 MuxsunnysNo ratings yet
- STM32 GpioDocument5 pagesSTM32 Gpioमेनसन लाखेमरू100% (1)
- Logic Gates ReviewerDocument4 pagesLogic Gates Reviewermercadogliona1113No ratings yet
- MPMC Unit4Document61 pagesMPMC Unit4Nandhini ShreeNo ratings yet
- XC8 Tutorial Ee3954 Fall12 13 C Part2Document13 pagesXC8 Tutorial Ee3954 Fall12 13 C Part2varuntejavarma100% (1)
- DS1104 by Monnzongo Daniel ENSETDocument4 pagesDS1104 by Monnzongo Daniel ENSETGistain NgomeNo ratings yet
- Controlling Stepper Motors With A PIC MicrocontrollerDocument16 pagesControlling Stepper Motors With A PIC Microcontrollervasudeva yasas100% (1)
- Coa Unit-4 NotesDocument44 pagesCoa Unit-4 NotesKavya ReddyNo ratings yet
- STM32F407VGT General-Purpose I/Os (GPIO)Document5 pagesSTM32F407VGT General-Purpose I/Os (GPIO)service informatiqueNo ratings yet
- EloTrain - Plug-In System ShortDocument59 pagesEloTrain - Plug-In System ShortPaul Daniel Echeandia Lamadrid100% (1)
- PLL 565Document6 pagesPLL 565Dinesh Kumar MehraNo ratings yet
- Digital Thermometer Using 8051 Microcontroller Project ReportDocument18 pagesDigital Thermometer Using 8051 Microcontroller Project ReportZakaria BelyamaniNo ratings yet
- Frequency MeterDocument5 pagesFrequency Meterlaithnatour0% (1)
- Semiconductor and Programmable Logic DeviceDocument35 pagesSemiconductor and Programmable Logic DeviceTHE PAINKILLERSNo ratings yet
- KL 210Document4 pagesKL 210ghenriquezNo ratings yet
- PIC 16F84 Tutorial: IntroductionDocument12 pagesPIC 16F84 Tutorial: IntroductionAbhishek GoelNo ratings yet
- A Y-Chromosomal Comparison of The Madjars (Kazakhstan) and The Magyars (Hungary)Document6 pagesA Y-Chromosomal Comparison of The Madjars (Kazakhstan) and The Magyars (Hungary)Ingwaar RosensonNo ratings yet
- Basic 4 PPC ManualDocument1,360 pagesBasic 4 PPC ManualIngwaar Rosenson100% (1)
- Troubleshooting Basic TCP/IP Problems: Step 1: Check The ConfigurationDocument9 pagesTroubleshooting Basic TCP/IP Problems: Step 1: Check The ConfigurationIngwaar RosensonNo ratings yet
- Basic Parsing Techniques - ParsingDocument20 pagesBasic Parsing Techniques - ParsingbigestaNo ratings yet
- Solute Transport Numerical MethodsDocument22 pagesSolute Transport Numerical Methodsbong109No ratings yet
- Homework Problems: X X y yDocument6 pagesHomework Problems: X X y yss_nainamohammedNo ratings yet
- Reading Combined Iimr 2014Document46 pagesReading Combined Iimr 2014asdfg1987No ratings yet
- RA1 Biologicwidth BhochhibhoyaADocument10 pagesRA1 Biologicwidth BhochhibhoyaAJony OcañaNo ratings yet
- Cable Lan F/FTP Cat6: Not Yet Anatel ApprovedDocument2 pagesCable Lan F/FTP Cat6: Not Yet Anatel ApprovedAlerick VelascoNo ratings yet
- Uoc R1Document12 pagesUoc R1Ahmed Khaled SeadaNo ratings yet
- Analog - Electronic 15ec32Document263 pagesAnalog - Electronic 15ec32Harshitha Reddy100% (1)
- Bellow Design Calc. - 2194 PDFDocument1 pageBellow Design Calc. - 2194 PDFDavidNo ratings yet
- Davisa Data Assignment Description Sec 1 and 2Document6 pagesDavisa Data Assignment Description Sec 1 and 2api-739527028No ratings yet
- Fax #/ Fax No. / Fax N ° / Fax Nr. / Fax #/ Fax N°Document4 pagesFax #/ Fax No. / Fax N ° / Fax Nr. / Fax #/ Fax N°CeramiatNo ratings yet
- Yamane Instrument Flange IOL TechniqueDocument4 pagesYamane Instrument Flange IOL Techniqueophtho india incNo ratings yet
- Multigame 7XDocument19 pagesMultigame 7XRafael Posadas Gibaja100% (1)
- Astrophysics QuestionsDocument19 pagesAstrophysics QuestionsMauzoom AliNo ratings yet
- Venta 2016Document26 pagesVenta 2016lucaastenorioNo ratings yet
- 58 A Study of Extrudate Swell Behavior in Tread DieDocument10 pages58 A Study of Extrudate Swell Behavior in Tread DieLalangNo ratings yet
- ABSDTCDocument5 pagesABSDTCMOAMMEDNo ratings yet
- Astm A500Document5 pagesAstm A500Pierre Papeen67% (3)
- Introduction To Molecular BiologyDocument82 pagesIntroduction To Molecular Biologyfarzaana100% (2)
- Board ProblemsDocument5 pagesBoard ProblemsJan Roald Buemia TriumfanteNo ratings yet
- Board Question Paper: March 2018: Science and Technology - IDocument2 pagesBoard Question Paper: March 2018: Science and Technology - ISIDDHESH WADEKARNo ratings yet
- Zeiss 2010 Hunting CatalogDocument44 pagesZeiss 2010 Hunting CatalogMario LopezNo ratings yet
- Summative Q3 Science Week 3 AND 4Document3 pagesSummative Q3 Science Week 3 AND 4Ana Maureen CuarteronNo ratings yet
- Hard Disk MetadataDocument12 pagesHard Disk MetadataFinnbarr P. MurphyNo ratings yet
- Chapter Two C++Document64 pagesChapter Two C++mift ademNo ratings yet
- (Ebooks PDF) Download Artificial Intelligence in Manufacturing Research 1st Edition J. Paulo Davim Full ChaptersDocument84 pages(Ebooks PDF) Download Artificial Intelligence in Manufacturing Research 1st Edition J. Paulo Davim Full Chaptersmilakoffon100% (3)
- InfiniSolar Plus 5KW Manual 201501203Document54 pagesInfiniSolar Plus 5KW Manual 201501203phanvanhtNo ratings yet
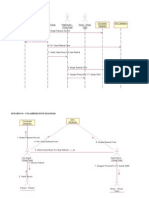
- Senario #1 - Sequence DiagramDocument6 pagesSenario #1 - Sequence DiagramMissmargareta JebaNo ratings yet