0% found this document useful (0 votes)
90 viewsLab 3 - Introduction To MATLAB: G(S) S (S + 1) (S + 2)
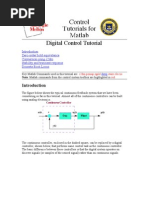
This document provides an introduction to MATLAB and instructions for a lab exercise on modeling and analyzing control systems using MATLAB. The lab involves entering transfer functions symbolically in MATLAB, plotting open-loop bode plots and root loci, determining gain and phase margins, simulating closed-loop step responses to determine time domain characteristics, and simulating steady-state error to a ramp input. Students are asked to model a DC motor system from a previous lab and analyze its open-loop and closed-loop bode plots.
Uploaded by
saharCopyright
© Attribution Non-Commercial (BY-NC)
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
90 viewsLab 3 - Introduction To MATLAB: G(S) S (S + 1) (S + 2)
This document provides an introduction to MATLAB and instructions for a lab exercise on modeling and analyzing control systems using MATLAB. The lab involves entering transfer functions symbolically in MATLAB, plotting open-loop bode plots and root loci, determining gain and phase margins, simulating closed-loop step responses to determine time domain characteristics, and simulating steady-state error to a ramp input. Students are asked to model a DC motor system from a previous lab and analyze its open-loop and closed-loop bode plots.
Uploaded by
saharCopyright
© Attribution Non-Commercial (BY-NC)
Available Formats
Download as PDF, TXT or read online on Scribd
/ 3