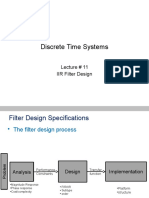
Advanced Digital Systems
Advanced Digital Systems
Download as pdf or txt
You might also like
- Aadhar Data ValutDocument18 pagesAadhar Data ValutSureka SwaminathanNo ratings yet
- Pei ViewDocument38 pagesPei ViewEnrique TorresNo ratings yet
- WinPlot Major Features SummaryDocument29 pagesWinPlot Major Features Summaryanhntran4850No ratings yet
- TMA1301 Assignment T2 - 1617Document3 pagesTMA1301 Assignment T2 - 1617ASHVEIN KUMARAN A L RANGASAMYNo ratings yet
- What To Do When You See The Message, 'Update Was Terminated'Document9 pagesWhat To Do When You See The Message, 'Update Was Terminated'anoopr28No ratings yet
- Efficient Design of FIR Filter Using Modified Booth MultiplierDocument5 pagesEfficient Design of FIR Filter Using Modified Booth MultiplierijsretNo ratings yet
- DSP ReportDocument5 pagesDSP ReportKurnia WanNo ratings yet
- Chapter 15 - Digital Filter Design - Book - Programming DsPIC MCU in PASCAL - MikroElektronika1111Document9 pagesChapter 15 - Digital Filter Design - Book - Programming DsPIC MCU in PASCAL - MikroElektronika1111huthaifa85No ratings yet
- Design Technique of Bandpass FIR Filter Using Various Window FunctionDocument6 pagesDesign Technique of Bandpass FIR Filter Using Various Window FunctionSai ManojNo ratings yet
- UT Dallas Syllabus For Ee4361.001.07s Taught by P Rajasekaran (pkr021000)Document5 pagesUT Dallas Syllabus For Ee4361.001.07s Taught by P Rajasekaran (pkr021000)UT Dallas Provost's Technology GroupNo ratings yet
- Tanner EDA Tools v16.3 Release NotesDocument60 pagesTanner EDA Tools v16.3 Release NotesMohiuddin Mohammad100% (1)
- MXG Creating Waveforms GuideDocument100 pagesMXG Creating Waveforms Guidesalloum18No ratings yet
- Applications of Active Filters 1Document1 pageApplications of Active Filters 1Yawar ArslanNo ratings yet
- NCEAC Course File FormatDocument4 pagesNCEAC Course File FormatZaheer AbbasNo ratings yet
- Final Comb Filter PPT - 2007Document19 pagesFinal Comb Filter PPT - 2007Subrat BarsainyaNo ratings yet
- SDN Community Contribution: Material Master Download To PCSDocument45 pagesSDN Community Contribution: Material Master Download To PCSSamik BiswasNo ratings yet
- Srs of CharityDocument35 pagesSrs of CharityPreethu GowdaNo ratings yet
- C&DS NotesDocument98 pagesC&DS NotesAnanth NathNo ratings yet
- Design and Implementation of LUT Optimization Using APC-OMS SystemDocument10 pagesDesign and Implementation of LUT Optimization Using APC-OMS SystemIJCERT PUBLICATIONS100% (1)
- Csc419: Computer Science Project Proposal Writing GuidelineDocument14 pagesCsc419: Computer Science Project Proposal Writing GuidelineShekisa PharmmyNo ratings yet
- DSP Lect 11 Iir DesignDocument50 pagesDSP Lect 11 Iir DesignSayyeda UmbereenNo ratings yet
- Chapter 1 Query ProcessingDocument45 pagesChapter 1 Query ProcessingWaal Mk100% (1)
- Piartool - Sys - Standalone Off: Informational MessagesDocument1 pagePiartool - Sys - Standalone Off: Informational MessagesPelife GoNo ratings yet
- Smart Farming System - CompressDocument31 pagesSmart Farming System - Compresskamaleshupadhyay388100% (1)
- Factors in Software Quality. Volume-III. Preliminary Handbook On Software Quality For An Acquisiton ManagerDocument42 pagesFactors in Software Quality. Volume-III. Preliminary Handbook On Software Quality For An Acquisiton ManageraliaseelshareefNo ratings yet
- Coventor TutorialDocument45 pagesCoventor Tutorialrp9009No ratings yet
- Comparison of Noise Removal and Echo Cancellation For Audio SignalsDocument3 pagesComparison of Noise Removal and Echo Cancellation For Audio SignalsamiglaniNo ratings yet
- Debre Markos University: Institute: Dmit Program: Software Engineering Year: 4 Course: Software Component DesignDocument78 pagesDebre Markos University: Institute: Dmit Program: Software Engineering Year: 4 Course: Software Component DesignGetachew ChanieNo ratings yet
- Release Notes DTM LibraryDocument21 pagesRelease Notes DTM Librarythanh_cdt01No ratings yet
- Nymble FinalDocument77 pagesNymble FinalWasif Anwar100% (1)
- Table of ContentDocument17 pagesTable of ContentEbby OnyekweNo ratings yet
- Labview State Machine Architectures: Presented by Scott Sirrine Eaton CorporationDocument12 pagesLabview State Machine Architectures: Presented by Scott Sirrine Eaton CorporationSeVictor Rudas CajaNo ratings yet
- Software Design SpecificationDocument21 pagesSoftware Design SpecificationBEST BEST100% (1)
- Chapter Three Software AnaylysDocument23 pagesChapter Three Software AnaylysSomali IQ option Trades •100% (1)
- M2000 Technical Manual V6 300 PDFDocument271 pagesM2000 Technical Manual V6 300 PDFmohamedwalyNo ratings yet
- Decuscope Vol03 1964Document48 pagesDecuscope Vol03 1964kgrhoadsNo ratings yet
- Implimentation of OFDM in ADS Progress ReportDocument35 pagesImplimentation of OFDM in ADS Progress ReportGaurav Krishna SharmaNo ratings yet
- Nexys4 PDM RefProj2 V2Document12 pagesNexys4 PDM RefProj2 V2Vale Conde Cuatzo100% (2)
- CST EM STUDIO - Workflow and Solver Overview PDFDocument84 pagesCST EM STUDIO - Workflow and Solver Overview PDFDebidas Kundu100% (1)
- Input Design and PrototypingDocument28 pagesInput Design and PrototypingRajendra UpadhyayNo ratings yet
- AE306 Digital Signal ProcessingDocument2 pagesAE306 Digital Signal Processingjaike0% (1)
- Acs Tech90Document191 pagesAcs Tech90ramjoce100% (1)
- Amcrest Cgi SDK API 3Document117 pagesAmcrest Cgi SDK API 3AmcrestNo ratings yet
- 3 Pipelining and Parallel ProcessingDocument34 pages3 Pipelining and Parallel ProcessingRaghunandan KomandurNo ratings yet
- Complex FiltersDocument14 pagesComplex Filterswrite2arshad_mNo ratings yet
- SRT DivDocument8 pagesSRT Divdeepika0821843No ratings yet
- Abera AbebawDocument80 pagesAbera AbebawdagneNo ratings yet
- Tiger SHARC ProcessorDocument36 pagesTiger SHARC ProcessorChintan PatelNo ratings yet
- Leader Lv5750Document2 pagesLeader Lv5750gibonulNo ratings yet
- Assign 1 SolnsDocument2 pagesAssign 1 SolnsIann Clarke100% (1)
- Worklog 5761 SyncDocument14 pagesWorklog 5761 Synctuanhai1989No ratings yet
- The Systems Development EnvironmentDocument6 pagesThe Systems Development EnvironmentAhimbisibwe BakerNo ratings yet
- TIFF To GIF Converter & LZW Compression Algorithm FPGA Implementation PDFDocument76 pagesTIFF To GIF Converter & LZW Compression Algorithm FPGA Implementation PDFJosquin CorralesNo ratings yet
- Network Time ProtocolDocument19 pagesNetwork Time Protocoljayanth_babluNo ratings yet
- Ansi - Scte 104 2004Document137 pagesAnsi - Scte 104 2004Vojislav RadosavljevicNo ratings yet
- Verilog Code For Fir Filter MGHMHBDocument6 pagesVerilog Code For Fir Filter MGHMHBsivasankarmeae100% (1)
- Gui Calculator: A Python ProjectDocument8 pagesGui Calculator: A Python Projectanuj tomarNo ratings yet
- RII & RIF FiltersDocument13 pagesRII & RIF FiltersMedab Abd El MalekNo ratings yet
- Fir and Iir Digital Filter Design GuideDocument11 pagesFir and Iir Digital Filter Design Guidecatia_v5rNo ratings yet
- Full Text 02Document45 pagesFull Text 02xzcNo ratings yet
- Dokumen - Pub Iec 61850 Demystified 9781630813291Document319 pagesDokumen - Pub Iec 61850 Demystified 9781630813291Faazil Fairooz100% (2)
- Powermax Brochure 2Document12 pagesPowermax Brochure 2Faazil FairoozNo ratings yet
- Coventry University: Faculty of Engineering & ComputingDocument41 pagesCoventry University: Faculty of Engineering & ComputingFaazil FairoozNo ratings yet
- Communication ModulationsDocument34 pagesCommunication ModulationsFaazil FairoozNo ratings yet
- Sn7414 Schmitt TriggerDocument13 pagesSn7414 Schmitt TriggerFaazil FairoozNo ratings yet
- HTXLPESPEC2006Document11 pagesHTXLPESPEC2006Faazil FairoozNo ratings yet
- CH 01Document39 pagesCH 01Mubasher Sultan MehmoodNo ratings yet
- Ruckus Warranty FaqsDocument5 pagesRuckus Warranty FaqsFabian GarzonNo ratings yet
- My Home Sphere - Services in The Intelligent Wireless Home: Project P1206Document6 pagesMy Home Sphere - Services in The Intelligent Wireless Home: Project P1206HoangMingNo ratings yet
- Advanced Certification Exam Prep GuideDocument21 pagesAdvanced Certification Exam Prep Guidesimha1177No ratings yet
- Axle Counter System BO23: Origin of Your SafetyDocument2 pagesAxle Counter System BO23: Origin of Your SafetyMadhusudan RNo ratings yet
- Group 1 Enumeration: Multiple ChoiceDocument18 pagesGroup 1 Enumeration: Multiple ChoiceRanin, Manilac Melissa SNo ratings yet
- Mainboard ESC Model P4M800PRO MDocument29 pagesMainboard ESC Model P4M800PRO MHo Thanh BinhNo ratings yet
- Thầy TuấnDocument283 pagesThầy TuấnBùi Việt ĐứcNo ratings yet
- PLSQL 9 4 SGDocument19 pagesPLSQL 9 4 SGAndriyNo ratings yet
- Workshop #1: Foundations of Java Language: Learning OutcomesDocument5 pagesWorkshop #1: Foundations of Java Language: Learning OutcomesLong ShinoNo ratings yet
- Cisco Feature Navigator - Cisco SystemsDocument14 pagesCisco Feature Navigator - Cisco SystemsJason LixfeldNo ratings yet
- MBA (BA) I Introduction To Business Analytics With Data Science 2021Document1 pageMBA (BA) I Introduction To Business Analytics With Data Science 2021mohiniNo ratings yet
- Coding Interview Prep Document Application Engineer, SAP: Time To Prepare!Document7 pagesCoding Interview Prep Document Application Engineer, SAP: Time To Prepare!Kanchan ChakrabortyNo ratings yet
- Adobe Acrobat Xi Pro 1102 Torrent PDFDocument4 pagesAdobe Acrobat Xi Pro 1102 Torrent PDFSaraNo ratings yet
- Ethernet Isolator 50 818Document2 pagesEthernet Isolator 50 818iaNo ratings yet
- Excel 365-2019 Lesson 4 PresentationDocument19 pagesExcel 365-2019 Lesson 4 PresentationBernardo SetúbalNo ratings yet
- DS1000DE ProgrammingGuide EN PDFDocument135 pagesDS1000DE ProgrammingGuide EN PDFSneider LandinezNo ratings yet
- Nemo Outdoor User ManualDocument392 pagesNemo Outdoor User ManualВеселый ЛунтикNo ratings yet
- Apache Kafka Transaction Data Streaming For DummiesDocument47 pagesApache Kafka Transaction Data Streaming For DummiesLucas Da Costa CardozoNo ratings yet
- Editor's Note: Science China Information SciencesDocument1 pageEditor's Note: Science China Information SciencesMichal ShimanovichNo ratings yet
- Oracle Purchase Order Training: Carnegie Mellon UniversityDocument89 pagesOracle Purchase Order Training: Carnegie Mellon UniversityTarkNo ratings yet
- c.pCO and tERA: Customer Solution TeamDocument4 pagesc.pCO and tERA: Customer Solution TeamwilliamdevideNo ratings yet
- NEH - Fellowships 2015Document18 pagesNEH - Fellowships 2015zavalaoNo ratings yet
- Polyspace Code Verification: Coding Standards Report For Project: PolyspaceDocument30 pagesPolyspace Code Verification: Coding Standards Report For Project: PolyspaceLoc HuynhNo ratings yet
- Module 1 Cybercrime Estrada-1-1Document31 pagesModule 1 Cybercrime Estrada-1-1Mayck Jhoenell Lomboy100% (1)
- PC 910 Adv Work Flow Guide enDocument298 pagesPC 910 Adv Work Flow Guide enrakesh154243No ratings yet
- Unit 1 PCSDocument101 pagesUnit 1 PCSKundan JhaNo ratings yet
- VedHymns p2 PDFDocument529 pagesVedHymns p2 PDFKamakshi Kripa KendraNo ratings yet
- Curtain Control Systems Development On Mesh Wireless Network of The Smart HomeDocument12 pagesCurtain Control Systems Development On Mesh Wireless Network of The Smart HomeNguyen QuocNo ratings yet