
Multiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of Electrons
Uploaded by
Luis Alberto FuentesCopyright:
Available Formats
Multiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of Electrons
Uploaded by
Luis Alberto FuentesOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Copyright:
Available Formats
Multiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of Electrons
Uploaded by
Luis Alberto FuentesCopyright:
Available Formats
Multiscale Splitting Method for the
BoltzmannPoisson Equation: Application to the
Dynamics of Electrons
J urgen Geiser
Ernst-Moritz-Arntz University of Greifswald,
Department of Physics,
Domstr. 14, D-17487 Greifswald, Germany
juergen.geiser@uni-greifswald.de
Abstract. In this paper we present a model based on dynamics of elec-
trons in a plasma using a simplied Boltzmann equation coupled with
Poissons equation. The motivation arose from simulating active plasma
resonance spectroscopy, which is used for plasma diagnostic techniques,
see [1], [15] and [16]. Mathematically, we are interested in designing split-
ting methods for the model problem. While the full Boltzmann equation
is delicate to solve, we decouple it into a transport and collision part,
which are then solved in dierent ways. First we reduce to a simplied
transportcollision equation and start to analyse the abstract Cauchy
problem using semigroup methods. Second, we pass to the coupled trans-
port and collision model and apply the splitting ideas, resecting the dier-
ent discretisation schemes. The results are discussed rst with numerical
experiments and then we verify the underlying theoretical novelties.
Keywords: kinetic model, neutron transport, dynamics of electrons, trans-
port equation, splitting schemes, semigroup.
AMS subject classications. 35K25, 35K20, 74S10, 70G65.
1 Introduction
Our motivate arose from studying the simulation of active plasma resonance
spectroscopy, a well established plasma diagnostic technique. To study this tech-
nique with simulation models, we concentrate on an abstract kinetic model that
describes the dynamics of the electrons in a plasma by using a Boltzmann equa-
tion. The Boltzmann equation is coupled with the electric eld and we obtain
coupled partial dierential equations. The full Boltzmann equation is a very del-
icate equation to solve. Therefore, we decouple this into transport and collision
contributions, which are solved in dierent ways. While nite dierence schemes
are applied to the transpoort parts, the collision part is solved with numerical
integration schemes. The underlying splitting scheme is theortically discussed as
an abstract Cauchy problem. Here, we could address the Cauchy problem with
2
functional analytical tools. First, we will discuss the description of a positive
semigroup, which helps to carry out the numerical estimates in the splitting
schemes. Second, a numerical method is discussed with respect to separate dif-
ferential and integral parts of the equations. The numerical approximation of
the abstract splitting scheme is made by applying an iterative splitting method
of the second order.
The paper is outlined as follows. In Section 2, we present our mathematical model
and a possible reduced model for further approximations. The functional analyt-
ical setting with semigroups is discussed in Section 3. The splitting schemes are
presented in Section 4. The results of some numerical experiments are exhibited
in Section 6. In the conclusions that are given in Section 7, we summarize our
results.
2 Mathematical Model
In the following a model is presented whose physical motivation is explained in
[1], [15] and [16].
The kinetic model considers a uid dynamical approach to treat the natural
ability of plasmas to resonate near the electron plasma frequency
pe
.
Here we specialise to an abstract kinetic model to describe the dynamics of
the electrons in the plasma which allows this resonance.
The Boltzmann equation for the electrons is:
f(x, v, t)
t
= A[f(x, v, t)] +B[f(x, v, t)], (x, v)
x
v
, t [0, T], (1)
A[f] = v
x
f(x, v, t)
e
m
e
x
v
f(x, v, t), (2)
B[f] = (x, v, t)f(x, v, t) +
_
V
(x, v, v
)f(x, v
, t) dv
, (3)
f(x, v, 0) = f
0
(x, v), (x, v)
P,x
P,v
, (4)
f(x, v, t) = f
1
(x, v), (x, v)
P,x
P,v
, (5)
where
P,x
P,v
IR
3
IR
3
is the six-dimensional phase space. f :
P,x
P,v
[0, T] X
c
is the density function and X
c
is an appropriate smooth
space, e.g. C
2
. f
0
is the initial function and the f
1
is the boundary condition in
the plasma phase space
P,x
P,v
.
We assume, based on the dierent materials (a plasma and a dielectricum) a
complete reection of the electrons due to the sheath f(v
||
+v
) with v
||
, which
is the parallel and v
perpendicular to the surface normal vector. Further the
electric force-eld is given as F = e
x
, where :
P,x
X
c
is the potential
and X
c
is an appropriate smooth space, e.g. C
2
.
Boltzmanns equation is coupled with the electric eld , while the potential
is approximated via Poissons equation. The electrostatic approximation of the
eld is represented by a potential that is valid on the complete velocity volume
3
S
P,v
and apply Poissons equation:
x
() =
_
e(n
i
(x)
_
f dS) in x
P,x
0 in x
D,x
, (6)
where the full space domain is
x
=
P,x
D,x
IR
3
and the full velocity
domain is
v
=
P,v
D,v
. The permittivity is equal to
0
in the plasma
P,x
and
0
D
in the dielectric
D,x
. fullls the boundary conditions U
n
at any
electrode E
n
and n = 0 at isolator I, whereas n is the normal vector of
the isolator surface.
On the surface of the dielectric, a surface charge may accumulate, which
leads to a transition condition:
() = . (7)
We will make the following assumption to modify the model into a simpler and
more tractable system of equations, which allows linearizing and simplifying the
Boltzmann equations, see [20].
First we assume we have an analytical solution of the potential , such that
we could reset to a diusive term as:
F
m
e
v
x
D
x
, (8)
where D is the diusion tensor and F = e is the external force. This modied
model allows employing the following semi-group theory and deriving splitting
schemes for the model.
The modied and splittable model equation is
f(x, v, t)
t
= A[f(x, v, t)] +B[f(x, v, t)], (x, v)
x
v
, t [0, T], (9)
A[f] = v
x
f(x, v, t)
x
D
x
f(x, v, t), (10)
B[f] = (x, v, t)f(x, v, t) +
_
V
(x, v, v
)f(x, v
, t) dv
, (11)
f(x, v, 0) = f
0
(x, v), (x, v)
P,x
P,v
, (12)
f(x, v, t) = f
1
(x, v), (x, v)
P,x
P,v
. (13)
Next, we will discuss the relevant semigroup theory.
3 Semigroups for Transport Equations
In the following, we derive the exponential growth of the transport semigroups
that are used in the section on the numerical methods.
We discuss two aspects:
Neutron transport,
Electron transport.
The dierence of the two transport schemes are:
Neutron transport is not inuenced by an electric eld,
Electron transport is inuenced by an electric eld.
4
3.1 Transport model for the neutrons
For this model we can assume that f(x, v, t) describes the density distribution
of the particles at position x S with speed v V at time t [0, T], see also
[3] and [17].
The space S is assumed to be a compact and convex subset of IR
3
with
nonempty interior, and the velocity space V is
V := {v IR
3
: v
min
||||
2
v
max
}
for v
min
> 0 and v
max
< .
Assumption 31 We make the following assumptions:
Particles move according to their speed v.
Particles are absorbed according to the probability given by the function
which depends on x and v.
Particles are scattered according to a scattering kernel depending on x, the
incoming speed v
, and the outgoing speed v.
Then the neutron transport is
f(x, v, t)
t
= v f(x, v, t) (x, v, t)f(x, v, t) (14)
+
_
V
(x, v, v
)f(x, v
, t) dv
,
f(x, v, 0) = f
0
(x, v), (15)
and boundary conditions are included in the transport operator A
0
see, in the
following, the abstract Cauchy problem.
We next treat the abstract Cauchy problem for this simplied model.
Abstract Cauchy problem: Transport model for the neutrons We have
a Banach space X := L
1
(S V ) with Lebesgue measure on S V IR
6
and
dene the abstract Cauchy problem as:
du(t)
dt
= Bu(t) , (16)
du(t)
dt
= (A
0
M
+K
)u(t) , (17)
u(0) = u
0
, (18)
where u X.
We have the following operators:
1.) Collisionless transport operator
2.) Absorption operator
3.) Scattering Operator
Important results for the further numerical analysis is the fact that the trans-
port semigroup can be estimated by an exponential growth, see [3]:
5
Corollary 1. We assume that s(B) > is a dominant eigenvalue and (S(t))
t0
is irreducible. Then the transport semigroup (S(t))
t0
has balanced exponential
growth. There exists a one-dimensional projection P satisfying 0 < Pf whenever
0 < f such that:
|| exp(s(B)t)S(t) P|| M exp(t), (19)
for all t 0 and appropriate M 1 and > 0.
3.2 Transport model for the electrons or ions
For this model we can assume that f(x, v, t) describes the density distribution
of particles at position x S with speed v V at time t [0, T], see also [3]
and [17].
The space S is assumed to be a compact and convex subset of IR
3
with
nonempty interior, and the velocity space V is
V := {v IR
3
: v
min
||||
2
v
max
}
for v
min
> 0 and v
max
< .
Assumption 32 We make the following assumptions:
Particles move according to their speed v.
Particles are absorbed according to the probability given by the function
which depends on x and v.
Particles are scattered according to a scattering kernel depending on x, the
incoming speed v
, and the outgoing speed v.
Particles are inuenced by the static electric eld , which can be derived by
the kinetic theory.
The electron transport is
f(x, v, t)
t
= v
x
f(x, v, t)
e
m
e
x
v
f(x, v, t)
(x, v, t)f(x, v, t) +
_
V
(x, v, v
)f(x, v
, t) dv
, (20)
f(x, v, 0) = f
0
(x, v), (21)
and boundary conditions are included in the transport operators. is the electric
eld.
Furthermore, we have Poissons equation,
x
() =
_
e(n
i
_
f dS) in P
0 inD
, (22)
the permittivity is equal to
0
in the plasma P and
0
D
in the dielectric D.
6
For the simplication, we assume to solve the Poissons equation analytically
with:
=
_
D(f)dx =
__
P
1
_
P
e(n
i
_
f dS)dx dx in P
0 inD
, (23)
where D is the analytical function of the electric eld
x
.
We embed the electric eld analytically into the transport equation.
f(x, v, t)
t
= v
x
f(x, v, t)
x
D(f)
x
f(x, v, t)
(x, v, t)f(x, v, t) +
_
V
(x, v, v
)f(x, v
, t) dv
, (24)
f(x, v, 0) = f
0
(x, v), (25)
and boundary conditions are included in the transport operators A
0
and A
1
,
see, in the following, the treatment of the abstract Cauchy problem. D(f) is the
diusion parameter that includes the electric eld and we assume to approximate
via a constant operator D D(f).
Next we treat the abstract Cauchy problem for a transport model for the
electrons or ions.
Abstract Cauchy problem: Transport model for the electrons or ions.
We have a Banach space X := L
1
(SV ) with Lebesgue measure on SV IR
6
and dene the abstract Cauchy problem as
du(t)
dt
= Bu(t) , (26)
du(t)
dt
= (A
0
+A
1
M
+K
)u(t) , (27)
u(0) = u
0
, (28)
where u X.
We have the operators
1.) Collisionless transport operator
2.) Diusion operator
3.) Absorption operator
4.) Scattering Operator
An important result for the further numerical analysis is the fact that the
transport semigroup can be estimated by an exponential growth. Due to the
analytical embedding of the electric eld, we could also estimate such operator.
Corollary 2. We assume that s(
B) > is a dominant eigenvalue and (S(t))
t0
is irreducible Then the transport semigroup (S(t))
t0
has balanced exponential
growth. There exists a one-dimensional projection
P satisfying 0 <
Pf whenever
0 < f such that:
|| exp(s(
B)t)S(t)
P||
M exp(t), (29)
for all t 0 and appropriate
M 1 and > 0.
7
In the next section we discuss the splitting schemes.
4 Splitting Schemes
In general, operator splitting methods are used to solve complex models in geo-
physical and environmental physics. They have been developed and applied in
[19], [21] and [22].
4.1 Sequential splitting method for nonlinear problems
For our problems, nonlinear splitting schemes are necessary, see [13]. We could
use the result for the general formulation of nonlinear ordinary dierential equa-
tions, which are given by
c
(t) = F
1
(t, c(t)) +F
2
(t, c(t)) , (30)
where the initial conditions are c
n
= c(t
n
).
As before, we can decouple the above problem into two (usually simpler)
sub-problems, namely,
c
(t)
t
= F
1
(t, c
(t)) with t
n
t t
n+1
and c
(t
n
) = c
n
, (31)
c
(t)
t
= F
2
(t, c
(t)) with t
n
t t
n+1
and c
(t
n
) = c
(t
n+1
) , (32)
where the initial values are given by c
n
= c(t
n
) and the split approximation on
the next time level is dened as c
n+1
= c
(t
n+1
).
For this case, the splitting error can be determined by using the Jacobians
of the non-linear mappings F
1
and F
2
:
n
=
1
2
[
F
1
c
F
2
,
F
2
c
F
1
](t
n
, c(t
n
)) +O(
2
n
) . (33)
Hence, for the general case, the splitting error is of rst order, i.e., O(
n
).
Remark 1. Higher order splitting methods are given in [10]. Based on the Strang
splitting, higher order nonlinear splitting methods are also possible, see [2].
In the next subsection we present the iterative splitting method.
4.2 Iterative splitting method
Alternatives are iterative approaches to nonlinear splitting schemes.
We concentrate again on nonlinear dierential equations of the form
du
dt
= A(u(t))u(t) +B(u(t))u(t), with u(t
n
) = u
n
, (34)
8
where A(u), B(u) are matrices with nonlinear entries and densely dened, where
we assume that the entries involve the spatial derivatives of c, see [23]. In the
following we discuss the standard iterative operator splitting method as a xed-
point iteration method to linearize the operators.
We split our nonlinear dierential equation (34) by applying
dui(t)
dt
= A(u
i1
(t))u
i
(t) + B(u
i1
(t))u
i1
(t), with u
i
(t
n
) = c
n
, (35)
dui+1(t)
dt
= A(u
i1
(t))u
i
(t) + B(u
i1
(t))u
i+1
(t), with u
i+1
(t
n
) = c
n
, (36)
where the time step is = t
n+1
t
n
. The iterations are i = 1, 3, . . . , 2m + 1.
u
0
(t) = c
n
is the starting solution, where we assume that the solution c
n+1
is
near c
n
, or u
0
(t) = 0. Thus we have to solve the local xed-point problem. c
n
is
the known split approximation at time level t = t
n
.
The split approximation at time level t = t
n+1
is dened as c
n+1
= u
2m+2
(t
n+1
).
We assume that the operators A(u
i1
(t
n+1
)), B(u
i1
(t
n+1
)) are constant for
i = 1, 3, . . . , 2m+1. Here the linearization is done with respect to the iterations,
such that A(u
i1
), B(u
i1
) are at least non-dependent operators in the iterative
equations, and we can apply the linear theory. For the linearization we assume
at least in the rst equation A(u
i1
(t)) A(u
i
(t)), and in the second equation
B(u
i1
(t)) B(u
i+1
(t)), for small t.
We have
||A(u
i1
(t
n+1
))u
i
(t
n+1
) A(u
n+1
)u(t
n+1
)|| ,
for sucient iterations i {1, 3, . . . , 2m+ 1}.
Remark 2. The linearization with the xed-point scheme can be used for smooth
or weakly nonlinear operators, but otherwise we lose the convergence behavior,
not converging to a local xed point, see [14].
5 Numerical Integration of the Integro-Part
We treat the following integro-dierential equation:
u
t
=
_
t
0
u(s) ds, (37)
u(0) = u
0
, (38)
The integration part is done numerically with
Trapezoidal rule:
_
b
a
f(x) dx
b a
n
_
f(a) +f(b)
2
+
n1
k=1
f
_
a +k
b a
n
_
_
(39)
where the subintervals have the form [kh, (k + 1)h], with h = (ba)/n and k =
0, 1, 2, ..., n1.
9
Degree Common name Formula Error term
1 Trapezoid rule
ba
2
(f0 + f1)
(ba)
3
12
f
(2)
()
2 Simpsons rule
ba
6
(f0 + 4f1 + f2)
(ba)
5
2880
f
(4)
()
3 Simpsons 3/8 rule
ba
8
(f0 + 3f1 + 3f2 + f3)
(ba)
5
6480
f
(4)
()
4 Booles rule
ba
90
(7f0 + 32f1 + 12f2 + 32f3 + 7f4)
(ba)
7
1935360
f
(6)
()
Table 1. Numerical integration formula (closed NewtonCotes formula)
The higher order formulas are given as closed NewtonCotes formulas:
where f
i
is a shorthand for f(x
i
), with x
i
= a+i(b a)/n, and n the degree.
We obtain the following formula for the Trapezoid rule,
u
t
= t/2(u(0) +u(t)) ds, (40)
u(0) = u
0
, (41)
and obtain the analytical result
u(t) =
2
2
exp(
t
2
4
)u(0)
1
2
u(0), (42)
For a higher order formula like Simpsons rule, we have
u
t
= t/6(u(0) + 4u(t/2) +u(t)) ds, (43)
u(0) = u
0
. (44)
We apply the idea of a polynomial solution:
u(t) = a
0
+a
1
t +a
2
t
2
+a
3
t
3
+. . .
and we obtain, after dierentiating the coecients,
a
1
+ 2a
2
t + 3a
3
t
2
+. . . (45)
= t/6
_
a
0
+ 4(a
0
+a
1
t/2 +a
2
t
2
/4 +a
3
t
3
/8 +. . .)
+a
0
+a
1
t +a
2
t
2
+a
3
t
3
+. . .
_
,
a
0
= u
0
. (46)
Now, comparing coecients yields
a
0
= u
0
(47)
a
1
= a
3
= a
5
= . . . = 0 (48)
a
2
= 3a
0
(49)
a
4
=
1
12
a
2
, . . . . (50)
10
6 Numerical Experiments
We present the results of our numerical experiments based on the neutron trans-
port. A simplied one-dimensional model is given by
t
c +v
x
c D
xx
c + c =
_
(x, v, v
)c(x, v
, t) dv
.
The velocity v and the diusion D are given by the plasma model. The initial
conditions are given by c(x, 0) = c
0
(x) and the boundary conditions are trivial,
n
c(x, t) = 0.
A rst integral operator is
_
(x, v, v
)c(x, v
, t) dv
=
_
T
0
c(x, t)dt.
A second integral operator is
We assume a simple collision operator: (x, v, v
) = q(v
)(1 +v
2
),
where q(v
) is the potential, e.g., v
2
.
We deal with the rst integral operator and dene the following operators:
A = v
1
x
[1 1 0]I D
1
x
2
[1 2 1]I
B = ( +t)I,
while
exp(Bt) = exp((t +t
2
/2)I),
where I is the identity matrix.
In the following, the simplied real-life problem for a neutron transport equa-
tion, which includes the gain and loss of a neutron, will be presented.
We concentrate on the computational benets of a fast computation of the
iterative scheme, given with matrix exponentials.
The equation is
t
c + Fc =
1
c +
_
t
0
2
c(x, t)dt, in [0, t], (51)
F = v D, (52)
c(x, t) = c
0
(x), on , (53)
c(x, t) = c
1
(x, t), on [0, t]. (54)
In the following, we deal with the semidiscretized equation given by the
matrices
t
C = (A
1
+
2
) C, (55)
where C = (c
1
, . . . , c
I
)
T
is the solution of the species in the mobile phase in each
spatial discretization point (i = 1, . . . , I).
11
We have the following two operators for the splitting method:
A =
D
x
2
_
_
_
_
_
_
_
2 1
1 2 1
.
.
.
.
.
.
.
.
.
1 2 1
1 2
_
_
_
_
_
_
_
(56)
+
v
x
_
_
_
_
_
_
_
1
1 1
.
.
.
.
.
.
1 1
1 1
_
_
_
_
_
_
_
IR
II
(57)
where I is the number of spatial points.
1
=
_
_
_
_
_
_
_
1
0
0
1
0
.
.
.
.
.
.
.
.
.
0
1
0
0
1
_
_
_
_
_
_
_
IR
II
(58)
For the integral term we have the following ideas:
Case 1:
_
t
0
2
c(x, t)dt
2
tc(x, t),
and we obtain the matrix
2
=
_
_
_
_
_
_
_
2
t
2
/2 0
0
2
t
2
/2 0
.
.
.
.
.
.
.
.
.
0
2
t
2
/2 0
0
2
t
2
/2
_
_
_
_
_
_
_
IR
II
. (59)
For the operator splitting scheme, we apply A and B =
1
+
2
and we
apply the iterative splitting method, given in Equations (35)(36).
Case 2:
We integrate the operator B with respect to the previous solutions C
i1
2
(C
i1
) and we obtain the matrix
2
(C
i1
)
=
_
_
_
_
_
_
_
t
0
2
c
1,i1
(x, s) ds 0 0
0
_
t
0
2
c
2,i1
(x, s) ds 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0
_
t
0
2
c
I,i1
(x, s) ds
_
_
_
_
_
_
IR
II
. (60)
12
We obtain B(C) =
2
(C
i1
) +
1
C.
The iterative scheme is given by
For i = 1, 2, . . .
C
i
(t) = exp(A(t t
n
))C(t
n
)
+
_
t
t
n
exp((t s)A)B(C
i1
(s)) ds, t (t
n
, t
n+1
].
(61)
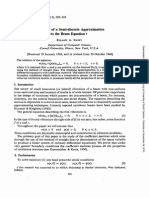
For the reference solution, we apply a ne time- and spatial scale without
decoupling the equations. Figure 1 presents the numerical errors between the
exact and the numerical solution. Here we obtain the optimal results for one-
sided iterative schemes on the operator B, meaning that we iterate with respect
to B and use A as the right hand side.
Remark 3. For all iterative schemes, we can reach faster results than with the
standard schemes, due to the fact that the iterative schemes benet from their
fast computations of the exponential matrices. With from four to ve iterative
steps, we obtain more accurate results than we did with the expensive stan-
dard schemes. With one-sided iterative schemes, we obtain the best convergence
results.
7 Conclusions and Discussion
We presented the coupled model for the transport of deposition species in a
plasma environment. We assumed the ow eld could be computed by the plasma
model and the transport of the deposition species by a transportreaction model.
Such a rst model can help understand the important modeling of the plasma
environment in a CVD reactor.
References
1. N.St.J. Braithwaite and R.N. Franklin. Reections on electrical probes. Plasma
Resource Sci. Technol., 18, 014008, 2009.
2. S. Descombes and M. Thalhammer. The LieTrotter splitting method for nonlinear
evolutionary problems involving critical parameters. A compact local error repre-
sentation and application to nonlinear Schrdinger equations in the semi-classical
regime. IMA J. Numer. Anal., doi: 10.1093/imanum/drs021, 2012.
3. K.-J. Engel and R. Nagel, One-Parameter Semigroups for Linear Evolution Equa-
tions. Springer-Verlag, New York, 2000.
4. I. Farago. Splitting methods for abstract Cauchy problems. In: Lect. Notes Comp.
Sci. vol. 3401, Springer-Verlag, Berlin, 2005, pp. 3545.
5. I. Farago, J. Geiser. Iterative Operator-Splitting methods for Linear Problems.
Preprint No. 1043 of the Weierstrass Institute for Applied Analysis and Stochastics,
Berlin, June 2005.
6. J. Geiser. Numerical Simulation of a Model for Transport and Reaction of Ra-
dionuclides. Proceedings of the Large Scale Scientic Computations of Engineering
and Environmental Problems, Sozopol, Bulgaria, 2001.
13
7. J. Geiser. Decomposition Methods for Partial Dierential Equations: Theory and
Applications in Multiphysics Problems. Chapman & Hall/CRC, 2009.
8. J. Geiser. Computing Exponential for Iterative Splitting Methods. Journal of Ap-
plied Mathematics, special issue: Mathematical and Numerical Modeling of Flow
and Transport, accepted, January 2011.
9. I. Glowinski. The iterative operator-splitting methods. Preprint, University of
Houston, 2004.
10. E. Hansen and A. Ostermann. Exponential splitting for unbounded operators.
Mathematics of Computation, 78:14851496, 2009.
11. W.H. Hundsdorfer. Numerical Solution of AdvectionDiusionReaction Equa-
tions. Technical Report NM-N9603, CWI, 1996.
12. W.H. Hundsdorfer, J. Verwer W. Numerical Solution of Time-dependent
AdvectionDiusionReaction Equations, Springer-Verlag, Berlin, 2003.
13. J. Geiser. Iterative Splitting Methods for Dierential Equations. Chapman &
Hall/CRC, 2011.
14. J. Kanney, C. Miller and C. Kelley. Convergence of iterative split-operator ap-
proaches for approximating nonlinear reactive transport problems. Advances in
Water Resources, 26:247261, 2003.
15. M. Lapke, T. Mussenbrock and R.P. Brinkmann. Modelling of volume- and surface
wave based plasma resonance spectroscopy. Abstracts IEEE International Confer-
ence on Plasma Sciences, pp. 89, 2010.
16. J. Oberrath, M. Lapke, T. Mussenbrock and R.P. Brinkmann. A Functional Ana-
lytical Description of Active Plasma Resonance Spectroscopy in Terms of Kinetic
Theory. Proceedings of the 30th ICPIG, Belfast, August 28September 2, 2011.
17. A. Rhandi. Spectral Theory for Positive Semigroups and Applications. Quaderno
Q. 1-2002, University of Lecce, Italy, 2002.
18. T.K. Senega and R.P. Brinkmann. A multi-component transport model for
non-equilibrium low-temperature low-pressure plasmas. J. Phys. D: Appl.Phys.,
39:16061618, 2006.
19. G. Strang. On the construction and comparision of dierence schemes. SIAM J.
Numer. Anal., 5:506517, 1968.
20. S. Ukai and T. Yang. Mathematical Theory of Boltzmann Equation. Lecture Notes
Series No 8. Liu Bie Ju Center of Mathematical Sciences, City University of Hong
Kong, 2006.
21. J.,G. Verwer and B. Sportisse. A note on operator splitting in a sti linear case.
MAS-R9830, 1998.
22. Z. Zlatev. Computer Treatment of Large Air Pollution Models. Kluwer, 1995.
23. E. Zeidler. Nonlinear Functional Analysis and its Applications. II/B Nonlinear
montone operators Springer-Verlag, Berlin, 1990.
14
10
2
10
1
10
0
10
7
10
6
10
5
10
4
10
3
10
2
10
1
10
0
10
1
AB, Strang, oneside with A
t
e
r
r
L
1
AB
Strang
c1
c2
c3
c4
c5
c6
10
2
10
1
10
0
10
10
10
8
10
6
10
4
10
2
10
0
10
2
AB, Strang, oneside with B
t
e
r
r
L
1
AB
Strang
c1
c2
c3
c4
c5
c6
10
2
10
1
10
0
10
8
10
6
10
4
10
2
10
0
10
2
AB, Strang, twoside
t
e
r
r
L
1
AB
Strang
c1
c2
c3
c4
c5
c6
Fig. 1. Numerical errors of the one-sided splitting scheme with A (upper gure), the
one-sided splitting scheme with B (middle gure), and the iterative schemes with
1, . . . , 6 iterative steps (lower gure).
You might also like
- Multiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of ElectronsNo ratings yetMultiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of Electrons14 pages
- Physics 127a: Class Notes: Lecture 8: PolymersNo ratings yetPhysics 127a: Class Notes: Lecture 8: Polymers11 pages
- P. C. Bressloff Et Al - Oscillatory Waves in Inhomogeneous Neural MediaNo ratings yetP. C. Bressloff Et Al - Oscillatory Waves in Inhomogeneous Neural Media4 pages
- E Cient Solution of The SCHR Odinger-Poisson Equations in Semiconductor Device SimulationsNo ratings yetE Cient Solution of The SCHR Odinger-Poisson Equations in Semiconductor Device Simulations8 pages
- Drift-Diffusion Model: Introduction: Dragica VasileskaNo ratings yetDrift-Diffusion Model: Introduction: Dragica Vasileska9 pages
- Efficient Solution of Schrodinger Poisson Equation PDFNo ratings yetEfficient Solution of Schrodinger Poisson Equation PDF8 pages
- Network Models of Quantum Percolation and Their Field-Theory RepresentationsNo ratings yetNetwork Models of Quantum Percolation and Their Field-Theory Representations13 pages
- A No-Truncation Approach To Cosmic Microwave Background AnisotropiesNo ratings yetA No-Truncation Approach To Cosmic Microwave Background Anisotropies19 pages
- Finite Volume Method For Transonic Potential Flow CalculationsNo ratings yetFinite Volume Method For Transonic Potential Flow Calculations28 pages
- Properties of A Semi-Discrete Approximation To The Beam EquationNo ratings yetProperties of A Semi-Discrete Approximation To The Beam Equation11 pages
- CH 2 - Wave Propagation in Viscous Fluid PDFNo ratings yetCH 2 - Wave Propagation in Viscous Fluid PDF20 pages
- Single Particle Motion in E and B Fields: 1 ReviewNo ratings yetSingle Particle Motion in E and B Fields: 1 Review6 pages
- V A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensateNo ratings yetV A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein Condensate8 pages
- Feshbach Projection Formalism For Open Quantum SystemsNo ratings yetFeshbach Projection Formalism For Open Quantum Systems5 pages
- Solving Linear Unbranched Pathways With Michaelis-Menten Kinetics Using The Lambert W-FunctionNo ratings yetSolving Linear Unbranched Pathways With Michaelis-Menten Kinetics Using The Lambert W-Function19 pages
- Moving Boundary Problems For The BGK Model of Rarefied Gas DynamicsNo ratings yetMoving Boundary Problems For The BGK Model of Rarefied Gas Dynamics3 pages
- Scale Relativity: From Quantum Mechanics To Chaotic DynamicsNo ratings yetScale Relativity: From Quantum Mechanics To Chaotic Dynamics12 pages
- Fourier Approach of Electromagnetism With Hertz Potentials EPJDNo ratings yetFourier Approach of Electromagnetism With Hertz Potentials EPJD10 pages
- A Parallelized Vlasov-Fokker-Planck-Solver For Desktop PCS: Patrik - Schoenfeldt@Kit - EduNo ratings yetA Parallelized Vlasov-Fokker-Planck-Solver For Desktop PCS: Patrik - Schoenfeldt@Kit - Edu9 pages
- Active Brownian Particles: Entropy Production and Fluctuation-ResponseNo ratings yetActive Brownian Particles: Entropy Production and Fluctuation-Response8 pages
- VERY VERY IM - The Pushing Force of A Propagating Electromagnetic WaveNo ratings yetVERY VERY IM - The Pushing Force of A Propagating Electromagnetic Wave8 pages
- Dynamics of Structures: Theory and Analysis: Finite Element Formulation For Bars, Beams EtcNo ratings yetDynamics of Structures: Theory and Analysis: Finite Element Formulation For Bars, Beams Etc26 pages
- Reduction of Finite Element Models of Complex Mechanical ComponentsNo ratings yetReduction of Finite Element Models of Complex Mechanical Components5 pages
- Electromagnetic Waves in Plasma PhysicsNo ratings yetElectromagnetic Waves in Plasma Physics18 pages
- Symmetries and The Cosmological Constant PuzzleNo ratings yetSymmetries and The Cosmological Constant Puzzle11 pages
- Travelling Wave Analysis and Jump Relations For Euler-Poisson Model in The Quasineutral LimitNo ratings yetTravelling Wave Analysis and Jump Relations For Euler-Poisson Model in The Quasineutral Limit34 pages
- Gauge Invariance in Classical ElectrodynamicsNo ratings yetGauge Invariance in Classical Electrodynamics22 pages
- Application of The Ritz Method To The Analysis of Non-Linear Free Vibrations of BeamsNo ratings yetApplication of The Ritz Method To The Analysis of Non-Linear Free Vibrations of Beams12 pages
- Alejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical ConductivityNo ratings yetAlejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical Conductivity8 pages
- Quantum Field Theory Notes: Ryan D. Reece November 27, 2007No ratings yetQuantum Field Theory Notes: Ryan D. Reece November 27, 200723 pages
- Recovering The Full Navier Stokes Equations With Lattice Boltzmann SchemesNo ratings yetRecovering The Full Navier Stokes Equations With Lattice Boltzmann Schemes9 pages
- Quantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. RinghoferNo ratings yetQuantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. Ringhofer34 pages
- COHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationNo ratings yetCOHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave Equation18 pages
- Two-Body Problems With Drag or Thrust: Qualitative ResultsNo ratings yetTwo-Body Problems With Drag or Thrust: Qualitative Results15 pages
- A. O. Barvinsky and A. Yu. Kamenshchik - Creation From Nothing Revisited: Landscape From Cosmological BootstrapNo ratings yetA. O. Barvinsky and A. Yu. Kamenshchik - Creation From Nothing Revisited: Landscape From Cosmological Bootstrap12 pages
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionD. ter Haar3/5 (2)
- New Fuzzy Integral Based On Gradual NumbersNo ratings yetNew Fuzzy Integral Based On Gradual Numbers9 pages
- The Role of The Ramanujan Conjecture in Analytic Number TheoryNo ratings yetThe Role of The Ramanujan Conjecture in Analytic Number Theory54 pages
- On The Limit Cycles For Lienard EquationNo ratings yetOn The Limit Cycles For Lienard Equation6 pages
- The Classification of Subfactors of Index at Most 5No ratings yetThe Classification of Subfactors of Index at Most 551 pages
- From Apollonius To Zaremba: Local-Global Phenomena in Thin OrbitsNo ratings yetFrom Apollonius To Zaremba: Local-Global Phenomena in Thin Orbits42 pages
- An Algebraic Exploration of Dominating Sets and Vizing's ConjectureNo ratings yetAn Algebraic Exploration of Dominating Sets and Vizing's Conjecture30 pages
- Fulton's Conjecture For : Paul L. LarsenNo ratings yetFulton's Conjecture For : Paul L. Larsen21 pages
- Acta Mathematica Academiae Paedagogicae Ny´ıregyh´ aziensis: 2πix 2πi (k+2) xNo ratings yetActa Mathematica Academiae Paedagogicae Ny´ıregyh´ aziensis: 2πix 2πi (k+2) x31 pages
- Equations, Expanding Brackets and FactorisationNo ratings yetEquations, Expanding Brackets and Factorisation15 pages
- Mr. Richard N. Romero: Cagayan National High School Tuguegarao CityNo ratings yetMr. Richard N. Romero: Cagayan National High School Tuguegarao City9 pages
- Calculus With Analytic Geometry I: (Derivative of A Function)No ratings yetCalculus With Analytic Geometry I: (Derivative of A Function)39 pages
- USA Aime 1983: Problems & Solutions: X y Xyz ZNo ratings yetUSA Aime 1983: Problems & Solutions: X y Xyz Z6 pages
- IGCSE Math_0580_Subject Contents (2025-2027)No ratings yetIGCSE Math_0580_Subject Contents (2025-2027)46 pages
- Introduction To Numerical Analysis II: Finite Element MethodNo ratings yetIntroduction To Numerical Analysis II: Finite Element Method16 pages
- MA202 Probability Distributions, Transforms and Numerical Methods, April 2018 PDFNo ratings yetMA202 Probability Distributions, Transforms and Numerical Methods, April 2018 PDF2 pages




































































































- Multiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of ElectronsMultiscale Splitting Method For The Boltzmann-Poisson Equation: Application To The Dynamics of Electrons
- P. C. Bressloff Et Al - Oscillatory Waves in Inhomogeneous Neural MediaP. C. Bressloff Et Al - Oscillatory Waves in Inhomogeneous Neural Media
- E Cient Solution of The SCHR Odinger-Poisson Equations in Semiconductor Device SimulationsE Cient Solution of The SCHR Odinger-Poisson Equations in Semiconductor Device Simulations
- Drift-Diffusion Model: Introduction: Dragica VasileskaDrift-Diffusion Model: Introduction: Dragica Vasileska
- Efficient Solution of Schrodinger Poisson Equation PDFEfficient Solution of Schrodinger Poisson Equation PDF
- Network Models of Quantum Percolation and Their Field-Theory RepresentationsNetwork Models of Quantum Percolation and Their Field-Theory Representations
- A No-Truncation Approach To Cosmic Microwave Background AnisotropiesA No-Truncation Approach To Cosmic Microwave Background Anisotropies
- Finite Volume Method For Transonic Potential Flow CalculationsFinite Volume Method For Transonic Potential Flow Calculations
- Properties of A Semi-Discrete Approximation To The Beam EquationProperties of A Semi-Discrete Approximation To The Beam Equation
- Single Particle Motion in E and B Fields: 1 ReviewSingle Particle Motion in E and B Fields: 1 Review
- V A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensateV A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein Condensate
- Feshbach Projection Formalism For Open Quantum SystemsFeshbach Projection Formalism For Open Quantum Systems
- Solving Linear Unbranched Pathways With Michaelis-Menten Kinetics Using The Lambert W-FunctionSolving Linear Unbranched Pathways With Michaelis-Menten Kinetics Using The Lambert W-Function
- Moving Boundary Problems For The BGK Model of Rarefied Gas DynamicsMoving Boundary Problems For The BGK Model of Rarefied Gas Dynamics
- Scale Relativity: From Quantum Mechanics To Chaotic DynamicsScale Relativity: From Quantum Mechanics To Chaotic Dynamics
- Fourier Approach of Electromagnetism With Hertz Potentials EPJDFourier Approach of Electromagnetism With Hertz Potentials EPJD
- A Parallelized Vlasov-Fokker-Planck-Solver For Desktop PCS: Patrik - Schoenfeldt@Kit - EduA Parallelized Vlasov-Fokker-Planck-Solver For Desktop PCS: Patrik - Schoenfeldt@Kit - Edu
- Active Brownian Particles: Entropy Production and Fluctuation-ResponseActive Brownian Particles: Entropy Production and Fluctuation-Response
- VERY VERY IM - The Pushing Force of A Propagating Electromagnetic WaveVERY VERY IM - The Pushing Force of A Propagating Electromagnetic Wave
- Dynamics of Structures: Theory and Analysis: Finite Element Formulation For Bars, Beams EtcDynamics of Structures: Theory and Analysis: Finite Element Formulation For Bars, Beams Etc
- Reduction of Finite Element Models of Complex Mechanical ComponentsReduction of Finite Element Models of Complex Mechanical Components
- Travelling Wave Analysis and Jump Relations For Euler-Poisson Model in The Quasineutral LimitTravelling Wave Analysis and Jump Relations For Euler-Poisson Model in The Quasineutral Limit
- Application of The Ritz Method To The Analysis of Non-Linear Free Vibrations of BeamsApplication of The Ritz Method To The Analysis of Non-Linear Free Vibrations of Beams
- Alejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical ConductivityAlejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical Conductivity
- Quantum Field Theory Notes: Ryan D. Reece November 27, 2007Quantum Field Theory Notes: Ryan D. Reece November 27, 2007
- Recovering The Full Navier Stokes Equations With Lattice Boltzmann SchemesRecovering The Full Navier Stokes Equations With Lattice Boltzmann Schemes
- Quantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. RinghoferQuantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. Ringhofer
- COHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationCOHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave Equation
- Two-Body Problems With Drag or Thrust: Qualitative ResultsTwo-Body Problems With Drag or Thrust: Qualitative Results
- A. O. Barvinsky and A. Yu. Kamenshchik - Creation From Nothing Revisited: Landscape From Cosmological BootstrapA. O. Barvinsky and A. Yu. Kamenshchik - Creation From Nothing Revisited: Landscape From Cosmological Bootstrap
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third Edition
- Solution of Certain Problems in Quantum MechanicsFrom EverandSolution of Certain Problems in Quantum Mechanics
- The Role of The Ramanujan Conjecture in Analytic Number TheoryThe Role of The Ramanujan Conjecture in Analytic Number Theory
- The Classification of Subfactors of Index at Most 5The Classification of Subfactors of Index at Most 5
- From Apollonius To Zaremba: Local-Global Phenomena in Thin OrbitsFrom Apollonius To Zaremba: Local-Global Phenomena in Thin Orbits
- An Algebraic Exploration of Dominating Sets and Vizing's ConjectureAn Algebraic Exploration of Dominating Sets and Vizing's Conjecture
- Acta Mathematica Academiae Paedagogicae Ny´ıregyh´ aziensis: 2πix 2πi (k+2) xActa Mathematica Academiae Paedagogicae Ny´ıregyh´ aziensis: 2πix 2πi (k+2) x
- Mr. Richard N. Romero: Cagayan National High School Tuguegarao CityMr. Richard N. Romero: Cagayan National High School Tuguegarao City
- Calculus With Analytic Geometry I: (Derivative of A Function)Calculus With Analytic Geometry I: (Derivative of A Function)
- Introduction To Numerical Analysis II: Finite Element MethodIntroduction To Numerical Analysis II: Finite Element Method
- MA202 Probability Distributions, Transforms and Numerical Methods, April 2018 PDFMA202 Probability Distributions, Transforms and Numerical Methods, April 2018 PDF