Arm Instruction Set
Arm Instruction Set
Download as pdf or txt
You might also like
- UI UX-TaskDocument1 pageUI UX-Taskspamalerts666No ratings yet
- IITK Malware Problem Final PDFDocument5 pagesIITK Malware Problem Final PDFshubhamNo ratings yet
- WorldView Band Combs 2Document6 pagesWorldView Band Combs 2hadipay2No ratings yet
- Guide To Bluetooth SecurityDocument43 pagesGuide To Bluetooth Securityapi-26626804No ratings yet
- 8051 Assembly LanguageDocument39 pages8051 Assembly LanguagemanvithbNo ratings yet
- Eee312 Eee282 Lab7 Spring2015Document6 pagesEee312 Eee282 Lab7 Spring2015vognarNo ratings yet
- Ultimate Ethical Hacking From Zero To HeroDocument2 pagesUltimate Ethical Hacking From Zero To Heroandres leonardo gomez murilloNo ratings yet
- ARM Assembly Language Guide: Common ARM Instructions (And Psuedo-Instructions)Document7 pagesARM Assembly Language Guide: Common ARM Instructions (And Psuedo-Instructions)M. Luthfi Alhadi ZNo ratings yet
- Python - Raspberry - Pi Quaculture PDFDocument40 pagesPython - Raspberry - Pi Quaculture PDFYeshwanth Krishna KolliNo ratings yet
- Android CarService - Android Carservice-CSDN Blog-Part1Document8 pagesAndroid CarService - Android Carservice-CSDN Blog-Part1Rached MairchiNo ratings yet
- Hindi To French AnkurDocument6 pagesHindi To French AnkurBalpreet KaurNo ratings yet
- Macos Vulnerabilities Hiding in Plain Sight: Cve-2022-Xxxx - Disk Arbitration - Sandbox BypassDocument22 pagesMacos Vulnerabilities Hiding in Plain Sight: Cve-2022-Xxxx - Disk Arbitration - Sandbox BypassOliver HidalgoNo ratings yet
- Android SpinnerDocument9 pagesAndroid SpinnerFrancisco FeitosaNo ratings yet
- Unit IV Ai Kcs071Document41 pagesUnit IV Ai Kcs071ekagraNo ratings yet
- Satellite and Land Cover Image Classification Using Deep LearningDocument5 pagesSatellite and Land Cover Image Classification Using Deep LearningEditor IJTSRDNo ratings yet
- Reading Rotary Encoder On Arduino Circuits@HomeDocument17 pagesReading Rotary Encoder On Arduino Circuits@Homesukaryadi1100% (1)
- EssaysDocument2 pagesEssaysDylan Haugh-EwaldNo ratings yet
- Assembly Language Notes v2Document3 pagesAssembly Language Notes v2maiyonisNo ratings yet
- Arduino Rotary Encoder Menu - Educ8s.tv - Watch Learn BuildDocument17 pagesArduino Rotary Encoder Menu - Educ8s.tv - Watch Learn BuildSinan YıldızNo ratings yet
- Java Lab ManualDocument69 pagesJava Lab ManualSrinivasarao GuddantiNo ratings yet
- Research & Simulation - Network Simulations and Installation of NS2 and NS3Document2 pagesResearch & Simulation - Network Simulations and Installation of NS2 and NS3deepakk_alpineNo ratings yet
- Machine Learning For BeginnersDocument16 pagesMachine Learning For BeginnerskhaabaNo ratings yet
- 1884 Unit - I Lecturer NotesDocument51 pages1884 Unit - I Lecturer NotesSelvan Dinesh Kumar100% (1)
- Introduction To RoboticDocument51 pagesIntroduction To RoboticMASOUDNo ratings yet
- Ethnobotanical Studies of Reputed Aphrodisiac Plants Used in Traditional Medicine in Haut-Katanga in DR of CongoDocument18 pagesEthnobotanical Studies of Reputed Aphrodisiac Plants Used in Traditional Medicine in Haut-Katanga in DR of CongoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Sparse ClassDocument23 pagesSparse ClassrobinptNo ratings yet
- Department of Computing Adama Science and Technology UniversityDocument56 pagesDepartment of Computing Adama Science and Technology Universitybirhanu berihunNo ratings yet
- Bluetooth SecurityDocument34 pagesBluetooth SecurityGanesh KwaradiNo ratings yet
- Invehicular Communication Using Vector CANoeDocument16 pagesInvehicular Communication Using Vector CANoesravan BattulaNo ratings yet
- A Hybrid Approach To Amharic Base Phrase Chunking and ParsingDocument103 pagesA Hybrid Approach To Amharic Base Phrase Chunking and Parsingእያኝ አፊጥጠህNo ratings yet
- Coding AssignmentDocument5 pagesCoding Assignmentanshul goyalNo ratings yet
- 803 (A) Image Processing and Computer Vision#: Subject In-Charge: Prof Shilpa SharmaDocument44 pages803 (A) Image Processing and Computer Vision#: Subject In-Charge: Prof Shilpa SharmaShilpa SharmaNo ratings yet
- Deep LearningDocument34 pagesDeep LearningSumaira Majeed 09No ratings yet
- Digital Control SystemDocument34 pagesDigital Control SystemLaxman Koirala100% (3)
- High and Low Level LanguagesDocument5 pagesHigh and Low Level LanguagesAhmed HassanNo ratings yet
- This Study Resource Was: Attempt All QuestionsDocument5 pagesThis Study Resource Was: Attempt All Questionsawaix ashfaqNo ratings yet
- Speech Emotion Detection (CNN Algorithm)Document29 pagesSpeech Emotion Detection (CNN Algorithm)narendra rahmanNo ratings yet
- ANSYS 7.0 CAD Geometry Connections, Geometry Plugins, and Geometry ReadersDocument6 pagesANSYS 7.0 CAD Geometry Connections, Geometry Plugins, and Geometry ReadersAdamDNo ratings yet
- Lab Work File: 5 Semester ECE (2017 Batch)Document24 pagesLab Work File: 5 Semester ECE (2017 Batch)DeepakNo ratings yet
- Oracle Database 12c Development GuideDocument714 pagesOracle Database 12c Development GuideBupBeChanhNo ratings yet
- Unwired Learning: The Ultimate Python Developer BundleDocument19 pagesUnwired Learning: The Ultimate Python Developer BundleNnnnngdggNo ratings yet
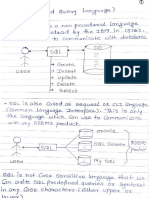
- S0L Cstucturcd Oue Languoge)Document9 pagesS0L Cstucturcd Oue Languoge)Alok kumarNo ratings yet
- Elective Paper V &vi - Ug UpdatedDocument19 pagesElective Paper V &vi - Ug UpdatedPushpavalli MohanNo ratings yet
- Intelligent AgentDocument60 pagesIntelligent AgentMuhd SolihinNo ratings yet
- System MontoringDocument31 pagesSystem MontoringPheletso RigdwayNo ratings yet
- 100 Python Tips Tricks 1704521617Document122 pages100 Python Tips Tricks 1704521617Ricardo GrimaldiNo ratings yet
- Usb 2.oDocument44 pagesUsb 2.oRADHA KRISHNANo ratings yet
- How To Manipulate CNNs To Make Them Lie: The GradCAM Case (Slides)Document23 pagesHow To Manipulate CNNs To Make Them Lie: The GradCAM Case (Slides)Tom VieringNo ratings yet
- Campus X NLP Lecture 1Document2 pagesCampus X NLP Lecture 1Depepanshu MahajanNo ratings yet
- Dapoxetine For The Management of Premature EjaculationDocument5 pagesDapoxetine For The Management of Premature EjaculationMohammad Mesbaul HaqueNo ratings yet
- Computer AbrevationsDocument19 pagesComputer AbrevationsmuralisujiNo ratings yet
- Protein MemoryDocument29 pagesProtein MemorySiddhant Singh KanawatNo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 8 (30-10-2020)Document14 pagesOIE 751 ROBOTICS Unit 3 Class 8 (30-10-2020)MICHEL RAJNo ratings yet
- Inspiration From Neurobiology: Human Biological NeuronDocument47 pagesInspiration From Neurobiology: Human Biological NeuronLalitaditya DivakarlaNo ratings yet
- Operating System Lab Manual 19 20Document97 pagesOperating System Lab Manual 19 20A-1 Abhishek NiwalkarNo ratings yet
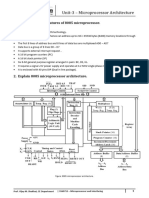
- MP Lab ManualDocument67 pagesMP Lab ManualSahil PatelNo ratings yet
- LMNs - Algorithms - GeeksforGeeksDocument6 pagesLMNs - Algorithms - GeeksforGeeksAnchal RajpalNo ratings yet
- DeadlockDocument41 pagesDeadlockapi-26557430No ratings yet
- Lecture 2 - ARM Instruction SetDocument42 pagesLecture 2 - ARM Instruction SetSuhaib AbugderaNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Cadence Software Detail University SelectionDocument7 pagesCadence Software Detail University Selectionvenktesh22No ratings yet
- Intro To Computer AssignmentDocument5 pagesIntro To Computer AssignmentRizwan KhokharNo ratings yet
- 9998598840microprocessor LabDocument48 pages9998598840microprocessor LabAyesha SidiqaNo ratings yet
- How To Using TeraTermDocument4 pagesHow To Using TeraTermMirul AkiaNo ratings yet
- CPLD and VerilogDocument19 pagesCPLD and VerilogSuraj Goel100% (1)
- Make Your Own Cheap USB MIDI Controller or Keyboard - 4 StepsDocument1 pageMake Your Own Cheap USB MIDI Controller or Keyboard - 4 Stepspepe sanchezNo ratings yet
- PC4300 DDR II RAM (DDR-533) : Model Size 2 Dimms 4 Dimms R.S.TDocument9 pagesPC4300 DDR II RAM (DDR-533) : Model Size 2 Dimms 4 Dimms R.S.TRafael Villamizar RinconNo ratings yet
- Microelectronic Circuits, 8e Sedra, Smith, Carusone, GaudetDocument2 pagesMicroelectronic Circuits, 8e Sedra, Smith, Carusone, GaudetBobNo ratings yet
- Introduction To ComputersDocument13 pagesIntroduction To ComputersHira IrfanNo ratings yet
- Memory Segmentation 8086Document3 pagesMemory Segmentation 8086Aniket JamwalNo ratings yet
- Netapp Disk Shelves and Storage Media: SystemsDocument4 pagesNetapp Disk Shelves and Storage Media: Systemsarif_rustamNo ratings yet
- MPI GTU Study Material E-Notes Unit-3 13052022115048AMDocument15 pagesMPI GTU Study Material E-Notes Unit-3 13052022115048AMmailsender787No ratings yet
- Sitronix ST7567Document73 pagesSitronix ST7567Fai tHNo ratings yet
- Dell Quanta Gm3 (B)Document63 pagesDell Quanta Gm3 (B)Ariox VitriolNo ratings yet
- Sllimm - 2 Series IPM, 3-Phase Inverter, 12 A, 600 V Short-Circuit Rugged IGBTDocument23 pagesSllimm - 2 Series IPM, 3-Phase Inverter, 12 A, 600 V Short-Circuit Rugged IGBTtadiganeshNo ratings yet
- UM1724 User ManualDocument69 pagesUM1724 User ManualdavidNo ratings yet
- LPC11U6XDocument96 pagesLPC11U6XLê Hoàng DuyNo ratings yet
- TA0045 4 Channel Relay ModuleDocument3 pagesTA0045 4 Channel Relay ModuleIce brandNo ratings yet
- Replacing A Controller Module in A 32xx DataDocument31 pagesReplacing A Controller Module in A 32xx DataPurushothama GnNo ratings yet
- Ebin - Pub Digital Principles and Circuits 1nbsped 9789350433195 9788183184861Document468 pagesEbin - Pub Digital Principles and Circuits 1nbsped 9789350433195 9788183184861vowan44398100% (1)
- EE602-N Microcontroller & Their ApplicationsDocument3 pagesEE602-N Microcontroller & Their ApplicationsJohn sonNo ratings yet
- En DM00108832Document232 pagesEn DM00108832svm86No ratings yet
- Embedded Controller Data SheetDocument2 pagesEmbedded Controller Data SheetRichard MachadoNo ratings yet
- Debug 1214Document3 pagesDebug 1214rantosbNo ratings yet
- Module 4 Extra Problems On CacheDocument43 pagesModule 4 Extra Problems On CacheLalala LandNo ratings yet
- Traffic Density Control ReportDocument44 pagesTraffic Density Control ReportSanjana SinghNo ratings yet
- Project Report VHDLDocument68 pagesProject Report VHDLricha_shukla_40No ratings yet
- OUR Presentation Is On Storage Devices and MemoryDocument27 pagesOUR Presentation Is On Storage Devices and MemoryRiameen Shah100% (2)
- Combinational Circuit Analysis and DesignDocument25 pagesCombinational Circuit Analysis and DesignPECMURUGANNo ratings yet
- Learning MapsDocument15 pagesLearning MapsHuanyu ChenNo ratings yet