AUTOSAR 3.2 Based Protocol Data Unit Router Module
AUTOSAR 3.2 Based Protocol Data Unit Router Module
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 3
ISSN: 2321-8169
1255 1260
_______________________________________________________________________________________________
AUTOSAR 3.2 based Protocol Data Unit Router Module
Shilpa Das
Department of ECE
Vidya Academy of Science and Technology, Technical Campus
Trivandrum, India
e-mail: shilpagiresh@gmail.com
Abstract Automotive Open System Architecture (AUTOSAR) is the new standard software architecture for automobiles. The increased usage
of Electronic Control Units (ECU) in automobiles is contributing to higher software complexity in vehicles. Here is the significance of
AUTOSAR. The AUTOSAR is a new framework used to reduce the ECU complexity in new generation automobiles. Its core frame work
consists of four layers; the top layer is the Application layer and the bottom layer is the Microcontroller layer. Run Time Environment and Basic
Software Layer are the two layers sandwiched between these two layers. The Basic Software Layer provides an infrastructural functionality to an
ECU. The scope of this paper is limited to a module within the Basic Software Layer named Protocol Data Unit (PDU) Router module. PDU
Router module must be instantiated in every ECU. The main task of this module is the routing of Interaction Layer Protocol Data Units (I-PDUs)
between the communication services and the hardware abstraction layer modules. It also provides the gateway functionality whi ch means the
routing of I-PDUs between the same or different networks. This paper focuses the design, development and testing of AUTOSAR 3.2 based
PDU Router module.
Keywords- AUTOSAR, ECU, PDU Router, I-PDU
__________________________________________________*****_________________________________________________
I.
INTRODUCTION
The use of embedded software in automotive industry is
growing by each day. In an automotive vehicle of modern
day, most of the functionalities such as air conditioning,
engine management, antilock braking system etc. are under
computer control.
So, off late, modern vehicles are characterized by the
presence of high number of ECUs (Electronic Control
Units). Luxury cars can easily have up to 70 ECUs. The
high number of ECUs will increase the software complexity
of the vehicles. In order to handle this enormous complexity
in automotive software systems, a new innovative standard
was introduced called AUTOSAR (AUTomotive Open
System Architecture). AUTOSAR was founded as a
development partnership in 2003 by a group of companies.
AUTOSAR is a standardized architecture for Electric and
Electronic (E&E) systems. The re-use of software
components between different vehicle platforms, like OEMs
(Original Equipment Manufacturer) is one of the major
goals of AUTOSAR [1]. There are a number of technical
factors that have motivated the development of AUTOSAR.
The most significant of those are listed below:
Improving scalability
Improving quality and reliability
Improving flexibility
Enabling the early detection of errors during
project's design phase.
Consideration of availability and safety
requirements
Software updates and upgrades over vehicle life
time
Redundancy activation
Reduction of costs for software development and
service in the long term [2].
AUTOSAR supports the modular development of ECU
software. The functions inside the ECU network are easier
to integrate and replace. It helps the vehicle manufactures to
be more flexible in the use of ECU software [8].
II.
SOFTWARE ARCHITECTURE
The AUTOSAR software architecture is a layered
architecture. That has the goal to abstract the software from
hardware components [3]. The software architecture of
AUTOSAR shown in figure 1 consists of four main layers.
The lowermost layer is the microcontroller layer which
contains the ECU hardware. The next two layers above the
microcontroller layer are Basic Software and the Run Time
Environment layer. The uppermost layer is the application
layer; which contains all the application specific hardware
components [4].
The layers in the AUTOSAR have different
functionalities. The Basic Software and the Run Time
Environment layers are responsible for the abstraction
between the hardware and the application software. The
Basic Software is the standardized software; providing
necessary services for running the functional part of the
software. The Run Time Environment layer connects the
basic software with the application software. It enables inter
component communication as well as communication from
software components to basic software modules.
The Basic Software layer includes three layers called the
Service layer, the ECU abstraction layer and the
microcontroller layer. It may also contain the Complex
Device Driver. It breaks the layered architecture where the
direct access of hardware is needed.
The MCAL (Microcontroller Abstraction Layer) is the
abstraction of the hardware; to avoid the direct access of
microcontroller's register. Abstraction layer provides
software interface to a specific ECU. Service layer is the
highest layer of the Basic Software and it provides basic
1255
IJRITCC | March 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 3
ISSN: 2321-8169
1255 1260
_______________________________________________________________________________________________
Figure 1. AUTOSAR software architecture layers [4].
services to the application layer, the basic services includes
memory services, diagnostic services, communication
services, system services etc. [3]. Protocol Data Unit (PDU)
Router module is a part of AUTOSAR service layer. PDU
Router module provides communication services to other
modules [6].
The Operating System of AUTOSAR is based on
standard OSEK based operating system. This operating
system is widely used by the automotive industry.
AUTOSAR OS supports fixed priority based scheduling,
facilities for handling interrupts and it also provides inter
task communication [5].
III.
PROTOCOL DATA UNIT ROUTER MODULE
PDU is an abbreviation of Protocol Data Unit. Each PDU
contains an SDU and a PCI. SDU is Service Data Unit
which is the data passed by an upper layer with the request
to transmit the data. PCI is an abbreviation of Protocol
Control Information; it contains the source and target
information. It is added on transmission side and removed
on receiving side.
The signals from the AUTOSAR application layer come
to the RTE layer; the RTE performs the transformation from
the AUTOSAR signal to the signal in COM. AUTOSAR
signals are packed and unpacked by using the COM module.
The signals are packed into I-PDUs. I-PDU group is a
collection of I-PDUs in COM and contains more I-PDUs
[1].
The PDU Router module is an important part of
AUTOSAR ECU. The main task of Protocol Data Unit
Router module is to route the I-PDUs (Interaction Layer
Protocol Data Units) between:
Communication interface modules such as
LINIF,CANIF and FlexRayIf
Transport protocol modules such as CAN
TP,FlexRay TP
AUTOSAR Diagnostic Communication Manager
(DCM) and Transport Protocol modules such as
CAN TP, FlexRay TP
AUTOSAR COM and communication interface
modules such as LINIF, CANIF or FlexRayIf or IPDU multiplexer.
I-PDU multiplexer and communication interface
modules such as LINIF, CANIF or FlexRayIf.
PDU Router module can be adapted for gateway
operations and for internal routing purposes. It transfers IPDUs from one module to another module [6].
Each PDU has a static PDU ID; which is used to identify
the PDUs. Each PDU Router module finds out the
destination path by using the static configuration table and
the PDU ID. I-PDUs has a maximum length of 8 bytes.
PDU Router module provides APIs for modules below
and above the PDU Router. The modules below the PDU
Router module are communication interface modules and
the transport protocol modules. The modules above the PDU
Router module are COM and DCM (Diagnostic
Communication Manager). More over PDU Router module
provides an interface to I-PDU Multiplexer (I-PduM) which
is a module that is beside the PDU Router.
The PDU Router module consists of PDU Router routing
tables and the PDU routing engine. The PDU routing tables
can be updated during the post build time in the
programming state of the ECU, and it describes the routing
attributes for each PDU shall be routed. PDU routing engine
describes the actual code performing the routing actions is
based on the PDU Router routing tables. The detailed PDU
structure is shown in figure 3.
The PDU Router engine provides a minimum routing
capability to route specific PDUs without using the routing
tables. This supports accessing of the DCM for activation of
the ECU boot loader even when the post build time routing
table is modified.
Figure 2. AUTOSAR Communication structure [6]
1256
IJRITCC | March 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 3
ISSN: 2321-8169
1255 1260
_______________________________________________________________________________________________
After power up the PDU Router module shall be in the state
PDUR_UNINIT. The PDU Router module shall change to
the state PDUR_ONLINE, when the PDU Router has
successfully initialized via the function PduR_Init. If the
initialization did not succeed the PDU Router module shall
change the state to PDUR_REDUCED.PDU Router states is
shown in figure 4.
PDU Router module shall perform routing when it is in
online state (PDUR_ONLINE), PDU Router shall perform
minimum routing and routing when it is in the reduced state
(PDUR_REDUCED) and the PDUR shall perform no
routing when it is in the uninitialized state
(PDUR_UNINIT) [6].
Figure 3. The detailed PDU structure [6]
A.
Functional Specification of PDU Router
The PDU Router module can perform three different
classes of operations. They are PDU reception, receive the IPDU and send to the upper layer, PDU transmission;
transmit I-PDUs on request of upper layer modules and
PDU gateway, receive the I-PDU from an lower layer
module and transmit this I-PDUs to the same or another
lower layer module [1].
The PDU Router module will refresh the routing tables
only when they are not in use. The behavior of PDU Router
module functions should be synchronous; although the
overall action of a function might be asynchronous.
The PDU Router module provides a special type of
gateway functionality known as routing-on-the-fly, which
means that the forwarding of data between two
communication modules is started before all data have been
received.
PDU Router module transfers the I-PDU to one
destination module (single cast transmission) or more than
one destination modules (multicast transmission).The
modules above the PDU Router module such as COM and
DCM, can request the cancellation of an I-PDU transmitted
from the lower layer modules, if that I-PDU is not needed ,it
can be done by using the API PduR_<Lo>CancelTransmit.
Cancellation of an I-PDU will only be confirmed by the
destination protocol module. Like cancel transmission the
modules can request for cancel reception also, for example
if the upper layer module want to cancel the reception of IPDUs from the lower layer modules then the upper layer
modules will use the API PduR_<Up>CancelReceive..
It is also possible for the upper layer modules can change
the transport protocol parameters for a definite Rx IPDU.For this upper layer modules call the API
PduR_<Up>ChangeParameter [6].
B. PDU Router State Management
The PDU Router module consists of three states. They are
PDUR_UNINIT, PDUR_REDUCED, and PDUR_ONLINE.
C. API Specification of PDU Router module
In order to initialize the PDU Router module PduR_Init
API is used. If this API is successfully initialized then the
PDU Router module shall go to the state PDUR_ONLINE.A
set of routing paths can be enabled and disabled by using the
APIs PduR_EnableRouting and PduR_DisableRouting
respectively [6].
D. Functional Definitions for lower layer modules
The modules below the PDU Router modules are
CAN,LIN, and FlexRay.Lower interface layer modules calls
the function PduR_<Lo>IfRxIndiaction, after an L-PDU has
been received. L-PDU is a Data Link Layer Protocol Data
Unit which is assembled or disassembled in AUTOSAR
hardware abstraction layer. In AUTOSAR; Data Link layer
is correspondent to the Microcontroller Abstraction Layer.
The maximum length of CAN and LIN L-PDU is 8 bytes
and the maximum length for FlexRay L-PDU is 254 bytes.
Figure 4. PDUR States
1257
IJRITCC | March 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 3
ISSN: 2321-8169
1255 1260
_______________________________________________________________________________________________
PduR_<Lo>IfTxConfirmation and
PduR_<Lo>TpTxConfirmation functions are called by the
lower layer interface and Transport protocol modules after
the
PDU
has
been
transmitted.
PduR_<Lo>TpProvideTxBuffer , API is used to provide the
Tx buffer for the lower layer modules.
NM (Network Management) interface is a new added
feature of AUTOSAR 3.2 version. NM module shall act as a
bus independent adaptation layer between the bus specific
Network Management modules such as CanNm and FrNm.
PduR_<Can,Fr>NmRxIndication is used, after an L-PDU
has been received. PduR_<Can,Fr>NmTxConfirmation is
called after the PDU has been transmitted. In order to trigger
the
transmission
of
an
NM
message
PduR_<Can,Fr>NmTriggerTransmit API is used.
E. Functional Definitions for Upper layer modules
The modules above the PDU Router modules are COM
and DCM. PduR_<Up>Transmit is called by the upper layer
modules to request transmission .PduR_DcmCancelReceive
API is used to terminate the currently ongoing data
reception. PduR_DcmCancelTransmit is used to terminate
the currently ongoing TP data transmission. PDUR shall
provide a communication interface API for the CDD.
PduR_CddTransmit is called by complex device driver to
request a transmission. PduR_CddTpTransmit is called by
an upper layer Cdd to request transmission using a transport
protocol.
The IpduM (I-PDU Multiplexer) is placed next to the
PDU Router module.
PduR_IpduMTransmit requests
the transmission for the IpduM. IpduM module is acting as
an lower layer module. PduR_IpduMTriggerTransmit is
called by the IpduM to request I-PDU contents from upper
layer module [6].
IV.
DESIGN OF PDU ROUTER MODULE
Design of PDU Router module consists, of both High
Level Design (HLD) and Low Level Design (LLD).HLD
specifies, the identification of APIs needed for the
implementation of PDUR and the LLD point out the detailed
design of APIs.
Figure 5 shows the Low Level Design of
PduR_DcmCancelReceive. This function is called by DCM
to request a transmission. High level and low level design
was done by using Enterprise Architect version 7.5
software.
Figure 5. Low Level Design of PduR_DcmCancelReceive
1258
IJRITCC | March 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 3
ISSN: 2321-8169
1255 1260
_______________________________________________________________________________________________
V.
CONFIGURATION
Configuration parameters for the coding were obtained
form eZyConfig. This tool was developed by Tata Elxsi
Limited. This tool is used for generating the configuration
codes for BSW modules. The code file structure of the PDU
Router module shall include the following files;PduR_Cfg.c
PduR_Lcfg.c and PduR_PBcfg.c.This files represents the
pre compile time ,link time and the post build time
configuration parameters [7].
VI.
DEVELOPMENT AND TESTING OF PDUR MODULE
The development of PDU Router module was done by
implementing all the APIs intended for it. The file structure
of the PDU Router module consists of all the header files
and the code files. Coding was done in C and by using
Microsoft Visual C++ 2008 express edition. It is
successfully compiled and builds without error.
Testing of PDU Router module consist of Unit testing and
Integration testing. Unit testing refers to the process of
testing modules against the detailed design. Integration
testing mainly deals with testing for the correctness of the
interface. Test Systems 2.3 (TESSY) is used for unit testing
of PDU Router. Validation platform used for integration
testing is MPC5668G, a 32 bit MCU built in dual core
power architecture technology.
Test report will be generated in XML or HTML format.
Figure 6 shows the Batch Test Report in Tessy.
A. Integration Testing Result
The hardware setup consist of Evaluation board (MPC
5668G), CANoe tool, CANCaseXL, CANcardXL,
Lauterbach debugger,PC etc. The PC will act as one CAN
node and board will act as another CAN node. Only 3 CAN
channels of the target board is used for testing. PC is
connected to the board through CANCaseXL and
CANCardXL. The transmitted and received messages can
be viewed in Trace window of CANoe. Four messages are
selected for integration testing. They are:
BDY152HA Message to COM
BDY660HA -Message to COM & Gateway
DNT7E7HA Message to DCM
DNT7DFHA -Message to DCM & Gateway
Figure 7 shows the layout of BDY152HA. This is a 8 byte
message, which is transmitted to COM.
VII. RESULTS
In order to test and verify PDU Router module unit
testing, Batch testing, and integration testing were done.
A. Tessy Testing Result
After executing the test in Tessy ,if the expected and the
actual values are same the test case will pass by indicating it
in green colour.
Figure 7. Layout of BDY152HA
Figure 8. Snap shot of Messages in Trace Window
Figure 6. Batch Test Report inTessy
1259
IJRITCC | March 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 3 Issue: 3
ISSN: 2321-8169
1255 1260
_______________________________________________________________________________________________
The transmission of message from PC to board, reception
of message from board to PC and gateway of message from
one CAN channel to other is successfully tested. The
transmitted and received messages can be viewed in Trace
window of CANoe. Fig8 shows the snap shot of messages in
Trace window.
VIII. CONCLUSION
This work has resulted in a working AUTOSAR PDU
Router module. This was achieved by analyzing the
requirements and preparing the high level design. Based on
the high level design, low level design was done by drawing
flow charts for all APIs. After the design, coding was done
by using Visual C++, the correctness of the APIs was tested
in unit level and integration level using the tool Tessy. Batch
test report is generated using the Tessy software. Integration
Testing was done on MPC5668G Evaluation Board.
Messages were successfully transmitted and received in the
integration testing by using the MPC5668G Evaluation
Board and CANoe tool.
Believed that with the constant improvement of
AUTOSAR, the PDU Router module as an important part of
AUTOSAR, will play an increasingly important role in the
development of automotive electronics industry. With the
increasing demands for a safe and convenient car, the
complexity of automotive ECU is constantly increasing.
AUTOSAR enables the development of sophisticated ECU
software with high quality and efficiency. In the future,
AUTOSAR can be widespread to deal with the currently
faced challenges, such as reducing time to market, managing
the complexities, improving efficiencies, and so on.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
Gosda,Johannes.AUTOSAR Communication Stack .Technical
report,Hasso-Plattner Institute fur Softwaresystemtechnik ;pp.1323;2009
AUTOSAR
Partnership,AUTOSAR_Technical
Overview
V2.2.2R3.2Rev1.
[Online].Available.http://www.autosar.org/download/R3.2/AUTOSA
R TechnicalOverview.pdf 2011
Warschofsky, Robert,AUTOSAR Software Architecture,Technical
report,Hasso-Plattner Institute fur Softwaresystemtechnik ;2009
Schreiner
Dietmar
Component
based
middleware
for
AUTOSARMaster's Thesis,Vienna University of Technology,pp.4245,2009
Leppla,GarethMapping Requirements to AUTOSAR software
components;Master's Thesis;Waterford Institute of Technology
Awards Council;pp.51-58;June 2008
AUTOSAR GbR:Specification of PDU RouterV2.4.0R3.2Rev1
[Online]Available:http://www.autosar.org/download/R3.2/AUTOSAR
_ SWS_PDU_Router.pdf 2011
eZyConfig manual,Tata Elxsi Limited,November 2009
Han Wu;Vehicle Diagnostic with AUTOSARMaster's Thesis;KTH
Computer Science and Communication ;pp.11-14;2008
1260
IJRITCC | March 2015, Available @ http://www.ijritcc.org
_______________________________________________________________________________________
You might also like
- 5LQDocument2 pages5LQJacob Gortat0% (2)
- Case Study: Dividends-Based Valuation of Starbucks' Common EquityDocument9 pagesCase Study: Dividends-Based Valuation of Starbucks' Common EquityNAM Dang Phuong0% (1)
- DEFT Zero - Quick Guide v0.11 (ENG)Document5 pagesDEFT Zero - Quick Guide v0.11 (ENG)virginiarappeNo ratings yet
- Part 1 Of: Powershell: Nisarg Alpesh Patel149421208 Napatel43Document4 pagesPart 1 Of: Powershell: Nisarg Alpesh Patel149421208 Napatel43Nisarg PatelNo ratings yet
- Stub Axle Design Stub Axle Design Stub Axle Design Stub Axle DesignDocument1 pageStub Axle Design Stub Axle Design Stub Axle Design Stub Axle DesignNano NanoNo ratings yet
- CSG1207D Assignment Task 1 - Flights - Tri 1 2021 - ACBTDocument4 pagesCSG1207D Assignment Task 1 - Flights - Tri 1 2021 - ACBTVenul Kithnuka Ekanayake Walawwe Mahakumarage100% (1)
- Automated Vehicular Identification and Authentication SystemDocument4 pagesAutomated Vehicular Identification and Authentication SystemInternational Journal of Innovations in Engineering and Technology (IJIET)No ratings yet
- T.MSD309.8B: Service ManualDocument16 pagesT.MSD309.8B: Service ManualmirelaNo ratings yet
- Cisco 2 Chapter 11 Study GuideDocument7 pagesCisco 2 Chapter 11 Study GuideGreg MillerNo ratings yet
- Voltas & Wipro WordDocument11 pagesVoltas & Wipro WordFaheem YakubNo ratings yet
- IO ControllersDocument7 pagesIO ControllersPuneet PatilNo ratings yet
- Practice Final ExamDocument3 pagesPractice Final ExamThành ThảoNo ratings yet
- Ford and World Automobile IndustryDocument6 pagesFord and World Automobile IndustrySahoo SK100% (1)
- Semester Project: COMSATS University Islamabad, Virtual Campus HUM102 Report Writing Skills Assignment # 03 Spring 2020Document4 pagesSemester Project: COMSATS University Islamabad, Virtual Campus HUM102 Report Writing Skills Assignment # 03 Spring 2020UzairNo ratings yet
- SOP For Connecting FTP ServerDocument3 pagesSOP For Connecting FTP ServerShashiRekhaNo ratings yet
- Startex Case 4Document9 pagesStartex Case 4Nguyen RichardNo ratings yet
- App Dev Case Study PG1Document9 pagesApp Dev Case Study PG1suryagupta5No ratings yet
- Cytegic - ACRO DatasheetDocument2 pagesCytegic - ACRO DatasheetLouisNo ratings yet
- User Manual For Online Super Market WebsiteDocument3 pagesUser Manual For Online Super Market WebsiteTharunNo ratings yet
- Itecompsysl Activity 1 ReportDocument8 pagesItecompsysl Activity 1 ReportKirby HelmuthNo ratings yet
- Nus 10 High Voltage Ac Power 2Document63 pagesNus 10 High Voltage Ac Power 2schaefer1015719No ratings yet
- Coursera Week-5Document3 pagesCoursera Week-5Go StargNo ratings yet
- LTE MO CommandsDocument41 pagesLTE MO CommandsRohit Singh Tomar78% (9)
- Mangaung IPTN 2016-2020Document73 pagesMangaung IPTN 2016-2020Ntate MoloiNo ratings yet
- JIT in MalaysiaDocument10 pagesJIT in MalaysiaRaja AinNo ratings yet
- PDocument2 pagesPrajpd28No ratings yet
- Instruction Vertyanov JIG Ver3Document26 pagesInstruction Vertyanov JIG Ver3guvenelktNo ratings yet
- EE314 Lab 1 FinalDocument19 pagesEE314 Lab 1 FinalCarlos BabuNo ratings yet
- Mini ProjectDocument4 pagesMini ProjectshabbupathanNo ratings yet
- Abdul Muaaz Fa16-BSE-182-C Muhammad Zeeshan Fa16-BSE-090-C Ahsan Riaz Fa16-BSE-012-CDocument7 pagesAbdul Muaaz Fa16-BSE-182-C Muhammad Zeeshan Fa16-BSE-090-C Ahsan Riaz Fa16-BSE-012-CAbdul MuaazNo ratings yet
- Software Test Design SpecificationDocument17 pagesSoftware Test Design SpecificationIoana Augusta PopNo ratings yet
- Installation Manual VS111 Series: Plug-In Amplifier For Proportional ValvesDocument7 pagesInstallation Manual VS111 Series: Plug-In Amplifier For Proportional Valvesmehdi810No ratings yet
- PHP Assignment 1Document2 pagesPHP Assignment 1Raunaq100% (1)
- Corum8 Proposal1.10 PDFDocument57 pagesCorum8 Proposal1.10 PDFNeha SoniNo ratings yet
- Scaling Sludge Mountains: Breaking Down Barriers For Chinese Cities To Turn Sludge Waste Into EnergyDocument44 pagesScaling Sludge Mountains: Breaking Down Barriers For Chinese Cities To Turn Sludge Waste Into EnergyThe Wilson CenterNo ratings yet
- DWD316 2820525026Document72 pagesDWD316 2820525026Suzette Feneysey100% (3)
- Synopsis On SRS DocumentDocument10 pagesSynopsis On SRS DocumentGoldi SinghNo ratings yet
- Amway 7 FullDocument2 pagesAmway 7 Fullmandloij0% (1)
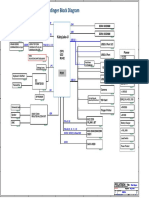
- Erdinger Block Diagram: Kabylake-UDocument94 pagesErdinger Block Diagram: Kabylake-UEduinMaracuchoFernandezChaparroNo ratings yet
- Group 5 BNM & AmlaDocument32 pagesGroup 5 BNM & AmlaSitiSarahNo ratings yet
- Automation System & Ac KioskDocument34 pagesAutomation System & Ac Kiosksadfs232No ratings yet
- Panduan InstalasiDocument14 pagesPanduan InstalasiToni SubagyoNo ratings yet
- DB211 - Unit 9 Assignment ADocument3 pagesDB211 - Unit 9 Assignment ATim WilliamsNo ratings yet
- RNC Node Redundancy (RAN15.0 - 01)Document35 pagesRNC Node Redundancy (RAN15.0 - 01)hekriNo ratings yet
- Flowmster SDK HelpDocument2 pagesFlowmster SDK HelphjxyNo ratings yet
- Prepared by Dr.M.R.Srinivasan, TNAU, Coimbatore: ANOVA For Completely Randomised Design (CRD)Document19 pagesPrepared by Dr.M.R.Srinivasan, TNAU, Coimbatore: ANOVA For Completely Randomised Design (CRD)Rahul NashipudiNo ratings yet
- 05-06-2020-1591344288-7-Ijbgm-2. Ijbgm - The Significance of Web-Based Revalidation Support For The Seaborne Trade and Autonomous TechnologyDocument10 pages05-06-2020-1591344288-7-Ijbgm-2. Ijbgm - The Significance of Web-Based Revalidation Support For The Seaborne Trade and Autonomous Technologyiaset123No ratings yet
- Employee Pension Scheme Form 10 C PDFDocument1 pageEmployee Pension Scheme Form 10 C PDFSuraj BaugNo ratings yet
- Notes On Solid State InterlockingDocument58 pagesNotes On Solid State InterlockingElton RibeiroNo ratings yet
- Dynamic PumpsDocument7 pagesDynamic PumpsBAZIL KHANNo ratings yet
- Husky Air Assignment 5 and 6Document15 pagesHusky Air Assignment 5 and 6varunkalra6No ratings yet
- OS Electromechanical L4Document79 pagesOS Electromechanical L4Jeji HirboraNo ratings yet
- IELTS Practice Listening Test 2 - Part 3 - Take IELTSDocument3 pagesIELTS Practice Listening Test 2 - Part 3 - Take IELTSTresor KAOUNODJI KOLADOUMNo ratings yet
- FMC fixed-mobile convergence Complete Self-Assessment GuideFrom EverandFMC fixed-mobile convergence Complete Self-Assessment GuideNo ratings yet
- Implementation of DCM Module For AUTOSAR Version 4.0: Deepika C. K., Bjyu G., Vishnu V. SDocument8 pagesImplementation of DCM Module For AUTOSAR Version 4.0: Deepika C. K., Bjyu G., Vishnu V. SsebasTR13No ratings yet
- Iit KharagpurDocument39 pagesIit KharagpurBhupendra KharpuseNo ratings yet
- CAN Configuration Within AutosarDocument6 pagesCAN Configuration Within Autosarmail87523No ratings yet
- Internal Combustion Engine Control 1. Engine Control Unit SoftwareDocument10 pagesInternal Combustion Engine Control 1. Engine Control Unit SoftwareLahcen KhalifNo ratings yet
- ECU State Manager Module Development and Design For Automotive Platform Software Based On Autosar 4.0Document6 pagesECU State Manager Module Development and Design For Automotive Platform Software Based On Autosar 4.0Gigi CostelusNo ratings yet
- Autosar BasicsDocument13 pagesAutosar Basicsanils469100% (1)
- 2007 SECAD SchreinerDocument7 pages2007 SECAD SchreinerMerlin Gilbert RajNo ratings yet
- A Review of Wearable Antenna For Body Area Network ApplicationDocument4 pagesA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCNo ratings yet
- A Review of 2D &3D Image Steganography TechniquesDocument5 pagesA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNo ratings yet
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 pagesChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCNo ratings yet
- IJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Document3 pagesIJRITCC Call For Papers (October 2016 Issue) Citation in Google Scholar Impact Factor 5.837 DOI (CrossRef USA) For Each Paper, IC Value 5.075Editor IJRITCCNo ratings yet
- Importance of Similarity Measures in Effective Web Information RetrievalDocument5 pagesImportance of Similarity Measures in Effective Web Information RetrievalEditor IJRITCCNo ratings yet
- Predictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth KotianDocument3 pagesPredictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth Kotianrahul sharmaNo ratings yet
- A Review of Wearable Antenna For Body Area Network ApplicationDocument4 pagesA Review of Wearable Antenna For Body Area Network ApplicationEditor IJRITCCNo ratings yet
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 pagesChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCNo ratings yet
- A Study of Focused Web Crawling TechniquesDocument4 pagesA Study of Focused Web Crawling TechniquesEditor IJRITCCNo ratings yet
- Diagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmDocument5 pagesDiagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmEditor IJRITCCNo ratings yet
- Prediction of Crop Yield Using LS-SVMDocument3 pagesPrediction of Crop Yield Using LS-SVMEditor IJRITCCNo ratings yet
- A Review of 2D &3D Image Steganography TechniquesDocument5 pagesA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCNo ratings yet
- 44 1530697679 - 04-07-2018 PDFDocument3 pages44 1530697679 - 04-07-2018 PDFrahul sharmaNo ratings yet
- Itimer: Count On Your TimeDocument4 pagesItimer: Count On Your Timerahul sharmaNo ratings yet
- Hybrid Algorithm For Enhanced Watermark Security With Robust DetectionDocument5 pagesHybrid Algorithm For Enhanced Watermark Security With Robust Detectionrahul sharmaNo ratings yet
- Safeguarding Data Privacy by Placing Multi-Level Access RestrictionsDocument3 pagesSafeguarding Data Privacy by Placing Multi-Level Access Restrictionsrahul sharmaNo ratings yet
- 45 1530697786 - 04-07-2018 PDFDocument5 pages45 1530697786 - 04-07-2018 PDFrahul sharmaNo ratings yet
- 41 1530347319 - 30-06-2018 PDFDocument9 pages41 1530347319 - 30-06-2018 PDFrahul sharmaNo ratings yet
- Paper On Design and Analysis of Wheel Set Assembly & Disassembly Hydraulic Press MachineDocument4 pagesPaper On Design and Analysis of Wheel Set Assembly & Disassembly Hydraulic Press MachineEditor IJRITCCNo ratings yet
- 49 1530872658 - 06-07-2018 PDFDocument6 pages49 1530872658 - 06-07-2018 PDFrahul sharmaNo ratings yet
- CHAP3QUIZDocument36 pagesCHAP3QUIZDr NorNo ratings yet
- Aspire EasyStore H341H342 PDFDocument74 pagesAspire EasyStore H341H342 PDFlapismoakoNo ratings yet
- Vip JG HostDocument109 pagesVip JG HostVũ Minh TiếnNo ratings yet
- Toshiba Notebook PL ConsumerDocument42 pagesToshiba Notebook PL ConsumercarlhansNo ratings yet
- Network Engineer Interview QuestionsDocument9 pagesNetwork Engineer Interview QuestionsAnonymous kKiwxqhNo ratings yet
- Basics of Debugging The Controller Area Network (CAN) Physical LayerDocument9 pagesBasics of Debugging The Controller Area Network (CAN) Physical LayerWee Chuan PoonNo ratings yet
- Computer Networking Principles Bonaventure 1 30 31 OTC1 PDFDocument282 pagesComputer Networking Principles Bonaventure 1 30 31 OTC1 PDFGabriel MottaNo ratings yet
- Technical Offer NBE - v1.1 05-07-2024Document41 pagesTechnical Offer NBE - v1.1 05-07-2024sohailtalat455No ratings yet
- PTBG EnglishDocument88 pagesPTBG EnglishMuhammad AlyNo ratings yet
- WRAP.2C Installation Guide-WiligearDocument5 pagesWRAP.2C Installation Guide-WiligearВалентин ЗалозныйNo ratings yet
- 1050 Series Temperature Control Tech NoteDocument4 pages1050 Series Temperature Control Tech NoteRyan WilliamsNo ratings yet
- WSN SyllabusDocument2 pagesWSN SyllabusAnil V. WalkeNo ratings yet
- Moshell CommandsDocument80 pagesMoshell Commandsazharz4u100% (2)
- The Media Buyer ManifestoDocument36 pagesThe Media Buyer ManifestoRudy MaheyNo ratings yet
- DH-IPC-HDBW2231E-S-S2: 2MP Lite IR Fixed-Focal Dome Network CameraDocument3 pagesDH-IPC-HDBW2231E-S-S2: 2MP Lite IR Fixed-Focal Dome Network CameraSANTHOSHI ELECTRONICSNo ratings yet
- Imagicle UC Suite For Cisco UC - Call Recording - Administration GuideDocument118 pagesImagicle UC Suite For Cisco UC - Call Recording - Administration Guidejorigoni2013No ratings yet
- GSM Modem - Sim 300 (Sending Text SMS)Document3 pagesGSM Modem - Sim 300 (Sending Text SMS)ronallldo3289No ratings yet
- Tor-V1 6Document144 pagesTor-V1 6jghcNo ratings yet
- Using TFTP Server in Windows PDFDocument8 pagesUsing TFTP Server in Windows PDFhadiriyantoNo ratings yet
- UMTS Link Budget Basic ParameterDocument7 pagesUMTS Link Budget Basic ParameterexcaliburslvNo ratings yet
- Licensing-Guide 2018 V1 0 WebDocument11 pagesLicensing-Guide 2018 V1 0 Web劉子齊No ratings yet
- Netsim Experiment Manual - 1Document163 pagesNetsim Experiment Manual - 1Rajiv PathakNo ratings yet
- 327 DH-NVR5032Document3 pages327 DH-NVR5032Maher MelieneNo ratings yet
- EC-Council: Exam Questions 312-50v10Document6 pagesEC-Council: Exam Questions 312-50v10Ephrem AlemuNo ratings yet
- HGDRDocument19 pagesHGDRAjay RaiNo ratings yet
- Audiocodes - Mediant 800 Ucpe DatasheetDocument2 pagesAudiocodes - Mediant 800 Ucpe DatasheetJNo ratings yet
- Airtel StrategiesDocument3 pagesAirtel Strategiesprabhakar_elexNo ratings yet
- Apex OverviewDocument94 pagesApex Overviewvalendas100% (3)
- Piso Net DiagramDocument8 pagesPiso Net DiagramLauro Planas100% (2)