Control System Lab Manual
Control System Lab Manual
Download as doc, pdf, or txt
You might also like
- Comparison Between Magnetic and Electric CircuitDocument2 pagesComparison Between Magnetic and Electric CircuitVenkata Subramanian100% (8)
- Fiber Optic MCQ Questions: Take Fiber Optics MCQ Test & Online Quiz To Test Your KnowledgeDocument5 pagesFiber Optic MCQ Questions: Take Fiber Optics MCQ Test & Online Quiz To Test Your KnowledgePALLAV MANDVE100% (2)
- Design of Electrical Circuits using Engineering Software ToolsFrom EverandDesign of Electrical Circuits using Engineering Software ToolsNo ratings yet
- Load Flow Matrices IIT Roorkee Notes NPTELDocument88 pagesLoad Flow Matrices IIT Roorkee Notes NPTELconsultrail100% (1)
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument48 pagesPower Systems Protection Course: Al-Balqa Applied UniversityPIOS CHICKENNo ratings yet
- Final Et NotesDocument123 pagesFinal Et NotesyounusmohamadNo ratings yet
- SSSC PPT (Autosaved)Document14 pagesSSSC PPT (Autosaved)shubham bansalNo ratings yet
- Power System 1 Imp GtuDocument3 pagesPower System 1 Imp GtuJinger KartikNo ratings yet
- Unit V Design of Controllers For Drives: 3.1transfer Function For DC MotorDocument12 pagesUnit V Design of Controllers For Drives: 3.1transfer Function For DC Motormanoj kumarNo ratings yet
- Shunt Compensators: T.S.L.V.AyyaraoDocument9 pagesShunt Compensators: T.S.L.V.Ayyaraokrishnareddy_chintalaNo ratings yet
- Questions 1Document11 pagesQuestions 1anvithaNo ratings yet
- Torque-Slip Characteristics and Its ExplanationDocument17 pagesTorque-Slip Characteristics and Its Explanationvoltax1No ratings yet
- Power Factor Project PDFDocument5 pagesPower Factor Project PDFPritam100% (1)
- Q1. What Do You Mean by Harmonics?Document3 pagesQ1. What Do You Mean by Harmonics?vinesh_viswanathan_3100% (1)
- Stability of Electric Drives: Dr. K. R. RajagopalDocument9 pagesStability of Electric Drives: Dr. K. R. RajagopalPuru GaurNo ratings yet
- DC Motor Speed Control by Four Quadrant ChopperDocument12 pagesDC Motor Speed Control by Four Quadrant ChopperSokNov NaiNo ratings yet
- UPQCDocument15 pagesUPQCPrashanth BattuNo ratings yet
- MP & DSP Lab ManualDocument122 pagesMP & DSP Lab ManualShiva RamNo ratings yet
- Chapter 3: Electric Drives and Converters Feeding Electric MotorsDocument11 pagesChapter 3: Electric Drives and Converters Feeding Electric MotorsSelemon AssefaNo ratings yet
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- Tutorial Ans 1Document13 pagesTutorial Ans 1anirbansingha345No ratings yet
- GATE EE 2015 Solved Paper PDFDocument629 pagesGATE EE 2015 Solved Paper PDFohioNo ratings yet
- Question Bank-EE2352 - Solid State DrivesDocument4 pagesQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Me Reference BooksDocument2 pagesMe Reference BooksEric HernandezNo ratings yet
- Edc Handwritten Notes 2Document58 pagesEdc Handwritten Notes 2m1u2raliNo ratings yet
- Model Answer - Sheet 1 HVE - 2020Document12 pagesModel Answer - Sheet 1 HVE - 2020karim mostafaNo ratings yet
- 1-MHz Self-Driven ZVS Full-Bridge Converter For 48-V Power Pod and DC-DC BrickDocument10 pages1-MHz Self-Driven ZVS Full-Bridge Converter For 48-V Power Pod and DC-DC Brick李漢祥No ratings yet
- Electrical Braking of DC MotorDocument5 pagesElectrical Braking of DC MotorBhavani MurugesanNo ratings yet
- Lecture 9: Space-Vector Models: ELEC-E8405 Electric Drives (5 ECTS)Document30 pagesLecture 9: Space-Vector Models: ELEC-E8405 Electric Drives (5 ECTS)Yazid AbouchihabeddineNo ratings yet
- Synchronous Machines Question BankDocument10 pagesSynchronous Machines Question BankelecenggNo ratings yet
- Sepic Converter: Prepared ByDocument30 pagesSepic Converter: Prepared BychaitanyaNo ratings yet
- PSOC Question BankDocument18 pagesPSOC Question Bankfvijayami100% (1)
- DC Motor BrakingDocument15 pagesDC Motor BrakingSusmita DasNo ratings yet
- Electric Drive QuestionsDocument2 pagesElectric Drive QuestionsRakesh ThapliyalNo ratings yet
- Eee-Vi-Switchgear & Protection (10ee62) - Notes PDFDocument92 pagesEee-Vi-Switchgear & Protection (10ee62) - Notes PDFRK KNo ratings yet
- Reference Frame TheoryDocument42 pagesReference Frame TheoryPravin Patel100% (1)
- WattmeterDocument57 pagesWattmeterPankaj DabadeNo ratings yet
- 3phim T Slipcharacteristics Problems 181124171548Document22 pages3phim T Slipcharacteristics Problems 181124171548jyothilalNo ratings yet
- Thyristor ReportDocument9 pagesThyristor ReportDhaval GamiNo ratings yet
- Course Outline-TICIDocument1 pageCourse Outline-TICISajidNo ratings yet
- Load Test On Syn MotorDocument3 pagesLoad Test On Syn Motorbiki08226No ratings yet
- Assignment PSEDocument5 pagesAssignment PSEdipakk beraNo ratings yet
- Power Electronics 2 MarkDocument5 pagesPower Electronics 2 MarkPrakash Mahendran100% (2)
- "Bridge B2HZ" For The Control of A DC MotorDocument16 pages"Bridge B2HZ" For The Control of A DC MotorhadiNo ratings yet
- DC Motor DrivesDocument53 pagesDC Motor DrivesManoj NNo ratings yet
- 3 Transmission Line Modelling and PerformanceDocument22 pages3 Transmission Line Modelling and PerformanceDharamNo ratings yet
- Tutorial 2 - Controlled Converter Driven DC Motor PDFDocument5 pagesTutorial 2 - Controlled Converter Driven DC Motor PDFalecsilveiraNo ratings yet
- EE5702R Advance Power System Analysis:: Power System State Estimation IDocument68 pagesEE5702R Advance Power System Analysis:: Power System State Estimation IChetan KotwalNo ratings yet
- Two Mark QuestionDocument20 pagesTwo Mark QuestioncoolrajeeeNo ratings yet
- Tutorial Questions (DC Motor) Q1Document1 pageTutorial Questions (DC Motor) Q1Serwan BamerniNo ratings yet
- Project Report On Bluetooth Controlled Robot CarDocument23 pagesProject Report On Bluetooth Controlled Robot CarKav MavNo ratings yet
- Power Systems IIDocument2 pagesPower Systems IIrameshNo ratings yet
- Ee481 p11 Root Locus DesignDocument77 pagesEe481 p11 Root Locus DesignDwi Ika BasithaNo ratings yet
- Question Bank Ac MachinesDocument4 pagesQuestion Bank Ac Machinesashwin paul100% (1)
- Ee2257 Control System Lab ManualDocument57 pagesEe2257 Control System Lab Manualchristorec100% (1)
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- Get Homework/Assignment DoneDocument61 pagesGet Homework/Assignment DoneHadiGunaNo ratings yet
- Unit-2 Meshed SystemDocument2 pagesUnit-2 Meshed SystemVenkata SubramanianNo ratings yet
- Induced Emf PDFDocument4 pagesInduced Emf PDFVenkata SubramanianNo ratings yet
- Laws Governing Magnetic Circuits PDFDocument2 pagesLaws Governing Magnetic Circuits PDFVenkata SubramanianNo ratings yet
- WECSDocument26 pagesWECSVenkata Subramanian100% (1)
- Energy Savings Street Lighting EN PDFDocument38 pagesEnergy Savings Street Lighting EN PDFVenkata SubramanianNo ratings yet
- Unit - No.:1 (Magnetic Circuits & Magnetic Materials) : CoimbatoreDocument3 pagesUnit - No.:1 (Magnetic Circuits & Magnetic Materials) : CoimbatoreVenkata SubramanianNo ratings yet
- Hysteresis and Eddy Current Losses PDFDocument2 pagesHysteresis and Eddy Current Losses PDFVenkata SubramanianNo ratings yet
- EE6401 Notes PDFDocument118 pagesEE6401 Notes PDFVenkata SubramanianNo ratings yet
- Induction MotorDocument20 pagesInduction MotorVenkata SubramanianNo ratings yet
- Chattering Phenomenon Supression of Buck Boost DC-DC Converter With Fuzzy Sliding Modes ControlDocument6 pagesChattering Phenomenon Supression of Buck Boost DC-DC Converter With Fuzzy Sliding Modes ControlVenkata SubramanianNo ratings yet
- Ee2254 - Linear Integrated Circuits and ApplicationsDocument125 pagesEe2254 - Linear Integrated Circuits and ApplicationsVenkata SubramanianNo ratings yet
- Full Report 2007Document23 pagesFull Report 2007Venkata SubramanianNo ratings yet
- Department of Electrical and Electronics EngineeringDocument1 pageDepartment of Electrical and Electronics EngineeringVenkata SubramanianNo ratings yet
- Electronic Devices and Circuits Question Bank PDFDocument8 pagesElectronic Devices and Circuits Question Bank PDFVenkata Subramanian100% (1)
- Next Previous: Fig 6.8: Normal Incidence at A Plane Boundary Plane Electromagnetic WaveDocument23 pagesNext Previous: Fig 6.8: Normal Incidence at A Plane Boundary Plane Electromagnetic WaveVenkata SubramanianNo ratings yet
- Project Guidelines: Anna UniversityDocument24 pagesProject Guidelines: Anna UniversityVenkata SubramanianNo ratings yet
- WECS1Document11 pagesWECS1Venkata Subramanian50% (2)
- Wind NotesDocument18 pagesWind NotesVenkata SubramanianNo ratings yet
- Final Copy of Lab Manual CNL 2015 CourseDocument108 pagesFinal Copy of Lab Manual CNL 2015 CourseVipul KaushikNo ratings yet
- 3-Control 42C Spec SheetDocument2 pages3-Control 42C Spec Sheetarij hhNo ratings yet
- 10 Tips For Tricking Out and Optimizing Your Android SmartphoneDocument598 pages10 Tips For Tricking Out and Optimizing Your Android SmartphoneglenNo ratings yet
- FDD LTE Handover OptimizationDocument35 pagesFDD LTE Handover OptimizationmunzewNo ratings yet
- Mikwave - Antena DR-A2K2D22-F2ADocument2 pagesMikwave - Antena DR-A2K2D22-F2AEstefanía BahamondesNo ratings yet
- HXPM8X3WWW1717065T2CT28 MTS78 PDFDocument1 pageHXPM8X3WWW1717065T2CT28 MTS78 PDFПётр НовиковNo ratings yet
- DigitalSignalProcessing Course McGillDocument6 pagesDigitalSignalProcessing Course McGillSalman NazirNo ratings yet
- LTE Express: End-to-End LTE Network: HSS MME OCS IP Network IP Mobile Core Application ServerDocument1 pageLTE Express: End-to-End LTE Network: HSS MME OCS IP Network IP Mobile Core Application Serverdtheo00No ratings yet
- TF June2022Document16 pagesTF June2022Ansh SinghNo ratings yet
- Amity University - MSCIT - Assignments - MCQDocument15 pagesAmity University - MSCIT - Assignments - MCQNikunj JasaniNo ratings yet
- TX2002 20datasheetDocument2 pagesTX2002 20datasheetidmmpzNo ratings yet
- BPSK Probability of ErrorDocument85 pagesBPSK Probability of Errorمهند عدنان الجعفريNo ratings yet
- Questionnaire For Planning Antenna SystemsDocument1 pageQuestionnaire For Planning Antenna SystemsBrianNo ratings yet
- Dual Band MIMO Antenna For 5G Smartphone ApplicationDocument103 pagesDual Band MIMO Antenna For 5G Smartphone Applicationss1976No ratings yet
- RRU3965&RRU3965d Description: Huawei Technologies Co., LTDDocument22 pagesRRU3965&RRU3965d Description: Huawei Technologies Co., LTDAlex PereiraNo ratings yet
- 736347Document2 pages736347AndriusRatkevičiusNo ratings yet
- MSB Power Dac Review (Translated From French)Document7 pagesMSB Power Dac Review (Translated From French)sheppard21No ratings yet
- Course Noise p3Document28 pagesCourse Noise p3marinkokNo ratings yet
- NCERT Grade-12 Physics CH 15 Communication-System1Document5 pagesNCERT Grade-12 Physics CH 15 Communication-System1Bikash DeyNo ratings yet
- Huawei SmartAX MA5600T Brief Product Brochure (10-Dec-2010)Document2 pagesHuawei SmartAX MA5600T Brief Product Brochure (10-Dec-2010)Azyan BaharNo ratings yet
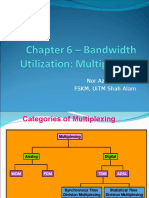
- Nor Azimah Khalid FSKM, Uitm Shah AlamDocument32 pagesNor Azimah Khalid FSKM, Uitm Shah AlamNOl ShAnahNo ratings yet
- DRFU Description: Huawei Technologies Co., LTDDocument9 pagesDRFU Description: Huawei Technologies Co., LTDRajesh Kumar SubramaniNo ratings yet
- RFM SAW ComponentDocument17 pagesRFM SAW ComponentCS LumNo ratings yet
- Lab Manual - Exp - 8 - Synch and Asynch 3bit CountersDocument5 pagesLab Manual - Exp - 8 - Synch and Asynch 3bit CountersApoorvaNo ratings yet
- EC2251 - Electronic Circuits IIDocument50 pagesEC2251 - Electronic Circuits IIwizardvenkatNo ratings yet
- Ultrasonic Transducers: Part NumberDocument2 pagesUltrasonic Transducers: Part NumberYogesh ThackreyNo ratings yet
- AirScale Micro RRH Sales Guide v5.3Document40 pagesAirScale Micro RRH Sales Guide v5.3Adil Murad100% (1)
- DBM To Watt ConvDocument5 pagesDBM To Watt ConvAsif Majeed MalikNo ratings yet
- WP3 Family Devices-9Document16 pagesWP3 Family Devices-9speedmetal007No ratings yet