Book 1
Book 1
Download as pdf or txt
You might also like
- Sakurai Ch4 1 2 3 4 8 10 12Document12 pagesSakurai Ch4 1 2 3 4 8 10 12Fernando Da Silva BorgesNo ratings yet
- 3.LU DecompositionDocument14 pages3.LU Decompositionfatima135imranNo ratings yet
- Putnam Linear AlgebraDocument6 pagesPutnam Linear AlgebrainfinitesimalnexusNo ratings yet
- F15 SolutionsDocument7 pagesF15 Solutionsshraban dasNo ratings yet
- Quantum Mechanics Math ReviewDocument5 pagesQuantum Mechanics Math Reviewstrumnalong27No ratings yet
- Det Eval ManDocument4 pagesDet Eval ManNaveen Kumar SinghNo ratings yet
- Solutions To Exercises in An Introduction To Convexity: Øyvind RyanDocument63 pagesSolutions To Exercises in An Introduction To Convexity: Øyvind RyanPriyansh RajputNo ratings yet
- MAT 461/561: Introduction, 3.1 Gaussian Elimination: James V. Lambers January 22, 2020Document4 pagesMAT 461/561: Introduction, 3.1 Gaussian Elimination: James V. Lambers January 22, 2020DebisaNo ratings yet
- Conv SolutionsDocument63 pagesConv SolutionsYudhaNo ratings yet
- Anasol 2019Document6 pagesAnasol 2019Atoloye Habeeb OlawaleNo ratings yet
- Deep Learning Assignment3 SolutionDocument9 pagesDeep Learning Assignment3 SolutionRaushan KashyapNo ratings yet
- Elementary Linear AlgebraDocument197 pagesElementary Linear Algebrajilbo604No ratings yet
- Linear Algebra 1992Document5 pagesLinear Algebra 1992pratikNo ratings yet
- Matrices and Determinants part 2Document4 pagesMatrices and Determinants part 2nfabrotherssNo ratings yet
- ws8 Matrix AlgebraDocument4 pagesws8 Matrix AlgebraAmrinNo ratings yet
- Mathematics 307 Final ExamDocument5 pagesMathematics 307 Final ExamAhmadNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTheypartygirlNo ratings yet
- Assignment 3 Sol 1 Series and Matrices IitmDocument3 pagesAssignment 3 Sol 1 Series and Matrices IitmRam Lakhan MeenaNo ratings yet
- QM1 Problem Set 1 Solutions - Mike SaelimDocument5 pagesQM1 Problem Set 1 Solutions - Mike SaelimryzesyaaNo ratings yet
- IMC Simulation: June 15, 2009Document4 pagesIMC Simulation: June 15, 2009Syaifullah MangantjoNo ratings yet
- GATE Mathematics Paper-2005Document12 pagesGATE Mathematics Paper-2005RajkumarNo ratings yet
- Practice Final Exam SolutionsDocument5 pagesPractice Final Exam SolutionsJohn ParkNo ratings yet
- Analytic Number Theory NoteDocument36 pagesAnalytic Number Theory Noteabdullah ghamdiNo ratings yet
- String TheoryDocument12 pagesString TheoryYashvinder SinghNo ratings yet
- Solutions For Problems in The 9 International Mathematics Competition For University StudentsDocument4 pagesSolutions For Problems in The 9 International Mathematics Competition For University StudentsArief CahyadiNo ratings yet
- LAG13Document2 pagesLAG13Arthur Nlengu'eneNo ratings yet
- Math 110: Linear Algebra Homework #8: David ZywinaDocument8 pagesMath 110: Linear Algebra Homework #8: David ZywinaCody SageNo ratings yet
- 7 Diagonalization and Quadratic FormsDocument45 pages7 Diagonalization and Quadratic FormsAchuan ChenNo ratings yet
- Solutions To Chapter 2Document11 pagesSolutions To Chapter 2Tom DavisNo ratings yet
- sec2-3Document10 pagessec2-3toppoaniket44No ratings yet
- String TheoryDocument12 pagesString TheoryYashvinder SinghNo ratings yet
- MIT18 06S10 Pset2 s10 SolnDocument6 pagesMIT18 06S10 Pset2 s10 Solndjoseph_1No ratings yet
- Solution To Final Exam of SF2842 Geometric Control TheoryDocument3 pagesSolution To Final Exam of SF2842 Geometric Control TheoryBizzleJohnNo ratings yet
- mth102 2024 A03Document3 pagesmth102 2024 A03nucleas9No ratings yet
- mt01Document6 pagesmt01zzeynepddNo ratings yet
- Algebra and Number Theory Exam: Part I Multiple Choice TestDocument4 pagesAlgebra and Number Theory Exam: Part I Multiple Choice TestAnaNkineNo ratings yet
- Eli Maor, e The Story of A Number, Among ReferencesDocument10 pagesEli Maor, e The Story of A Number, Among ReferencesbdfbdfbfgbfNo ratings yet
- FAC Sample 2010Document6 pagesFAC Sample 2010aslam844No ratings yet
- 2nd To 1st OrderDocument29 pages2nd To 1st OrderAdithya ChandrasekaranNo ratings yet
- 2024-02-20 MA110 Slides CompilationDocument62 pages2024-02-20 MA110 Slides CompilationmayankspareNo ratings yet
- LA Sheet2 SolsDocument6 pagesLA Sheet2 Solstony.govoniNo ratings yet
- Solutions For Problems in The 9 International Mathematics Competition For University StudentsDocument4 pagesSolutions For Problems in The 9 International Mathematics Competition For University StudentsMuhammad Al KahfiNo ratings yet
- Problem Set 6: 2 1 2 1 T 2 T T 2 T 3 TDocument6 pagesProblem Set 6: 2 1 2 1 T 2 T T 2 T 3 TAkshu AshNo ratings yet
- ESE500 F18 MidtermDocument7 pagesESE500 F18 MidtermkaysriNo ratings yet
- Linear SystemsDocument5 pagesLinear SystemsVedant GavhaneNo ratings yet
- Handout Lecture5 D2Document9 pagesHandout Lecture5 D2kkkkNo ratings yet
- HW 1 SDocument4 pagesHW 1 SGunvir SinghNo ratings yet
- Lec 12Document7 pagesLec 12leyag41538No ratings yet
- Eigenvalues: Matrices: Geometric InterpretationDocument8 pagesEigenvalues: Matrices: Geometric InterpretationTu DuongNo ratings yet
- Math 5310, Homework #5: Problem 1Document11 pagesMath 5310, Homework #5: Problem 1rashslashNo ratings yet
- 1803Document254 pages1803dinhanhminhqtNo ratings yet
- Algebra Linear e CombinatóriaDocument11 pagesAlgebra Linear e CombinatóriaMatheus DomingosNo ratings yet
- Transformations SummaryDocument8 pagesTransformations SummaryJiongHow SosadNo ratings yet
- 221 HomeworkDocument45 pages221 Homeworkkevincshih100% (1)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- TI CCdebugger05 User MannualDocument20 pagesTI CCdebugger05 User MannualDamianNo ratings yet
- Board Level Shield 2 PieceDocument1 pageBoard Level Shield 2 PieceDamianNo ratings yet
- Board Level Shield 1 PieceDocument1 pageBoard Level Shield 1 PieceDamianNo ratings yet
- BoardLevelShield LowProfile FilledDocument1 pageBoardLevelShield LowProfile FilledDamianNo ratings yet
- BoardLevelShield LowProfileDocument1 pageBoardLevelShield LowProfileDamianNo ratings yet
- Shielded Power Inductors - PFL2015Document2 pagesShielded Power Inductors - PFL2015DamianNo ratings yet
- IAR RefDocument137 pagesIAR RefDamianNo ratings yet
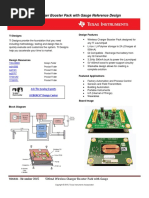
- 500ma Wireless Charger Booster Pack With Gauge Reference DesignDocument25 pages500ma Wireless Charger Booster Pack With Gauge Reference DesignDamianNo ratings yet
- bq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerDocument44 pagesbq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerDamianNo ratings yet
- Master Slave SwitchDocument4 pagesMaster Slave SwitchDamianNo ratings yet
- PCA9956ADocument53 pagesPCA9956ADamianNo ratings yet
- Temt6000X01: Ambient Light Sensor, Rohs Compliant, Released For Lead (PB) - Free Solder Process, Aec-Q101 ReleasedDocument8 pagesTemt6000X01: Ambient Light Sensor, Rohs Compliant, Released For Lead (PB) - Free Solder Process, Aec-Q101 ReleasedDamianNo ratings yet
- PCA9955ADocument62 pagesPCA9955ADamianNo ratings yet
- App Note 3 - Motion Driver 6.12 Porting GuideDocument14 pagesApp Note 3 - Motion Driver 6.12 Porting GuideDamianNo ratings yet
- Master Slave SwitchDocument4 pagesMaster Slave SwitchDamianNo ratings yet
- MCP73831T Ic DatasheetDocument28 pagesMCP73831T Ic DatasheetSaurabh KaramchandaniNo ratings yet
- MotionDriver Tutorial 12212018 CBDocument12 pagesMotionDriver Tutorial 12212018 CBDamianNo ratings yet
- CBSE Class 6 Mathematics Algebra Worksheet Set BDocument2 pagesCBSE Class 6 Mathematics Algebra Worksheet Set Bshivani67% (3)
- Solution of Nonlinear Equations: 1 BisectionDocument9 pagesSolution of Nonlinear Equations: 1 BisectionJose D CostaNo ratings yet
- Numerical Methods Implinting by PythonDocument56 pagesNumerical Methods Implinting by PythonIshwor DhitalNo ratings yet
- Cubic Spline - From Wolfram MathWorldDocument2 pagesCubic Spline - From Wolfram MathWorldzikaNo ratings yet
- CIVIL-MTech 2nd TermDocument93 pagesCIVIL-MTech 2nd TermToni BlairNo ratings yet
- Homework 02Document11 pagesHomework 02lando de chanceNo ratings yet
- A User-Friendly FORTRAN BVP SolverDocument18 pagesA User-Friendly FORTRAN BVP SolverLorem IpsumNo ratings yet
- 4session 6Document8 pages4session 6rajeshmholmukheNo ratings yet
- Splines (Quadratic Cubic Natural Clamped)Document6 pagesSplines (Quadratic Cubic Natural Clamped)Dalila AsilahNo ratings yet
- Markov Decision Processes and Exact Solution MethodsDocument34 pagesMarkov Decision Processes and Exact Solution MethodsThườngNhẫnNo ratings yet
- Statistics and Numerical Methods: Question Ii November / December 2010Document18 pagesStatistics and Numerical Methods: Question Ii November / December 2010Mesiya AnastasiabarusNo ratings yet
- (FREE PDF Sample) Introductory Methods of Numerical Analysis 5th Edition S.S. Sastry EbooksDocument84 pages(FREE PDF Sample) Introductory Methods of Numerical Analysis 5th Edition S.S. Sastry EbooksszeretderajNo ratings yet
- Week 4Document15 pagesWeek 4Mohmmad BreakNo ratings yet
- Nonmem Users Guide Introduction To Nonmem 7 Robert J. Bauer ICON Development Solutions Ellicott City, Maryland February 26, 2010Document61 pagesNonmem Users Guide Introduction To Nonmem 7 Robert J. Bauer ICON Development Solutions Ellicott City, Maryland February 26, 2010gshgssgNo ratings yet
- AnskeyDocument21 pagesAnskeyLuis Vigueros CárdenasNo ratings yet
- SE Electronics and Communication Engg (Advanced Communication Technology) - 19072024Document71 pagesSE Electronics and Communication Engg (Advanced Communication Technology) - 19072024akshaysinghdev2No ratings yet
- Case Problem 1 Workload BalancingDocument3 pagesCase Problem 1 Workload BalancingSomething Chic100% (1)
- Big-M Two Phase MethodsDocument51 pagesBig-M Two Phase Methodsbits_who_am_iNo ratings yet
- AnnotBibliog 1956Document49 pagesAnnotBibliog 1956jairNo ratings yet
- Module 1 - Introduction To Numerical Methods PDFDocument20 pagesModule 1 - Introduction To Numerical Methods PDFJM Flores De SilvaNo ratings yet
- Total Gadha-Maxima and MinimaDocument14 pagesTotal Gadha-Maxima and MinimaSaket Shahi100% (1)
- (A-MATH) Chapter 4 - PolynomialsDocument19 pages(A-MATH) Chapter 4 - PolynomialstrinketvodsNo ratings yet
- MTH 603Document3 pagesMTH 603zainab zebNo ratings yet
- Plus Two Chapter Wise Important 3,6 and 10 MarksDocument3 pagesPlus Two Chapter Wise Important 3,6 and 10 MarksAhamedIqbal0% (1)
- MSG 00009Document17 pagesMSG 00009Aswath78No ratings yet
- FEM Mathematical ModelingDocument19 pagesFEM Mathematical ModelingCASTROLWASWAYA NZYOOMANo ratings yet
- Ecse 543A Numerical Methods in Electrical Engineering Assignment 2Document2 pagesEcse 543A Numerical Methods in Electrical Engineering Assignment 2murster101No ratings yet
- IDFT & CONVOLUTIONS - PROBLEMS Part 6Document19 pagesIDFT & CONVOLUTIONS - PROBLEMS Part 6Abishek RajeshNo ratings yet
- Extend OptimxDocument13 pagesExtend OptimxGiorgio OttolinaNo ratings yet
- Chapter 10 Manipulation of Simple PolynomialsDocument24 pagesChapter 10 Manipulation of Simple Polynomialsmxalg5463No ratings yet