
Unesco-Eolss Sample Chapters: Structural Dynamics
Uploaded by
Mohara NascimentoUnesco-Eolss Sample Chapters: Structural Dynamics
Uploaded by
Mohara NascimentoSTRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T.
Krauthammer
STRUCTURAL DYNAMICS
J. W. Tedesco
Department of Civil and Environmental Engineering, University of Houston, USA
T. Krauthammer
Department of Civil and Coastal Engineering, University of Florida, USA
Keywords: Underdamped, Overdamped, Harmonic Excitation, Periodic Excitation,
Duhamel Integral, Dynamic Excitation, Vibration, Orthogonality, Stiffness, Earthquake
Contents
1. Introduction
2. Vibration of Single Degree of Freedom Systems
S
2.1. Basic Concepts
R
2.2. Formulation of the Equation of Motion
AP S
2.3. Undamped Free Vibration
TE
H S
2.4. Free Vibrations with Viscous Damping
2.4.1. Case 1: Less than Critical Damping (Underdamped)
C OL
2.4.2. Case 2: Critical Damping
2.4.3. Case 3: Greater than Critical Damping (Overdamped)
2.5. Response to Harmonic Excitation
E -E
2.6. Resonance
3. Response of SDOF Systems to General Dynamic Loading
3.1. Response to Periodic Excitation
PL O
3.2. Response to Unit Impulse
M SC
3.3. Duhamel Integral
3.4. Response to Arbitrary Dynamic Excitation
3.5. Response Spectrum
4. Multi Degree of Freedom (MDOF) Systems
SA NE
4.1. Natural Vibration Frequencies
4.2. Natural Vibration Modes
4.3. Orthogonality of Natural Modes
U
4.4. Generalized Mass and Stiffness Matrices
4.5. Analysis of Dynamic Response by Mode Superposition
4.6. Mode Superposition Solution for Systems with Classical Damping
5. Response Spectrum and Load-Impulse Analysis
5.1. Earthquake Response Spectra
5.2. Earthquake Design Spectra
5.3. Blast and Shock Response Spectra
5.4. Load-Impulse Diagrams
Glossary
Biographical Sketches
Bibliography
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
Summary
This chapter addresses the response of structures subject to dynamic loads. The majority
of the material presented in this chapter has been condensed and replicated from
Tedesco et al. (1999); the reader is encouraged to refer to this for a more comprehensive
discussion of the topics presented herein.
1. Introduction
In this chapter, dynamic means time varying. That is, the application and/or removal of
the loads necessarily varies with time (Irvine, 1986). Moreover, the response (i.e.,
resulting deflections, internal stresses, etc.) of a structure resisting such loads is also
time dependent or dynamic in nature.
In reality, no loads that are applied to a structure are truly static. Since all loads must be
S
applied to a structure in some particular sequence, a time variation of the force is
R
inherently involved. However, whether or not a load should be considered dynamic is a
AP S
relative matter. The most significant parameter influencing the extent of the dynamic
TE
H S
effect a load has upon a structure is the natural period of vibration of the structure, T.
Briefly stated, the natural period of vibration is the time required for the structure to go
C OL
through one complete cycle of free vibration. If the application time for the load is large
compared to the natural period of the structure, then there will be no dynamic effect,
and the load can be considered static. If, on the other hand, the application time for the
E -E
load is in close proximity to the natural period of the structure, it will induce a dynamic
response.
PL O
Situations in which dynamic loading must be considered are quite numerous. Examples
include: the response of bridges to moving vehicles; the action of wind gusts, ocean
M SC
waves, or blast pressures upon a structure; the effect of landing impact upon aircraft; the
effect on a building structure whose foundation is subjected to earthquake excitation;
and the response of structures subjected to alternating forces caused by oscillating
SA NE
machinery (Tauchert, 1974). Under these types of loading conditions, either the entire
structure or certain components of the structure are set in motion (i.e., caused to
vibrate). Therefore, it is necessary to apply the principles of dynamics rather than those
U
of statics to evaluate the structural response. It will be demonstrated throughout this
chapter that the maximum deflections, stresses, strains, and various other response
quantities exhibited by a structure are generally more severe when loads of a given
amplitude are applied dynamically rather than statically.
The response of a structure to dynamic loads may be categorized as either deterministic
or nondeterministic (Clough and Penzien, 1975). If the magnitude, point of application,
and time variation of the loading are completely known, the loading is said to be
prescribed, and the analysis of the structural response to this prescribed loading is
defined as a deterministic analysis. However, if the time variation and other
characteristics of the loading are not completely known, but can be defined only in a
statistical sense, the loading is referred to as random, and the corresponding analysis of
the structural response is termed nondeterministic. This chapter emphasizes the
deterministic response of structures to prescribed dynamic loading.
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
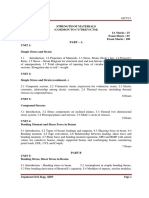
To expedite the dynamic analysis of structures, it is convenient to classify dynamic
loads as either periodic or nonperiodic. Periodic loadings repeat themselves at equal
time intervals. A single time interval is called the period, T0 . The simplest form of
periodic loading can be represented by a sine function as shown in Figure 1a. This type
of periodic loading is referred to as simple harmonic. Another form of periodic load is
illustrated in Figure 1b. This loading is termed periodic, nonharmonic. Most periodic
loads may be accurately represented by summing a sufficient number of harmonic terms
in a Fourier series. Any loading that cannot be characterized as periodic is nonperiodic.
Nonperiodic loads range from short-duration impulsive types, such as a wind gust or a
blast pressure (Figure 1c), to fairly long duration loads, such as an earthquake ground
motion (Figure 1d).
S
R
AP S
TE
H S
C OL
Figure 1. Types of dynamic loadings: simple harmonic; (b) periodic, nonharmonic; (c)
nonperiodic, short duration; (d) nonperiodic, long duration
E -E
A structural dynamics problem differs from its static counterpart in two essential aspects
(Craig, 1981). The first and most obvious difference is the time-varying nature of the
excitation (applied loads) and the response (resulting deflections, stresses, etc.). That is,
PL O
both are functions of time in a structural dynamics problem. This precludes the
M SC
existence of a single solution. The analyst must investigate the solution over a specific
interval of time to fully evaluate the structural response. Thus, a dynamic analysis is
inherently more computationally intensive than a static analysis.
SA NE
However, the most important feature differentiating a dynamic problem from the
corresponding static problem is the occurrence of inertia forces when the loading is
dynamically applied. Consider the vertical cantilever structure shown in Figure 2. If a
U
force F is applied statically at the tip of the cantilever, as illustrated in Figure 2a, the
resulting shear force, V , bending moment, M , and associated stresses and deflections
in the structure can be computed from the basic static structural analysis principles, and
are directly proportional to the force, F . If, however, a time-varying force F t is
applied to the tip of the cantilever, as illustrated in Figure 2b, the structure is set in
motion, i.e., it vibrates and experiences accelerations. Inertia forces proportional to the
mass then develop in the structure that must resist these forces. The significance of the
contribution made by inertia forces to the shear force, V t , bending moment, M t ,
and related stresses and deflections in the structure determines whether a dynamic
analysis is warranted.
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
Figure 2. Cantilever structure subjected to (a) a static load; (b) a dynamic load
S
R
Typical of any problem in engineering mechanics, an appropriate methodology for
AP S
conducting a dynamic structural analysis is essential to achieve a viable solution. One
TE
H S
such methodology is summarized in Figure 3, which defines three basic phases of a
dynamic analysis: (1) identification of the physical problem, (2) definition of the
C OL
mechanical model, and (3) solution of the mechanical model.
Phase 1 entails recognition of the problem as it exists in nature. This includes accurately
E -E
identifying and describing the physical structure, or structural component, and the
source of the dynamic loading. Phase 2 requires an interpretation of the physical
problem into a form conducive to available analysis techniques. This involves defining
PL O
a mechanical model that accurately represents the dynamic behavior of the physical
problem in terms of geometry, kinematics, loading, and boundary conditions. The
M SC
idealization of the physical problem to a mechanical model conducive to available
analysis techniques generally involves some simplifying assumptions, which influences
the formulation of the differential equations governing the structural response. In Phase
SA NE
3, the governing differential equations are solved to obtain the dynamic response. The
solution is only as accurate as the representation provided by the mechanical model.
Therefore, this step generally requires an assessment for accuracy. If the predefined
U
accuracy criteria are met, the mechanical model has then been solved with a satisfactory
level of confidence, and the analysis results can be interpreted in a meaningful manner.
For complex structures, it may be necessary to refine the analysis by considering a more
detailed mechanical model or to introduce design improvements for structural
optimization, which leads to further analyses involving several iterations.
The complexity of the analysis depends largely on the physical problem under
consideration and on the mechanical model that must be employed to obtain a
sufficiently accurate response prediction. A linear analysis can be a routine task,
although a fully three-dimensional solution may require a significant amount of human
effort and computing resources. On the other hand, a nonlinear dynamic analysis can
represent a major challenge to the ingenuity of the analyst and require very significant
resources.
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
S
R
AP S
TE
H S
C OL
E -E
PL O
M SC
Figure 3. Methodology for conducting a dynamic analysis
SA NE
Indeed, the most important step in the dynamic analysis procedure is defining a
mechanical model that accurately represents the physical problem. Theoretically, all
U
structures possess an infinite number of degrees of freedom (DOF). In other words, an
infinite number of independent spatial coordinates are required to completely specify
the position of all points on the structure at any instant of time (Craig, 1981). However,
most practical analyses are conducted on mechanical models having a finite number of
DOF. For each DOF exhibited by a structure, there exists a natural frequency (or natural
period) of vibration. For each natural frequency, the structure vibrates in a particular
mode of vibration.
For most large, complex structures, however, it is not necessary to determine all the
system natural frequencies, since relatively few of these vibration modes contribute
appreciably to the dynamic response. Therefore, the mechanical model should be
defined in such a manner that only those vibration modes that significantly contribute to
the dynamic response are accurately represented.
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
In general, the mechanical model can be categorized as either continuous or discrete.
The type of mechanical model employed for an analysis affects the nature of the
governing differential equations and their subsequent solution. For a continuous model,
the mathematical formulation of the problem results in a system of partial differential
equations. However, for a discrete system the mathematical formulation yields a set of
ordinary differential equations, one for each DOF. Analytical solutions for partial
differential equations and for large systems of ordinary differential equations are quite
cumbersome, if not impossible in many cases. Therefore, in most practical applications
numerical solution techniques must be employed. The focus of this chapter is the
dynamic analysis of discrete systems.
2. Vibration of Single Degree of Freedom Systems
2.1. Basic Concepts
S
Vibrations are generally classified as either free vibrations or forced vibrations. Free
R
vibration occurs in the absence of externally applied forces. The impetus for the free
AP S
vibration is usually an initial displacement and/or velocity imparted to the mass. A
TE
H S
system undergoing free vibration will oscillate at one or more of its natural frequencies.
A single degree of freedom (SDOF) system has only one natural frequency.
C OL
Forced vibration occurs under the excitation of externally applied forces. If the
excitation is transient (i.e., of short duration), the system response is at its natural
E -E
frequency (once the disturbance terminates). However, if the excitation is oscillatory
(periodically repetitive) and continues with time, the system vibrates at the excitation
frequency. In situations where the excitation frequency coincides with the natural
PL O
frequency of the system, a condition known as resonance occurs. At resonance, the
amplitude of vibration becomes extremely large, and damage to the system is imminent
M SC
if the vibration continues at the resonant frequency.
All structures exhibit some form of energy dissipation, or damping. Typically, the
SA NE
energy dissipation is due to frictional resistance or material hysteresis. In most practical
engineering structures and mechanical systems, the damping is relatively small and,
therefore, has very little influence on the natural frequency. However, even a small level
U
of damping has a significant effect in limiting the amplitude of vibration, especially at
resonance.
This section addresses the free vibration and harmonically excited forced vibration of
undamped and viscously damped SDOF systems.
2.2. Formulation of the Equation of Motion
The dynamic response of a discrete SDOF system is described by a single, second-order
ordinary differential equation. This mathematical expression, which defines the
dynamic equilibrium of a system, is called the equation of motion of the structure. An
important result from the solution of the equation of motion is the displacement-time
history of a structure subjected to a prescribed time-varying load. However, before
establishing methodologies for formulating the equations of motion for SDOF systems,
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
it is important to define the basic components comprising the vibrating system. These
include mass, stiffness, damping, and forcing. Damping is the energy loss mechanism,
and forcing is the source of excitation.
The mechanical model for a simple SDOF vibrating system is depicted in Figure 4. It
consists of a rigid body of mass m , constrained to move in only one translational
direction, whose position is completely defined by the single displacement coordinate
x . A spring of constant stiffness k , fixed at one end and attached at the other end to the
mass, provides elastic resistance to displacement. The energy dissipation mechanism is
represented by a damper or dashpot having a damping coefficient c . The external
excitation to the system is provided by the time-varying force F t . Vibration in the
absence of externally applied forces is also possible. Such vibration is referred to as free
vibration.
S
R
AP S
TE
H S
C OL
E -E
Figure 4. Mechanical model for a simple SDOF system
PL O
The displacement of the mass is measured from its static equilibrium position and is
M SC
defined as a function of time by the spatial coordinate x t . The motion of the mass is
resisted by the force Fs that develops in the spring and is defined by
SA NE
Fs kx (1)
where k is the spring constant. The units of k are generally defined as force per
U
distance (e.g., pounds per inch, lb/in, or Newtons per meter, N/m). The relationship
between the deformation in the spring and the force in the spring is illustrated in Figure
5. For a completely elastic system, the spring serves as an energy storage device. The
energy stored in the spring is called the strain energy, or potential energy, of the system.
The strain energy V is calculated as the area under the force-displacement curve of the
spring and is given by
1 2
V kx (2)
2
A conservative system will continue to vibrate indefinitely even after the external
excitation has ceased. However, all practical structures exhibit energy dissipation, or
damping, that prevents this from happening. Damping is a very complex phenomenon
for which numerous analytical models exist to describe its effect. The most commonly
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
employed analytical damping model is the linear viscous dashpot model (Beards, 1983).
The damping force FD is proportional to the velocity x of the mass and is given by
FD cx (3)
where c is the viscous damping coefficient having units of pound-seconds per inch (lb-
sec/in) or Newton-seconds per meter (N-sec/m).
S
R
AP S
TE
H S Figure 5. Force-deformation relationship for a linear spring
C OL
It was mentioned in Section 1 that the primary feature distinguishing a dynamic
problem from the corresponding static problem was the presence of inertia forces in a
vibrating system. The inertia force FI is the product of the mass and the acceleration of
E -E
the mass x and is given by
PL O
FI mx (4)
M SC
The negative sign indicates that the inertial force opposes the acceleration of the mass.
D’Alembert’s principle of dynamic equilibrium is a convenient method for establishing
SA NE
the equations of motion for simple SDOF and MDOF systems. It essentially involves
invoking Newton’s second law of motion to the system. Newton’s second law states
that the rate of change of momentum is proportional to the applied force and occurs
along the line of action of the force. For a constant mass, the rate of change of
U
momentum is equal to the product of the mass and its acceleration.
A free-body diagram of the SDOF system illustrated in Figure 4 is shown in Figure 6.
The expression for dynamic equilibrium, using d’Alembert’s principle, is given by
forces x
mx 0 (5)
Figure 6. Free-body diagram for SDOF system
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
Thus, by introducing the appropriate inertial force, it can be reasoned that the applied
force on the mass is in equilibrium with the inertia force. Therefore, the dynamic
problem is reduced to an equivalent problem of statics. Applying Eq. (5) to the free-
body diagram in Figure 6 results in the equation of motion for the system:
F t kx cx mx 0 (6)
or
mx cx kx F t (7)
Dividing Eq. (7) through by m results in
c k F t
S
x x x (8)
m m m
R
or
AP S
TE
H S
c F t
C OL
x x 2 x (9)
m m
where the term is called the natural circular frequency of the system, with units of
E -E
radians per second, and is given by
PL O
k
(10)
M SC
As illustrated by Eq. (10), the natural frequency is defined solely by the system’s mass
and stiffness characteristics. Natural frequency plays a vital role in vibration analysis
SA NE
and will be referred to extensively throughout the chapter.
-
U
-
-
TO ACCESS ALL THE 69 PAGES OF THIS CHAPTER,
Visit: http://www.eolss.net/Eolss-sampleAllChapter.aspx
Bibliography
Anderson, J. C. (1989). Dynamic response of buildings. The Seismic Design Handbook (ed. F. Naeim),
Chapter 3. NewYork: Van Nostrand Reinhold. [This chapter presents basic theory and procedures for
analysis of buildings subjected to dynamic loads].
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
Beards, C. F. (1983). Structural Vibration Analysis: Modelling, Analysis and Damping of Vibration
Structures, 153 pp.
New York: Wiley. [This books presents approaches for modeling and analysis of structures subjected to
vibrations and discussed damping of structural vibrations].
Clough, R. W. and Penzien, J. (1975). Dynamics of Structures, 634 pp. New York: McGraw-Hill. [A
classic textbook on theory and principles of structural dynamics including random vibrations and
earthquake engineering].
Craig, R. R. (1981). Structural Dynamics, An Introduction to Computer Methods, 544 pp. New York:
Wiley. [Provides basic material needed to use structural dynamics computer programs and to do structural
dynamics testing. Introduces the numerical techniques underlying finite element computer codes].
Di Julio, R. M. (1989). Static lateral-force procedure. The Seismic Design Handbook, (ed. F. Naeim),
Chapter 4. New
York: Van Nostrand Reinhold. [This chapter summarizes the static procedure in design codes for seismic
design of structures].
S
Housner, G. W. (1970). Design spectrum. Earthquake Engineering, (ed. R. L. Weigel), Chapter 5.
Englewood Cliffs,
R
AP S
NJ, USA: Prentice Hall. [The concept of the response spectrum and its extension to the development of
the seismic design spectrum is discussed].
TE
H S
Housner, G. W. (1959). Behavior of structures during earthquakes. Journal of the Engineering Mechanics
Division, ASCE, 85(EM4), 109-129. [This paper introduces early concepts for developing a design
C OL
spectrum for design of structures]
Hudson, D. E. (1962). Some problems in the application of spectrum techniques to strong motion
earthquake analysis. Bulletin of the Seismological Society of America, 52, pp. 417-430. [The relationship
E -E
between the response spectrum and the Fourier spectrum is developed, and a comparison as to suitability
for earth-quake engineering problems is given]
Hutton, D. V. (1981). Applied Mechanical Vibrations. New York: McGraw Hill. [A fundamental
PL O
textbook on concepts and procedures in analysis of mechanical vibrations]
M SC
Irvine, H. M. (1986). Structural Dynamics for the Practicing Engineer, 224 pp. Boston, MA, USA: Allyn
and Unwin. [The aim of this concise book is to demonstrate to practising engineers and advanced students
that the dynamic response of structural systems can be understood without advanced techniques of
analysis and impenetrable detail]
SA NE
Krauthammer, T. (2008a). Modern Protective Structures, 509 pp. New York: CRC Press. [Tackling the
analytical, design, assessment, and hazard mitigation issues associated with short-duration dynamic loads,
this book examines how impulsive loads affect various types of buildings and facilities]
Krauthammer, T., and Tedesco, J.W. (2008). A multihazard approach to insure resilient urban structure,"
U
Resilience ofCities to Terrorist and Other Threats, 545 pp (ed. H.J Pasman and I.A. Kirillov). New York:
Springer-Verlag. [This paper provides background on a multihazard research approach for protecting
urban infrastructures systems]
Krauthammer, T. (2008b). Critical infrastructure protection for multi hazard conditions, Sicherheit in
Technik und Gesellschaft (ed. A. Lehmann), Chapter 3. Munich, Germany: University of the Armed
Forces. [This chapter discusses concepts and issues in the protection of critical infrastructure under
multiple hazards]
Krauthammer, T., Astarlioglu, S., and Blasko, J.R. (2008). Pressure-impulse diagrams for the behavior
assessment ofstructural components, International Journal of Impact Engineering, Vol. 35, No. 8, pp.
771-783. [Theoretical and numerical methods for deriving pressure–impulse (P–I) diagrams for structural
elements subjected to transient loads are described in this paper]
Mohraz, B. and Elghadamsi, F. E. (1989). Earthquake ground motion and response spectra. The Seismic
Design Handbook (ed. F. Naeim), Chapter 2. New York: Van Nostrand Reinhold. [This chapter presents
information on the characteristics of earthquake ground motions and procedures for development of a
response spectrum for structural design].
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
Newmark, N. M. and Hall, W. J. (1982). Earthquake Spectra and Design, 103 pp. Berkeley, CA, USA:
Earthquake Engineering Research Institute.[A fundamental book that discussed basic concepts and
procedures to develop an earthquake response spectrum and its use in structural design]
Tauchert, T. R. (1974). Energy Principles in Structural Mechanics, 400 pp. New York: McGraw-Hill. [A
classical treatment wherein the relationships between stresses, strains or deformations, material
properties, and external effects are expressed in the form of energy or work done by internal and external
forces]
Tedesco, J. W., McDougal, W. G., Ross, W. A. (1999). Structural Dynamics: Theory and Applications,
816 pp., Englewood Cliffs, NJ, USA: Prentice Hall. [A textbook that provides readers with an
understanding of the dynamic response of structures and the analytical tools to determine such responses]
Thompson, W. T. and Dahleh, M. D. (1993).Theory of Vibration with Application, 5th ed, 534 pp. Upper
Saddle River, NJ: Prentice-Hall, Inc. [Fundamental book on theory of mechanical vibrations; this edition
features a new chapter on computational methods that presents the basic principles on which most modern
computer programs are developed]
S
Biographical Sketches
R
Dr. Tedesco is currently the Elizabeth D. Rockwell Dean of the Cullen College of Engineering,
AP S
University of Houston. He obtained his B.S. in Civil Engineering from the University of Notre Dame
TE
H S
(1971), M.S. in Civil Engineering from Tufts University (1974) and Ph.D. in Civil Engineering from
Lehigh University (1982).Professor Tedesco is a Registered Professional Engineer in the states of Florida
C OL
and Alabama and has over 38 years of diversified experience ranging from practical structural design to
highly mission oriented research projects. He has been principal investigator on more than thirty federally
funded research projects involving the dynamic response of structures and materials to high intensity,
short duration impulse loadings, including blast and impact. He is a six time U.S. Air Force research
fellow, and has worked in residence at several AFRL’s, including Tyndall AFB and Eglin AFB. Dr.
E -E
Tedesco has been involved in research involving highly nonlinear numerical simulations of structures and
materials subject to blast and impact loading, experimental research to assess the dynamic response
PL O
characteristics of a variety of construction materials, and explosive tests of full-scale building structures.
Dr. Tedesco is a member of the American Society of Civil Engineers (ASCE), the American Concrete
Institute (ACI), and is a Charter Member of the Structural Engineering Institute (SEI).He is member of
M SC
the ASCE Committee on Blast, Shock and Vibratory Effects and the ACI Committee on Short Duration
Dynamics and Vibratory Load Effects. He is also the past chairman of the ASCE Technical
Administrative Committee (TAC) on Dynamic Effects. Dr. Tedesco is past Managing Editor of the ASCE
Journal of Structural Engineering and Associate Editor of the International Journal of Computers and
SA NE
Structures. Dr. Tedesco’s teaching background includes courses on structural design, structural analysis
and structural dynamics. He has written more than 110 technical publications including 70 refereed
articles, 4 books, 2 book chapters and 38 technical reports. He is the principal author of the internationally
renowned textbook titled Structural Dynamics: Theory and Applications (Prentice Hall, 1999).
U
Dr. Krauthammer is currently Theodore R. Crom Professor of Civil Engineering at the University of
Florida, and Director of the Center for infrastructure Protection and Physical Security (CIPPS).
Previously, he was Professor of Civil Engineering at the Pennsylvania State University, and the founding
Director of the Protective Technology Center (PTC). He obtained his Ph.D. in Civil Engineering from the
University of Illinois at Urbana-Champaign. His main research and technical activities are directed at
structural behavior under severe dynamic loads, including considerations of both survivability and
fragility aspects of facilities subjected to blast, shock, and impact effects. He has specialized in the
nonlinear behavior of structures (including medium-structure interaction) under impulsive loads, and the
development of numerical simulations and testing techniques for structural assessment. His work has
included the development of design recommendations for enhancing structural performance, physical
security and safety of buildings, facilities and systems. Dr. Krauthammer is a Fellow of the American
Concrete Institute (ACI), a Life Member of the American Society of Civil Engineers (ASCE), a member
of the American Institute of Steel Construction (AISC), and is involved with other national and
international professional organizations. He serves on ten technical committees of ASCE, ACI, and AISC.
Dr. Krauthammer was Chair of the ASCE/SEI Committee of Blast, Shock, and Impact Effects, and the
©Encyclopedia Life Support Systems (EOLSS)
STRUCTURAL ENGINEERING AND GEOMECHANICS - Vol. II - Structural Dynamics - J. W. Tedesco, T. Krauthammer
ASCE Task Committee on Structural Design for Physical Security. Also, he was the founding Chair of
ACI Committee 370 on Short Duration Dynamics and Vibratory Load Effects, Chair of the ASCE
Engineering Mechanics Committee on Experimental Analysis and Instrumentation and of the ACI
Committee 444 Experimental Analysis of Concrete Structures, and of the Joint ACI-ASCE Committee
421 on Design of Reinforced Concrete Slabs. He was a member of the National Research Council
Defensive Architecture Committee. Dr. Krauthammer is the author of the book “Modern Protective
Structures” that was published in 2008, and has written more than 470 research publications. Dr.
Krauthammer's teaching background includes courses on structural design and behavior, structural
analysis, advanced dynamics, protective structures, and numerical methods. He is very active in
organizing cooperative international scientific, technical, and engineering education activities. Dr
Krauthammer has been invited to lecture in the USA and abroad, and he has been a consultant to industry
and governments in the USA and abroad.
S
R
AP S
TE
H S
C OL
E -E
PL O
M SC
SA NE
U
©Encyclopedia Life Support Systems (EOLSS)
You might also like
- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 MarksNo ratings yet053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks22 pages
- A Review of Blast and Impact of Metallic and Sandwich StructuresNo ratings yetA Review of Blast and Impact of Metallic and Sandwich Structures10 pages
- Structural Dynamics, Therefore, Is A Type ofNo ratings yetStructural Dynamics, Therefore, Is A Type of5 pages
- Introduction: The Need For Displacement-Based Seismic DesignNo ratings yetIntroduction: The Need For Displacement-Based Seismic Design186 pages
- CE 73 Basic Dynamics and Aseismic DesignNo ratings yetCE 73 Basic Dynamics and Aseismic Design32 pages
- Cyclic Demand Spectrum: Earthquake Engineering & Structural Dynamics July 2002No ratings yetCyclic Demand Spectrum: Earthquake Engineering & Structural Dynamics July 200218 pages
- Chapter-1 Equations of Motion, Problem Statement, and Solution MethodsNo ratings yetChapter-1 Equations of Motion, Problem Statement, and Solution Methods15 pages
- Survey On Damage Mechanics Models For Fatigue Life PredictionNo ratings yetSurvey On Damage Mechanics Models For Fatigue Life Prediction36 pages
- Behavior of Reinforced Concrete Columns Under Combined Effects of Axial and Blast-Induced Transverse LoadsNo ratings yetBehavior of Reinforced Concrete Columns Under Combined Effects of Axial and Blast-Induced Transverse Loads9 pages
- Experimental and Theoretical Dynamic System Identification of Damaged RC BeamsNo ratings yetExperimental and Theoretical Dynamic System Identification of Damaged RC Beams11 pages
- A New Contact Force Model For Low Coefficient of Restitution Impact - ASME Applied Mechanics - Vol. 79 - Pp. 064506 - 2012No ratings yetA New Contact Force Model For Low Coefficient of Restitution Impact - ASME Applied Mechanics - Vol. 79 - Pp. 064506 - 20125 pages
- Fatigue LifA State-Of-The-Art Review On Fatigue Life Prediction Methods For Metal StructuresNo ratings yetFatigue LifA State-Of-The-Art Review On Fatigue Life Prediction Methods For Metal Structures14 pages
- Structural Dynamics of Earthquake Resistant BuildingsNo ratings yetStructural Dynamics of Earthquake Resistant Buildings13 pages
- 05- VAN DER PLUIJM & MARSHAK - Earth Structure Introduction to Structural Geology and TectonicsNo ratings yet05- VAN DER PLUIJM & MARSHAK - Earth Structure Introduction to Structural Geology and Tectonics22 pages
- Short-Term Earthquake Forecasting Using Early Aftershock StatisticsNo ratings yetShort-Term Earthquake Forecasting Using Early Aftershock Statistics16 pages
- Class Note Dynamics of Structures by Dr. PrakashNo ratings yetClass Note Dynamics of Structures by Dr. Prakash21 pages
- A Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To EarthquakesNo ratings yetA Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To Earthquakes11 pages
- Introduction To Finite Elements (Matrix Methods)No ratings yetIntroduction To Finite Elements (Matrix Methods)46 pages
- Computational Modelling of Damage Behaviour of Reinforced Concrete Slabs Subjected To Blast LoadingNo ratings yetComputational Modelling of Damage Behaviour of Reinforced Concrete Slabs Subjected To Blast Loading8 pages
- Chapter 04-Dynamic Response of Buildings PDFNo ratings yetChapter 04-Dynamic Response of Buildings PDF64 pages
- Advancements in Statnamic Data Regression TechniquesNo ratings yetAdvancements in Statnamic Data Regression Techniques17 pages
- Module 1: Introduction: Review of Basic Concepts in Mechanics Lecture 1: IntroductionNo ratings yetModule 1: Introduction: Review of Basic Concepts in Mechanics Lecture 1: Introduction19 pages
- Evaluation of Impact Models For Seismic Pounding: 13 World Conference On Earthquake EngineeringNo ratings yetEvaluation of Impact Models For Seismic Pounding: 13 World Conference On Earthquake Engineering11 pages
- Lecture Notes - Linear Elasticity TheoryNo ratings yetLecture Notes - Linear Elasticity Theory43 pages
- A State-of-Knowledge Review On The Endurance Time MethodNo ratings yetA State-of-Knowledge Review On The Endurance Time Method25 pages
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3No ratings yet
- Zero Point Energy Per Stereo Radian and the Distribution of Gravitational Acceleration of Planets Throughout the Solar System.: The Origin and Cause of GravitationFrom EverandZero Point Energy Per Stereo Radian and the Distribution of Gravitational Acceleration of Planets Throughout the Solar System.: The Origin and Cause of GravitationNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4No ratings yet
- Brawn Laboratories Limited: Standard Operating ProcedureNo ratings yetBrawn Laboratories Limited: Standard Operating Procedure4 pages
- Experimental and Numerical Study On CO2 Absorption Mass TransferNo ratings yetExperimental and Numerical Study On CO2 Absorption Mass Transfer13 pages
- Radio Propagation Channel Model Tuning - Mentum50% (2)Radio Propagation Channel Model Tuning - Mentum22 pages
- Limits Continuity and Differentiability GATE Study Material in PDFNo ratings yetLimits Continuity and Differentiability GATE Study Material in PDF9 pages
- Analysis of Rectangular Thin Plates by Using Finite Difference MethodNo ratings yetAnalysis of Rectangular Thin Plates by Using Finite Difference Method8 pages
- Plyometric Training and Distance RunningNo ratings yetPlyometric Training and Distance Running8 pages
- Shear Strength - Introduction and Shear StrengthTesting100% (1)Shear Strength - Introduction and Shear StrengthTesting76 pages
- Mekanika Fluida I (Fluid Mechanics) : Oleh Ir. H. Nefli Yusuf, M.EngNo ratings yetMekanika Fluida I (Fluid Mechanics) : Oleh Ir. H. Nefli Yusuf, M.Eng29 pages
- Which Is The Right Reference Surface Compression Value For Heat Treated GlassNo ratings yetWhich Is The Right Reference Surface Compression Value For Heat Treated Glass10 pages
- 10th Radiology Residents HOT SEAT Review CourseNo ratings yet10th Radiology Residents HOT SEAT Review Course8 pages
- Modeling and Control of A Distributed Generation SystemNo ratings yetModeling and Control of A Distributed Generation System24 pages
























































































- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks
- A Review of Blast and Impact of Metallic and Sandwich StructuresA Review of Blast and Impact of Metallic and Sandwich Structures
- Introduction: The Need For Displacement-Based Seismic DesignIntroduction: The Need For Displacement-Based Seismic Design
- Cyclic Demand Spectrum: Earthquake Engineering & Structural Dynamics July 2002Cyclic Demand Spectrum: Earthquake Engineering & Structural Dynamics July 2002
- Chapter-1 Equations of Motion, Problem Statement, and Solution MethodsChapter-1 Equations of Motion, Problem Statement, and Solution Methods
- Survey On Damage Mechanics Models For Fatigue Life PredictionSurvey On Damage Mechanics Models For Fatigue Life Prediction
- Behavior of Reinforced Concrete Columns Under Combined Effects of Axial and Blast-Induced Transverse LoadsBehavior of Reinforced Concrete Columns Under Combined Effects of Axial and Blast-Induced Transverse Loads
- Experimental and Theoretical Dynamic System Identification of Damaged RC BeamsExperimental and Theoretical Dynamic System Identification of Damaged RC Beams
- A New Contact Force Model For Low Coefficient of Restitution Impact - ASME Applied Mechanics - Vol. 79 - Pp. 064506 - 2012A New Contact Force Model For Low Coefficient of Restitution Impact - ASME Applied Mechanics - Vol. 79 - Pp. 064506 - 2012
- Fatigue LifA State-Of-The-Art Review On Fatigue Life Prediction Methods For Metal StructuresFatigue LifA State-Of-The-Art Review On Fatigue Life Prediction Methods For Metal Structures
- Structural Dynamics of Earthquake Resistant BuildingsStructural Dynamics of Earthquake Resistant Buildings
- 05- VAN DER PLUIJM & MARSHAK - Earth Structure Introduction to Structural Geology and Tectonics05- VAN DER PLUIJM & MARSHAK - Earth Structure Introduction to Structural Geology and Tectonics
- Short-Term Earthquake Forecasting Using Early Aftershock StatisticsShort-Term Earthquake Forecasting Using Early Aftershock Statistics
- A Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To EarthquakesA Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To Earthquakes
- Computational Modelling of Damage Behaviour of Reinforced Concrete Slabs Subjected To Blast LoadingComputational Modelling of Damage Behaviour of Reinforced Concrete Slabs Subjected To Blast Loading
- Advancements in Statnamic Data Regression TechniquesAdvancements in Statnamic Data Regression Techniques
- Module 1: Introduction: Review of Basic Concepts in Mechanics Lecture 1: IntroductionModule 1: Introduction: Review of Basic Concepts in Mechanics Lecture 1: Introduction
- Evaluation of Impact Models For Seismic Pounding: 13 World Conference On Earthquake EngineeringEvaluation of Impact Models For Seismic Pounding: 13 World Conference On Earthquake Engineering
- A State-of-Knowledge Review On The Endurance Time MethodA State-of-Knowledge Review On The Endurance Time Method
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common Problems
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3
- Zero Point Energy Per Stereo Radian and the Distribution of Gravitational Acceleration of Planets Throughout the Solar System.: The Origin and Cause of GravitationFrom EverandZero Point Energy Per Stereo Radian and the Distribution of Gravitational Acceleration of Planets Throughout the Solar System.: The Origin and Cause of Gravitation
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4
- Brawn Laboratories Limited: Standard Operating ProcedureBrawn Laboratories Limited: Standard Operating Procedure
- Experimental and Numerical Study On CO2 Absorption Mass TransferExperimental and Numerical Study On CO2 Absorption Mass Transfer
- Limits Continuity and Differentiability GATE Study Material in PDFLimits Continuity and Differentiability GATE Study Material in PDF
- Analysis of Rectangular Thin Plates by Using Finite Difference MethodAnalysis of Rectangular Thin Plates by Using Finite Difference Method
- Shear Strength - Introduction and Shear StrengthTestingShear Strength - Introduction and Shear StrengthTesting
- Mekanika Fluida I (Fluid Mechanics) : Oleh Ir. H. Nefli Yusuf, M.EngMekanika Fluida I (Fluid Mechanics) : Oleh Ir. H. Nefli Yusuf, M.Eng
- Which Is The Right Reference Surface Compression Value For Heat Treated GlassWhich Is The Right Reference Surface Compression Value For Heat Treated Glass
- Modeling and Control of A Distributed Generation SystemModeling and Control of A Distributed Generation System