Cam and Follower Notes 2018 PDF
Cam and Follower Notes 2018 PDF
Download as pdf or txt
You might also like
- Mechanical Draughting N4 QP Aug 2019Document9 pagesMechanical Draughting N4 QP Aug 2019patel.ayushl2018No ratings yet
- Ied 136 Sectional View WorksheetDocument2 pagesIed 136 Sectional View WorksheetMadison BurgessNo ratings yet
- Online Solidworks TrainingDocument4 pagesOnline Solidworks TrainingJaneth AbadNo ratings yet
- Cams and LociDocument15 pagesCams and LociAnonymous hlRLVcMNo ratings yet
- Some Important Terms:: Isometric Axes, Lines and PlanesDocument10 pagesSome Important Terms:: Isometric Axes, Lines and PlanesAnand BabuNo ratings yet
- Matching of Multibody Dynamic Simulation and Experiment of A Drum-Type Washing MachineDocument5 pagesMatching of Multibody Dynamic Simulation and Experiment of A Drum-Type Washing MachinespartaussNo ratings yet
- Past Papers Questions 5054/2 & 4 Unit 8Document60 pagesPast Papers Questions 5054/2 & 4 Unit 8Ifrah ImranNo ratings yet
- 19010364-SC - B00 NICE900 Door Drive User Manual For PMSM Distance Control - 201704Document29 pages19010364-SC - B00 NICE900 Door Drive User Manual For PMSM Distance Control - 201704Ks Bharathiyar90% (10)
- Orthographic Projections - Technical DrawingDocument24 pagesOrthographic Projections - Technical DrawingEndalkNo ratings yet
- Technical DrawingDocument38 pagesTechnical DrawingKinfe MehariNo ratings yet
- Technical DrawingDocument15 pagesTechnical DrawingChristian Patrice100% (1)
- Development of SurfacesDocument19 pagesDevelopment of SurfacesInderpreet Singh Ahuja100% (1)
- DEMONSTRATION - Const. of A HelixDocument2 pagesDEMONSTRATION - Const. of A HelixNitin B maske100% (1)
- Experiment Fi1 PDFDocument33 pagesExperiment Fi1 PDFrajamanickam sNo ratings yet
- 1.2 Involutes - Question Bank and SolutionsDocument4 pages1.2 Involutes - Question Bank and SolutionsMartin De Boras PragashNo ratings yet
- Technical Drawing SS3Document36 pagesTechnical Drawing SS3Moyo DaviesNo ratings yet
- 3 View Orthographic DrawingDocument3 pages3 View Orthographic DrawingMuhammad FitriNo ratings yet
- Letc 12 Missing ViewsDocument24 pagesLetc 12 Missing ViewsS.M.Abbas Zadi.67% (6)
- Intersection of Solid Ss2 NoteDocument2 pagesIntersection of Solid Ss2 NoteJohn EgbongNo ratings yet
- Ss1 Technical Drawing Lesson Plan Week 1Document7 pagesSs1 Technical Drawing Lesson Plan Week 1Joy OramaNo ratings yet
- Engg Drawing Viva QuestionsDocument8 pagesEngg Drawing Viva Questionsmahdzia0% (1)
- DME - Production Drawing - Previous Question PaperDocument4 pagesDME - Production Drawing - Previous Question PaperMrHEMAMAHEH0% (1)
- Chapter 8: Geometrical Measurements: Auto CollimatorDocument17 pagesChapter 8: Geometrical Measurements: Auto CollimatorRaghu KrishnanNo ratings yet
- drwing-IIT Que-1 PDFDocument14 pagesdrwing-IIT Que-1 PDFNur Alam100% (1)
- Engineering Drawing. Assignment PDFDocument28 pagesEngineering Drawing. Assignment PDFAsif KhanzadaNo ratings yet
- Key Way 8 X 3.5 2 1 4Document2 pagesKey Way 8 X 3.5 2 1 4Allen ChandlerNo ratings yet
- CAMD QuestionsDocument3 pagesCAMD QuestionsN Dhanunjaya Rao Borra100% (1)
- Dimensioning:: Engineering DrawingDocument8 pagesDimensioning:: Engineering DrawingDarshit DesaiNo ratings yet
- Engineering-Curves 1Document17 pagesEngineering-Curves 1api-327264533No ratings yet
- Engineering DrawingDocument3 pagesEngineering DrawingLeonel ZurbitoNo ratings yet
- Eg07 Section ViewsDocument10 pagesEg07 Section ViewsHasmaye PintoNo ratings yet
- Level 9 - Technical DrawingDocument30 pagesLevel 9 - Technical Drawingh1n4t4xn4rut0No ratings yet
- Workshop Technology NotesDocument44 pagesWorkshop Technology NotesGeoffreyNo ratings yet
- Carburetor TypesDocument24 pagesCarburetor TypesHAMZA YOUSAFNo ratings yet
- Intersectionofregularsolids GeometricDrawing JoshuaNavaArts 1675717424054Document48 pagesIntersectionofregularsolids GeometricDrawing JoshuaNavaArts 1675717424054Jafar EarlNo ratings yet
- 1.engineering Drawing Short Questions - Line (Geometry) - Angle PDFDocument1 page1.engineering Drawing Short Questions - Line (Geometry) - Angle PDFsandeep kumarNo ratings yet
- Types of Jigs & Fixtures PDFDocument3 pagesTypes of Jigs & Fixtures PDFABEESH KIRANNo ratings yet
- Auxiliary View: EGM 2161 Engineering Drawing 2-Mechanical EngineeringDocument2 pagesAuxiliary View: EGM 2161 Engineering Drawing 2-Mechanical EngineeringLim AndrewNo ratings yet
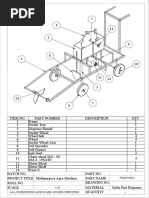
- Agro Machine Drawing PDFDocument1 pageAgro Machine Drawing PDFsabhari_ramNo ratings yet
- Conjugate Tooth-1-2 PDFDocument8 pagesConjugate Tooth-1-2 PDFHarshavardhan Kutal100% (1)
- Computer Aided Machine Drawing Paper 3Document4 pagesComputer Aided Machine Drawing Paper 3Nishan HegdeNo ratings yet
- V2 ECU For AMT TurbinesDocument26 pagesV2 ECU For AMT TurbinesAmin Anjom100% (1)
- Eg 2Document316 pagesEg 2Jivanthika VarrunkumarNo ratings yet
- Section of SolidsDocument49 pagesSection of SolidsRavi Kiran NandyalaNo ratings yet
- Engineering Drawing Module 7Document8 pagesEngineering Drawing Module 7Aldrin VillanuevaNo ratings yet
- SDLP - Engineering Drawing InstrumentDocument6 pagesSDLP - Engineering Drawing InstrumentAnne Anne Cabeltis-MañaboNo ratings yet
- Unit-3 CAD CompletedDocument35 pagesUnit-3 CAD CompletedmuthupuviNo ratings yet
- 201886663-Technical-Drawing-Y1 (1) 908Document207 pages201886663-Technical-Drawing-Y1 (1) 908Russell francis o. Mañago100% (2)
- Chapter-14: Development of Surfaces of SolidsDocument16 pagesChapter-14: Development of Surfaces of SolidsVikas ChaudhariNo ratings yet
- 04 - Abrasive Machining & Finishing OperationsDocument80 pages04 - Abrasive Machining & Finishing OperationsAbdul Moiz0% (1)
- Technical Drawing SchemeDocument14 pagesTechnical Drawing Schemecosmos olusegunNo ratings yet
- CAD & Engineering DrawingDocument51 pagesCAD & Engineering DrawingTravel & tourism100% (1)
- ME83691-Computer Aided Design and ManufacturingDocument15 pagesME83691-Computer Aided Design and Manufacturingraman thiru55No ratings yet
- MFT2 Lab 2Document48 pagesMFT2 Lab 2dellibabu509No ratings yet
- Drawing Book - First Year Technical DrawingDocument138 pagesDrawing Book - First Year Technical DrawingSamson ManyanyeNo ratings yet
- Kinematics of MachineryDocument8 pagesKinematics of MachineryILAYAPERUMAL KNo ratings yet
- Welding and Fabrication Level 5Document103 pagesWelding and Fabrication Level 5nivlekespinosaNo ratings yet
- Unit III Surface ModellingDocument24 pagesUnit III Surface ModellingSuhasNo ratings yet
- 3 Lab Manual EGD 3110013 Odd 2020Document31 pages3 Lab Manual EGD 3110013 Odd 2020ohmi bhaernallNo ratings yet
- Engineering DRG I 2072Document21 pagesEngineering DRG I 2072santoNo ratings yet
- First Angle and Third Angle Orthographic Projection (2,3,2.4,2.5,2.6)Document10 pagesFirst Angle and Third Angle Orthographic Projection (2,3,2.4,2.5,2.6)Sajjad Ali Sahito100% (1)
- Graphic Expression and Communication: in This Unit You Will Learn The Answers To These QuestionsDocument24 pagesGraphic Expression and Communication: in This Unit You Will Learn The Answers To These QuestionsEduardo u100% (2)
- Cam and Follower Final NotesDocument18 pagesCam and Follower Final NotesSexy IdolNo ratings yet
- AP Physics 1-Syllabus 2023-24Document12 pagesAP Physics 1-Syllabus 2023-24SreshthaNo ratings yet
- Chapter 2 Kinematic in 1D (Part 2) (PHY 130)Document16 pagesChapter 2 Kinematic in 1D (Part 2) (PHY 130)FiqajasmeNo ratings yet
- Test+V1+FyBNVC07+Ch+5 7+circular Rotational+Motion,+Energy,+Document5 pagesTest+V1+FyBNVC07+Ch+5 7+circular Rotational+Motion,+Energy,+Epic WinNo ratings yet
- Notes - Topic 6 Further Mechanics - Edexcel Physics A-LevelDocument7 pagesNotes - Topic 6 Further Mechanics - Edexcel Physics A-LevelBob Jones100% (1)
- Linear Motion LessonDocument6 pagesLinear Motion LessonSalmizam IzamNo ratings yet
- Course Outline DJJ40163 Sesi 2 2023 - 2024Document4 pagesCourse Outline DJJ40163 Sesi 2 2023 - 2024Mohd Shahrom IsmailNo ratings yet
- Exam 1 Study Guide - PHYS 121 - Spring 2019 - Dr. Goolsby-ColeDocument4 pagesExam 1 Study Guide - PHYS 121 - Spring 2019 - Dr. Goolsby-ColeC G-CNo ratings yet
- Solved QuestionsDocument14 pagesSolved QuestionsKaran JeetNo ratings yet
- Vectors in Two Dimensions: What Is A Vector?Document13 pagesVectors in Two Dimensions: What Is A Vector?Lazarus MukwekweNo ratings yet
- FormulariumDocument7 pagesFormulariumKamilNo ratings yet
- Chapter 1 Sceince 1Document22 pagesChapter 1 Sceince 1Subham Bhadigar100% (2)
- Ieep 109Document3 pagesIeep 109ShubhamNo ratings yet
- Module 2Document8 pagesModule 2Ashner NovillaNo ratings yet
- lI4FIQgVSxGi0EKQ0UGd PDFDocument34 pageslI4FIQgVSxGi0EKQ0UGd PDFAhxhsNo ratings yet
- Mathematics (4024) - Paper - 1 - G12-Theory 124911Document16 pagesMathematics (4024) - Paper - 1 - G12-Theory 124911Spencer MakobaNo ratings yet
- Final Exam Mec420 Jan 2018 - s1 - AnswerDocument14 pagesFinal Exam Mec420 Jan 2018 - s1 - AnswerIrfan SyafiqNo ratings yet
- Chapter2Kinematics With Constant Accelerationin1dDocument12 pagesChapter2Kinematics With Constant Accelerationin1dnsbaruaoleNo ratings yet
- Proof of F MV - R - IOPSparkDocument4 pagesProof of F MV - R - IOPSparkjinkazamaNo ratings yet
- Cambridge Learner Guide For o Level PhysicsDocument50 pagesCambridge Learner Guide For o Level PhysicsAlekid ThunderNo ratings yet
- Unsteady Numerical Drag Estimation For A Pitching Non-Winged Reentry VehicleDocument8 pagesUnsteady Numerical Drag Estimation For A Pitching Non-Winged Reentry Vehiclemostafakhalil.mtcNo ratings yet
- COM Collision DPPDocument51 pagesCOM Collision DPPdiyaachhodawala100% (1)
- 1 General Physics PDFDocument39 pages1 General Physics PDFHakim Abbas Ali PhalasiyaNo ratings yet
- Sample Paper: Class: XI General InstructionsDocument8 pagesSample Paper: Class: XI General InstructionsShivam KumarNo ratings yet
- Phsics Solutions CH 4 2Document26 pagesPhsics Solutions CH 4 2Stephanie TeoNo ratings yet
- This Test Contains A Total of 10 Objective Type Questions. Each Question Carries 1 Mark. There Is NO NEGATIVE MarkingDocument19 pagesThis Test Contains A Total of 10 Objective Type Questions. Each Question Carries 1 Mark. There Is NO NEGATIVE Markingvarunkohliin100% (1)
- Chapter04 Work Energy and Power SDocument8 pagesChapter04 Work Energy and Power SeltytanNo ratings yet