ME 563 - Intermediate Fluid Dynamics - Su: Lecture 29 - Waves: More Basics
ME 563 - Intermediate Fluid Dynamics - Su: Lecture 29 - Waves: More Basics
Download as pdf or txt
You might also like
- DoobDocument8 pagesDoobDaoping YuNo ratings yet
- P113A Homework 5 Griffith's Quantum Mechanics, Prof. DenninDocument15 pagesP113A Homework 5 Griffith's Quantum Mechanics, Prof. DenninpalisonNo ratings yet
- Physcos cw5 Q3 v2Document1 pagePhyscos cw5 Q3 v2zcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 2 Dr. K. MalikDocument2 pagesSPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 2 Dr. K. Malikzcap excelNo ratings yet
- NR 2 Ventilation Effectiveness PDFDocument26 pagesNR 2 Ventilation Effectiveness PDFChristopher LloydNo ratings yet
- PVS 800 Inverter Falut TracingDocument3 pagesPVS 800 Inverter Falut TracingmillarsambasivamNo ratings yet
- Aerodynamics 01Document5 pagesAerodynamics 01Tulong ZhuNo ratings yet
- Notes On 1 Particle ScatteringDocument5 pagesNotes On 1 Particle ScatteringJuliana HarmatiukNo ratings yet
- Derivation of The Lorenz EquationsDocument3 pagesDerivation of The Lorenz EquationsSteven ScottNo ratings yet
- Harmonic Sections - Cotangent PDFDocument9 pagesHarmonic Sections - Cotangent PDFهشام الهنديNo ratings yet
- Solution To Exercises: A Breviary of Seismic TomographyDocument3 pagesSolution To Exercises: A Breviary of Seismic Tomographyrinzzz333No ratings yet
- Intro To SWE Textbook1Document9 pagesIntro To SWE Textbook1AKNo ratings yet
- Riemannian ManifoldsDocument17 pagesRiemannian ManifoldssardarpatelahirolaNo ratings yet
- Derivation of Navier Stokes Momentum EquationsDocument2 pagesDerivation of Navier Stokes Momentum EquationsFbgames StefNo ratings yet
- Cee235b Handout JacobianDocument4 pagesCee235b Handout JacobianNguyen DuyNo ratings yet
- 3.23 Electrical, Optical, and Magnetic Properties of MaterialsDocument7 pages3.23 Electrical, Optical, and Magnetic Properties of MaterialsFiras HamidNo ratings yet
- Riemann Surfaces HW 11 DefDocument2 pagesRiemann Surfaces HW 11 DefGuifré Sánchez SerraNo ratings yet
- Gatapov 2005Document8 pagesGatapov 2005KorcaNo ratings yet
- Parameter Id HBDocument3 pagesParameter Id HBalejandro.david1642No ratings yet
- Enhanced Eudml Content Accessible Layered PDF Eudml 262650 0Document15 pagesEnhanced Eudml Content Accessible Layered PDF Eudml 262650 0ozana.alencarNo ratings yet
- 1 HandoutDocument14 pages1 Handoutaladar520No ratings yet
- 5.1. Derivation of The Wave EquationDocument21 pages5.1. Derivation of The Wave EquationAlejandro RodriguezNo ratings yet
- Lecture19-Roger 136606Document8 pagesLecture19-Roger 136606brandonzhen02No ratings yet
- Tanvi QuaternionsDocument12 pagesTanvi QuaternionsFernandoNo ratings yet
- 2016 - Bourquard - CAPS Technical Note On Acoustic MeasurementsDocument26 pages2016 - Bourquard - CAPS Technical Note On Acoustic MeasurementslakaviyNo ratings yet
- Strings and 1D Wave Equation: Important Concepts/AssumptionsDocument17 pagesStrings and 1D Wave Equation: Important Concepts/AssumptionsOnur AkturkNo ratings yet
- Navier Stokes Solution IDocument3 pagesNavier Stokes Solution IdsanzjulianNo ratings yet
- Positive Periodic Solution To An Indefinite Singular EquationDocument7 pagesPositive Periodic Solution To An Indefinite Singular EquationWaqar HassanNo ratings yet
- Lecture One: Harmonic Functions and The Harnack InequalityDocument5 pagesLecture One: Harmonic Functions and The Harnack InequalityMuntazir MehdiNo ratings yet
- Week 7Document8 pagesWeek 7Gautham GiriNo ratings yet
- 3 HandoutDocument6 pages3 Handoutaladar520No ratings yet
- 2 The Real Scalar Field: L L L LDocument3 pages2 The Real Scalar Field: L L L LPero PericNo ratings yet
- Hartman-Grobman Theorem and Normal FormsDocument18 pagesHartman-Grobman Theorem and Normal FormslucassecoNo ratings yet
- Exercise 1. Solve The Linearized Governing Equations (Laplace and Bottom Boundary Condition, EquaDocument5 pagesExercise 1. Solve The Linearized Governing Equations (Laplace and Bottom Boundary Condition, EquaSwathi BDNo ratings yet
- A Note On Resolvent Convergence On A Thin Domain, Ricardo Parreira Da SilvaDocument8 pagesA Note On Resolvent Convergence On A Thin Domain, Ricardo Parreira Da SilvaFis MatNo ratings yet
- The Shallow Water EquationsDocument9 pagesThe Shallow Water EquationsM Usman Bin YounasNo ratings yet
- F2 NotesDocument11 pagesF2 Notessayandatta1No ratings yet
- HamiltonianDocument8 pagesHamiltonianSagar SinghNo ratings yet
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4Document10 pages2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4chejianglongNo ratings yet
- Further Wiener-Hopf DevelopmentsDocument10 pagesFurther Wiener-Hopf DevelopmentsalfonsoNo ratings yet
- Phy206 HW2Document6 pagesPhy206 HW2Simone SpallacciNo ratings yet
- The Heat and Wave Equations in 2D and 3DDocument39 pagesThe Heat and Wave Equations in 2D and 3DDavid PatricioNo ratings yet
- TautochroneDocument3 pagesTautochronePradip KumarNo ratings yet
- dg1 hw5 SolutionsDocument11 pagesdg1 hw5 Solutionschristophercabezas93No ratings yet
- Week 10Document14 pagesWeek 10sahlewel weldemichaelNo ratings yet
- Geometry BasicsDocument6 pagesGeometry BasicsMatthew RaymondNo ratings yet
- Maxwells Equation in TimeDocument11 pagesMaxwells Equation in TimehskapasiNo ratings yet
- Aco Pipe FEMDocument23 pagesAco Pipe FEMlapuNo ratings yet
- 3 Examples (Hamiltonian Formalism)Document14 pages3 Examples (Hamiltonian Formalism)juanNo ratings yet
- Analysis in Many Variables IIDocument17 pagesAnalysis in Many Variables IIA FryNo ratings yet
- 2 HandoutDocument6 pages2 Handoutaladar520No ratings yet
- Lecture 14Document4 pagesLecture 14mohinuddin12456No ratings yet
- Integralmodel BubbleplumeDocument7 pagesIntegralmodel BubbleplumeSimon BeelenNo ratings yet
- Lecture 5a Lateral Vibration of RodDocument9 pagesLecture 5a Lateral Vibration of RodMohammad Taha IrfanNo ratings yet
- P2 TensorsDocument4 pagesP2 TensorsSebastian hanNo ratings yet
- Mechanics Solutions 2Document2 pagesMechanics Solutions 2Argh AaarghNo ratings yet
- Finite Difference Modelling of The Full Acoustic Wave Equation in Matlab (REFERENCES)Document9 pagesFinite Difference Modelling of The Full Acoustic Wave Equation in Matlab (REFERENCES)Mikael Yuan EstuariwinarnoNo ratings yet
- Homework 7Document3 pagesHomework 7Luis EduardoNo ratings yet
- Special Evolution Lima PeruDocument43 pagesSpecial Evolution Lima PeruKaren VjNo ratings yet
- Kolmogorov ForwardDocument1 pageKolmogorov ForwardsuedesuedeNo ratings yet
- Cordoba-A Pointwise Inequality For Fractional LaplaciansDocument7 pagesCordoba-A Pointwise Inequality For Fractional LaplaciansmarceloNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and ApplicationsFrom EverandGreen's Function Estimates for Lattice Schrödinger Operators and ApplicationsNo ratings yet
- Functional Operators, Volume 2: The Geometry of Orthogonal SpacesFrom EverandFunctional Operators, Volume 2: The Geometry of Orthogonal SpacesNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Coursework Sheet 1 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Coursework Sheet 1 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 6 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 6 Dr. K. Malikzcap excelNo ratings yet
- Rel Lecture5Document8 pagesRel Lecture5zcap excelNo ratings yet
- PHY6311 Physical Cosmology, Spring 2016: Exercise Sheet 7 Dr. K. MalikDocument2 pagesPHY6311 Physical Cosmology, Spring 2016: Exercise Sheet 7 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 8 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 8 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 5 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 5 Dr. K. Malikzcap excelNo ratings yet
- Relativity NotesDocument80 pagesRelativity Noteszcap excelNo ratings yet
- SPA6311 Physical Cosmology Lecture 1: Introduction and A Map of The UniverseDocument18 pagesSPA6311 Physical Cosmology Lecture 1: Introduction and A Map of The Universezcap excelNo ratings yet
- Rel Lecture3Document9 pagesRel Lecture3zcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 5 Dr. K. MalikDocument2 pagesSPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 5 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 3 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 3 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 3 Dr. K. MalikDocument2 pagesSPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 3 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 2 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 2 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 4 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2016: Exercise Sheet 4 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 6 Dr. K. MalikDocument2 pagesSPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 6 Dr. K. Malikzcap excelNo ratings yet
- Exam 2012Document9 pagesExam 2012zcap excelNo ratings yet
- MT4 2016 Exam FinalDocument7 pagesMT4 2016 Exam Finalzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 4 Dr. K. MalikDocument2 pagesSPA6311 Physical Cosmology, Spring 2017: Exercise Sheet 4 Dr. K. Malikzcap excelNo ratings yet
- SPA6311 Physical Cosmology, Spring 2017: Coursework Sheet 1 Dr. K. MalikDocument1 pageSPA6311 Physical Cosmology, Spring 2017: Coursework Sheet 1 Dr. K. Malikzcap excelNo ratings yet
- Gal 2018 CourseNotes c1Document17 pagesGal 2018 CourseNotes c1zcap excelNo ratings yet
- MTH-6132 Syllabus 2018Document2 pagesMTH-6132 Syllabus 2018zcap excelNo ratings yet
- NeetDocument6 pagesNeetmanendra lakraNo ratings yet
- Measurement of Level by Air Purge Method: Instruction ManualDocument8 pagesMeasurement of Level by Air Purge Method: Instruction ManualrajeshNo ratings yet
- Department of Electrical Engineering Indian Institute of Technology, Roorkee Roorkee EEN-112: Electrical Science Tutorial Sheet - 05Document1 pageDepartment of Electrical Engineering Indian Institute of Technology, Roorkee Roorkee EEN-112: Electrical Science Tutorial Sheet - 05Kumar ShivamNo ratings yet
- Module 1Document18 pagesModule 1let's skip thisNo ratings yet
- Key Principles of Mat&Energy BalanceDocument6 pagesKey Principles of Mat&Energy BalanceandhucaosNo ratings yet
- Lecture 3 - Curves in Space and Their TangentDocument38 pagesLecture 3 - Curves in Space and Their TangentNURUL YAHSIFAH SYQELLA BINTI YAHYA BK21110100No ratings yet
- GessDocument7 pagesGessbertu2000No ratings yet
- Solar Refrigerator ThesisDocument8 pagesSolar Refrigerator Thesiscarmenmartinezmcallen100% (2)
- Bucholz RelayDocument4 pagesBucholz RelayMonish Nawal100% (1)
- Mba Wala DPPDocument11 pagesMba Wala DPPiamaamirkhan03No ratings yet
- Equations: Waves Revision SummaryDocument3 pagesEquations: Waves Revision SummaryD IeadsatanisNo ratings yet
- Instantaneous Center of Zero VelocityDocument15 pagesInstantaneous Center of Zero Velocitym_er100No ratings yet
- Af95b 30 11RT 70Document5 pagesAf95b 30 11RT 70AdelAlcebaiNo ratings yet
- Renewable Energy: Arihant Sonawat, Young-Seok Choi, Kyung Min Kim, Jin-Hyuk KimDocument17 pagesRenewable Energy: Arihant Sonawat, Young-Seok Choi, Kyung Min Kim, Jin-Hyuk KimAYDIN KOSENo ratings yet
- FSU Electronics PrelabDocument7 pagesFSU Electronics Prelabcamaguey5No ratings yet
- Brosur SikaDocument7 pagesBrosur SikachaerulNo ratings yet
- Chapter 2 - Part 3 - Electric Potential - PHYS 331Document45 pagesChapter 2 - Part 3 - Electric Potential - PHYS 331Taukeer KhanNo ratings yet
- Power Systems-III Ditital NotesDocument102 pagesPower Systems-III Ditital NotesSimranNo ratings yet
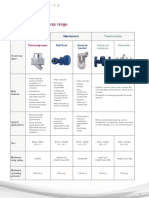
- Spirax Sarco's Steam Trap Range: ThermodynamicDocument1 pageSpirax Sarco's Steam Trap Range: ThermodynamicBinhvvNo ratings yet
- 18EES101J Basic Electrical Engineering EeeDocument122 pages18EES101J Basic Electrical Engineering EeeShaik RazaqNo ratings yet
- Buoyancy LabDocument3 pagesBuoyancy LabDomNo ratings yet
- Question Paper Delhi 2013 CBSE Class 12 PhysicsDocument7 pagesQuestion Paper Delhi 2013 CBSE Class 12 Physicsjashwanth kumar58No ratings yet
- Wind Plant Collector SystemDocument16 pagesWind Plant Collector SystemDaniel DelaFuenteNo ratings yet
- 3SU11000AB401FA0 Datasheet enDocument4 pages3SU11000AB401FA0 Datasheet enpatrykk11195No ratings yet
- Semiconductor PN Junction TheoryDocument29 pagesSemiconductor PN Junction TheoryAyenIrNo ratings yet
- Measurement TypedDocument7 pagesMeasurement TypedShashwat KhuranaNo ratings yet
- ONGC Electrical 2Document19 pagesONGC Electrical 2Shvm ThakurNo ratings yet