0% found this document useful (0 votes)
360 viewsLecture Notes Differential Equation - First Order ODE
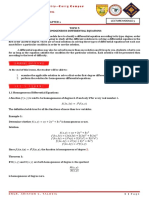
An exact differential equation is of the form:
M(x,y)dx + N(x,y)dy = 0
Where M and N are functions of both x and y.
Method of Solution:
1) Check if equation is exact or not by applying:
∂M ∂N
____ = _______
∂y ∂x
2) If exact, find the integrating factor μ(x,y).
3) Multiply both sides by μ and integrate.
4) Solve for C to get the general solution.
Example 1:
Check if the following differential equation is exact:
(x+y
Uploaded by
lureenCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
360 viewsLecture Notes Differential Equation - First Order ODE
An exact differential equation is of the form:
M(x,y)dx + N(x,y)dy = 0
Where M and N are functions of both x and y.
Method of Solution:
1) Check if equation is exact or not by applying:
∂M ∂N
____ = _______
∂y ∂x
2) If exact, find the integrating factor μ(x,y).
3) Multiply both sides by μ and integrate.
4) Solve for C to get the general solution.
Example 1:
Check if the following differential equation is exact:
(x+y
Uploaded by
lureenCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 49