Government Polytechnic Muzaffarpur: Name of The Lab: Control System
Government Polytechnic Muzaffarpur: Name of The Lab: Control System
Download as pdf or txt
You might also like
- (PDF Download) Fundamentals of Thermodynamics 10th Edition Claus Borgnakke Fulll ChapterDocument64 pages(PDF Download) Fundamentals of Thermodynamics 10th Edition Claus Borgnakke Fulll Chapterdjiniccolgan100% (4)
- En 13121 GRPDocument9 pagesEn 13121 GRPStephen100% (1)
- Mikkel Borch-Jacobsen - The Freudian Subject-Stanford University Press (1991) PDFDocument287 pagesMikkel Borch-Jacobsen - The Freudian Subject-Stanford University Press (1991) PDFFábio EstevesNo ratings yet
- SANS5863 - Compressive Strength of Hardened ConcreteDocument8 pagesSANS5863 - Compressive Strength of Hardened ConcreteBrendon GovaNo ratings yet
- Plot Characteristics of FETDocument4 pagesPlot Characteristics of FETTapobroto Chatterjee100% (3)
- Fals Borda and Rahman - 1991 - Action and Knowledge Breaking The Monopoly With PDocument97 pagesFals Borda and Rahman - 1991 - Action and Knowledge Breaking The Monopoly With Psebastianmunozt100% (1)
- Control Engineering I PDFDocument15 pagesControl Engineering I PDFkipkorir kemboiNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- Automatic Control System Section BDocument19 pagesAutomatic Control System Section Bssohel7575No ratings yet
- Time - Domain AnalysisDocument30 pagesTime - Domain Analysisabhishek topwalNo ratings yet
- Time Response AnalysisDocument37 pagesTime Response Analysis7014KANISHKA JAISWALNo ratings yet
- Instruction Manual: Test Signal GeneratorDocument7 pagesInstruction Manual: Test Signal GeneratornileshsawNo ratings yet
- Ec Formula Notes 11Document369 pagesEc Formula Notes 11Tharun kondaNo ratings yet
- Control System Viva QuestionDocument13 pagesControl System Viva QuestionMasudur RahmanNo ratings yet
- Linear Control System: Presented by Imran Basha SyedDocument35 pagesLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNo ratings yet
- Exp 1Document33 pagesExp 1k4nishkkNo ratings yet
- Performance Improvement For DC Buck Converter With Fuzzy ControllerDocument6 pagesPerformance Improvement For DC Buck Converter With Fuzzy ControllerRumana AliNo ratings yet
- Control System Lecture NotesDocument40 pagesControl System Lecture NotesAbcdNo ratings yet
- Week9 Model ConversionDocument24 pagesWeek9 Model ConversionAl AidenNo ratings yet
- Modules ICSDocument141 pagesModules ICShokohad413No ratings yet
- ELM 322, Control Systems Control Systems Spring 2015Document37 pagesELM 322, Control Systems Control Systems Spring 2015kaanNo ratings yet
- Control System Lab: Practical ManualDocument6 pagesControl System Lab: Practical ManualVats AlokNo ratings yet
- Control Systems Two Marks QuestionDocument41 pagesControl Systems Two Marks QuestionSk WajuddinNo ratings yet
- Transient and Steady State Response Analysis: Module - 3Document22 pagesTransient and Steady State Response Analysis: Module - 3Rajath UpadhyaNo ratings yet
- Control System Engineering 2 MarksDocument18 pagesControl System Engineering 2 MarksSeenu CnuNo ratings yet
- Act Solved May 2019Document27 pagesAct Solved May 2019Praveen KNo ratings yet
- Control Systems Ec 34Document36 pagesControl Systems Ec 34hellovhello76No ratings yet
- Control SystemDocument45 pagesControl SystempriscillaNo ratings yet
- Week 7A - Online Classes - S2020Document16 pagesWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument100 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu SinghNo ratings yet
- First Order SystemDocument21 pagesFirst Order SystemNiranjan BeheraNo ratings yet
- Unit 4Document41 pagesUnit 4ankita.malhotraNo ratings yet
- Control Systems Lab #3: Stability AnalysisDocument5 pagesControl Systems Lab #3: Stability Analysisahmed shahNo ratings yet
- CSE 2 MarksDocument5 pagesCSE 2 MarksdhanarajNo ratings yet
- Control Engineering: Closed-Loop Poles Are The Positions of The Poles (OrDocument9 pagesControl Engineering: Closed-Loop Poles Are The Positions of The Poles (OrWanambwa SilagiNo ratings yet
- DC Motor Position Control System - PremierDocument13 pagesDC Motor Position Control System - PremierAAYUSH KUMARNo ratings yet
- Mathematical Models of SystemsDocument16 pagesMathematical Models of SystemsmansoorNo ratings yet
- CTRL Sys Lab ManualDocument46 pagesCTRL Sys Lab Manualabixek100% (2)
- Reviewer ControlDocument10 pagesReviewer ControlDioyo, ArvieNo ratings yet
- Introduction To First Order SystemsDocument4 pagesIntroduction To First Order SystemsSyafiiqahNo ratings yet
- Unit II Block Diagram Representation Converted 1Document53 pagesUnit II Block Diagram Representation Converted 1pranjulmishra504No ratings yet
- Lecture 1 Control SystemsDocument18 pagesLecture 1 Control SystemsMohammed AshrafNo ratings yet
- Lab 3Document17 pagesLab 3hassan ullah khanNo ratings yet
- Feedbacksys 123Document16 pagesFeedbacksys 123Kimbeng FaithNo ratings yet
- Control Engineering: 2 Marks Questions & AnswersDocument16 pagesControl Engineering: 2 Marks Questions & AnswersLakshumaiah Majjari100% (1)
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- Control Assignment Rev 3Document23 pagesControl Assignment Rev 3Dean WoolleyNo ratings yet
- 3Document9 pages3Haider TawfeeqNo ratings yet
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocument34 pagesProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshNo ratings yet
- DSD Mod3@AzDOCUMENTS - inDocument34 pagesDSD Mod3@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- Chapter 2Document31 pagesChapter 2Endalk SimegnNo ratings yet
- Chapter 1 Introduction Control SysDocument52 pagesChapter 1 Introduction Control SysHaliza MatsaniNo ratings yet
- Me3791 Unit 2 NotesDocument62 pagesMe3791 Unit 2 NotesArjun ReddyNo ratings yet
- LCS 6th Lab ManualDocument18 pagesLCS 6th Lab Manualmuneebgoraya60No ratings yet
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkDocument25 pagesCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARNo ratings yet
- PID Controller - DC MotorDocument6 pagesPID Controller - DC MotorKrutika GiteNo ratings yet
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDocument27 pagesControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNo ratings yet
- On UNIT 1Document94 pagesOn UNIT 1Girish Shankar MishraNo ratings yet
- T 3Document16 pagesT 3Marwa MohamedNo ratings yet
- CSP5Document25 pagesCSP5burasuyash2803No ratings yet
- Mechatronics Bju Sir FullDocument116 pagesMechatronics Bju Sir Fullsaikrishnaps32No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Lojfdhnweiuhruiw3ghr 8732tyr76325trret3w7 8rdg237tgdijgqadfuyg Duytwv87rdtwq8udfw u8fd8uy8AZAA Lojfdhnweiuhruiw3ghr 8732tyr76325trret3w7 8rdg237tgdijgqadfuyg Duytwv87rdtwq8udfw u8fd8uy8AZAADocument10 pagesLojfdhnweiuhruiw3ghr 8732tyr76325trret3w7 8rdg237tgdijgqadfuyg Duytwv87rdtwq8udfw u8fd8uy8AZAA Lojfdhnweiuhruiw3ghr 8732tyr76325trret3w7 8rdg237tgdijgqadfuyg Duytwv87rdtwq8udfw u8fd8uy8AZAATapobroto ChatterjeeNo ratings yet
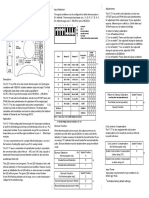
- A I M:-Appar Atus:-: S.N O. Meter Rang e Type Quantit yDocument4 pagesA I M:-Appar Atus:-: S.N O. Meter Rang e Type Quantit yTapobroto ChatterjeeNo ratings yet
- Power Electronics & Drives: Unit: 1 Power Semiconductor DevicesDocument24 pagesPower Electronics & Drives: Unit: 1 Power Semiconductor DevicesTapobroto ChatterjeeNo ratings yet
- Aim of Experiment: To Plot Forward & Reverse Biased Characteristics ofDocument4 pagesAim of Experiment: To Plot Forward & Reverse Biased Characteristics ofTapobroto ChatterjeeNo ratings yet
- Io Op Waveform of CE AmplifierDocument4 pagesIo Op Waveform of CE AmplifierTapobroto ChatterjeeNo ratings yet
- A I M:-Appar Atus:-: S.N O. Meter Rang e Type Quantit yDocument4 pagesA I M:-Appar Atus:-: S.N O. Meter Rang e Type Quantit yTapobroto ChatterjeeNo ratings yet
- Electrical Shop WorkbookDocument49 pagesElectrical Shop WorkbookTapobroto Chatterjee100% (1)
- Plot The Characteristics of UJTDocument4 pagesPlot The Characteristics of UJTTapobroto Chatterjee100% (1)
- Government Polytechnic, Muzaffarpur: Name of The Lab: Electrical Workshop LabDocument15 pagesGovernment Polytechnic, Muzaffarpur: Name of The Lab: Electrical Workshop LabTapobroto Chatterjee100% (1)
- Gain Vs Frequency Characteristics of CE AmplifierDocument4 pagesGain Vs Frequency Characteristics of CE AmplifierTapobroto ChatterjeeNo ratings yet
- Ex - No.3 (A) Open Circuit Characteristics of DC Shunt GeneratorDocument3 pagesEx - No.3 (A) Open Circuit Characteristics of DC Shunt GeneratorTapobroto ChatterjeeNo ratings yet
- Measuring Low Rersistance by Kelvin Double BridgeDocument2 pagesMeasuring Low Rersistance by Kelvin Double BridgeTapobroto ChatterjeeNo ratings yet
- Bee IiiDocument68 pagesBee IiiTapobroto ChatterjeeNo ratings yet
- To Obtain The Performance of DC Series Motor by Load TestDocument4 pagesTo Obtain The Performance of DC Series Motor by Load TestTapobroto ChatterjeeNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Electric Traction-IIDocument9 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Electric Traction-IITapobroto ChatterjeeNo ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: DCDocument19 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: DCTapobroto ChatterjeeNo ratings yet
- Superposition Theorem Lab ManualDocument3 pagesSuperposition Theorem Lab ManualTapobroto ChatterjeeNo ratings yet
- Forward and Reverse Bias of Diode PDFDocument5 pagesForward and Reverse Bias of Diode PDFTapobroto Chatterjee100% (1)
- Ex - No.3 (A) Open Circuit Characteristics of DC Shunt GeneratorDocument3 pagesEx - No.3 (A) Open Circuit Characteristics of DC Shunt GeneratorTapobroto ChatterjeeNo ratings yet
- Chap 3 FinalDocument10 pagesChap 3 FinalCarla LedinioNo ratings yet
- I1912 Ai Opr MST 0070 00 Cms For Pelmet WorkDocument13 pagesI1912 Ai Opr MST 0070 00 Cms For Pelmet WorkAiplshubh ChavanNo ratings yet
- Stiffness Report GRP PIPEDocument19 pagesStiffness Report GRP PIPEanishdev6No ratings yet
- Chapter 7 Qualtiy ControlDocument83 pagesChapter 7 Qualtiy ControlEngineerMqNo ratings yet
- Royal Holloway Thesis SubmissionDocument5 pagesRoyal Holloway Thesis Submissionppxohvhkd100% (2)
- A Study On Fire Resistance of ConcreteDocument30 pagesA Study On Fire Resistance of Concretesanthu256No ratings yet
- Task Cards Emotions Card Game KDocument18 pagesTask Cards Emotions Card Game KaandersNo ratings yet
- Potential Sources of Contamination To Weak Lensing Measurements: Constraints From N-Body SimulationsDocument12 pagesPotential Sources of Contamination To Weak Lensing Measurements: Constraints From N-Body SimulationsRazvan PistoleaNo ratings yet
- Quadratic Functions. Non-Linear Demand and Supply FunctionsDocument24 pagesQuadratic Functions. Non-Linear Demand and Supply FunctionsElvira Hernandez BenitoNo ratings yet
- Brosur Luminos Agile MaxDocument8 pagesBrosur Luminos Agile MaxFadhil ZufarNo ratings yet
- Leica TCS SP8 SVI Huygens-Flyer - ENDocument4 pagesLeica TCS SP8 SVI Huygens-Flyer - ENhisto.haritNo ratings yet
- LowRes InnerCircle ToneOfVoiceGuidelines 202005Document34 pagesLowRes InnerCircle ToneOfVoiceGuidelines 202005Ola ListunovaNo ratings yet
- T M 1642412047 Measuring Length Year 3 Differentiated Maths Activity Sheets - Ver - 1Document6 pagesT M 1642412047 Measuring Length Year 3 Differentiated Maths Activity Sheets - Ver - 1icygirl11No ratings yet
- Bvaap 20 (2) 171-176Document6 pagesBvaap 20 (2) 171-176nikhilsachanNo ratings yet
- Second Term Second Ca TestDocument17 pagesSecond Term Second Ca TestwuhemosesNo ratings yet
- Isi CmiDocument6 pagesIsi Cmiparagparab5No ratings yet
- Reading Passage 2Document4 pagesReading Passage 2Nguyen Hoang AnhNo ratings yet
- Computer FundamentalsDocument4 pagesComputer FundamentalsDia Necson Nicole SapongNo ratings yet
- Formation of The Universe Student SheetDocument2 pagesFormation of The Universe Student SheetDubu Dubu DahyunieeNo ratings yet
- Manuel S. Enverga University Foundation Candelaria, Inc. Quezon, PhilippinesDocument33 pagesManuel S. Enverga University Foundation Candelaria, Inc. Quezon, PhilippinesFrancine Nicole MarquezNo ratings yet
- Company ProfileDocument9 pagesCompany ProfilefahadNo ratings yet
- FC - t1 TC Signal ConditionerDocument2 pagesFC - t1 TC Signal ConditionerkicsnerNo ratings yet
- 19MTE Summer Semester Time TableDocument1 page19MTE Summer Semester Time Tablepraim chandNo ratings yet
- Result 7th Sem 2015 - 19Document44 pagesResult 7th Sem 2015 - 19binodNo ratings yet
- Reading Comprehension Passage A (Knee) : C. Physical FitnessDocument11 pagesReading Comprehension Passage A (Knee) : C. Physical FitnessDazzelle BasarteNo ratings yet