Chapter 1 (Kirk)
Chapter 1 (Kirk)
Download as pdf or txt
You might also like
- SAP Plant MaintenanceDocument26 pagesSAP Plant Maintenancesalemg82100% (1)
- DC SystemDocument230 pagesDC Systemsalemg82100% (1)
- Ee580 Notes PDFDocument119 pagesEe580 Notes PDFnageshNo ratings yet
- Reliability of Electric Generation With Transmission ConstraintsDocument215 pagesReliability of Electric Generation With Transmission ConstraintsUlilNo ratings yet
- JNTUK R10 CSE 4-1 SyllabusDocument30 pagesJNTUK R10 CSE 4-1 SyllabusTSRKNo ratings yet
- Palumbo HomingDocument18 pagesPalumbo Homingraa2010No ratings yet
- Unit-5 (Part-1)Document12 pagesUnit-5 (Part-1)Yash KanojiaNo ratings yet
- Advanced Control SystemsDocument81 pagesAdvanced Control Systemsanoop sathyanNo ratings yet
- Chapter 1 - IntroductionDocument47 pagesChapter 1 - IntroductionaaaaaaaaaaaaaaaaaaaaaaaaaNo ratings yet
- State Space RepresentationDocument38 pagesState Space RepresentationdannyabevoyagerNo ratings yet
- Stabilization of A 3D Bipedal Locomotion Under A Unilateral ConstraintDocument24 pagesStabilization of A 3D Bipedal Locomotion Under A Unilateral ConstraintSergey González-MejíaNo ratings yet
- chapter 2 mathematical modeling of control systemDocument47 pageschapter 2 mathematical modeling of control systemBewnet GetachewNo ratings yet
- Discrete Event Systems: Lecture Notes ofDocument25 pagesDiscrete Event Systems: Lecture Notes ofshah4190No ratings yet
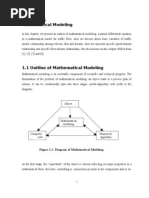
- Figure 1.1: Diagram of Mathematical ModelingDocument27 pagesFigure 1.1: Diagram of Mathematical ModelingAhsan Ali ShaikatNo ratings yet
- Optimal Control PDFDocument123 pagesOptimal Control PDFHelbert Agluba PaatNo ratings yet
- The Linear Quadratic Regular Algorithm-Based Control System of The Direct Current MotorDocument8 pagesThe Linear Quadratic Regular Algorithm-Based Control System of The Direct Current MotorVượng Nguyễn VănNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- Woolseylecture 1Document4 pagesWoolseylecture 1Qing LiNo ratings yet
- Flatness and Motion Planning: The Car With: N TrailersDocument6 pagesFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousNo ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- Unit 2 Control SystemDocument75 pagesUnit 2 Control SystemGirish Shankar MishraNo ratings yet
- Cede Diez OchoDocument2 pagesCede Diez Ochospawn1984No ratings yet
- Transfer Function: FOR Discrete Lti SystemDocument38 pagesTransfer Function: FOR Discrete Lti SystemKrishn LimbachiyaNo ratings yet
- CSE CDT28 Summary 6EEE1 BJK 2022-23UNIT-IVDocument3 pagesCSE CDT28 Summary 6EEE1 BJK 2022-23UNIT-IVNadeem KhanNo ratings yet
- Active Interaction Control of Civil Structures. Part 1: SDOF SystemsDocument18 pagesActive Interaction Control of Civil Structures. Part 1: SDOF Systemsthang272No ratings yet
- Optimal Control ApparentlyDocument32 pagesOptimal Control ApparentlySisa JoboNo ratings yet
- Delay-Dependent Robust H Control of Time-Delay Systems: M. Sun Y. JiaDocument9 pagesDelay-Dependent Robust H Control of Time-Delay Systems: M. Sun Y. JiainfodotzNo ratings yet
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDocument120 pagesProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNo ratings yet
- Linear Systems With State and Control Constraints: The Theory and Application of Maximal Output Admissible SetsDocument13 pagesLinear Systems With State and Control Constraints: The Theory and Application of Maximal Output Admissible SetsJichengChenNo ratings yet
- SME1306Document137 pagesSME13062041 SANTHAKUMAR PNo ratings yet
- Optimal and Robust ControlDocument216 pagesOptimal and Robust ControlCh BarriosNo ratings yet
- Chapter 1Document8 pagesChapter 1hitesh89No ratings yet
- Over 1Document3 pagesOver 1aldasdawNo ratings yet
- 1993 - Calculation of the state transition matrix for linear time varying systemsDocument10 pages1993 - Calculation of the state transition matrix for linear time varying systemsFederico ThomasNo ratings yet
- ExercisesDocument136 pagesExercisesPablo TaboadaNo ratings yet
- 1-01-c Transfer Function and System Block DiagramDocument14 pages1-01-c Transfer Function and System Block DiagramAlan LeungNo ratings yet
- Control Systems Students PDFDocument23 pagesControl Systems Students PDFRocker byNo ratings yet
- Control Systems Students PDFDocument23 pagesControl Systems Students PDFRocker byNo ratings yet
- Optimal Control Problem. An Optimal Control (OC) Problem Is A Mathematical ProDocument2 pagesOptimal Control Problem. An Optimal Control (OC) Problem Is A Mathematical ProdasaikatNo ratings yet
- EE580 Final Exam 2 PDFDocument2 pagesEE580 Final Exam 2 PDFMd Nur-A-Adam DonyNo ratings yet
- cs2 PDFDocument84 pagescs2 PDFAjayNo ratings yet
- Lecture 2 and 3Document13 pagesLecture 2 and 3Abel OmweriNo ratings yet
- Chapter 1 IntroductionDocument32 pagesChapter 1 IntroductionYucheng XiangNo ratings yet
- Minimum Time ControlDocument6 pagesMinimum Time ControlLi NguyenNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- MODULE 3 FeedbackDocument20 pagesMODULE 3 FeedbackJames CerbitoNo ratings yet
- Optimal and Robust ControlDocument233 pagesOptimal and Robust Controlيزن ابراهيم يعقوب دباس يزن ابراهيم يعقوب دباسNo ratings yet
- Examples and Modeling of Switched and Impulsive SystemsDocument19 pagesExamples and Modeling of Switched and Impulsive SystemsmorometedNo ratings yet
- A Tutorial On Preview Control SystemsDocument6 pagesA Tutorial On Preview Control SystemsjaquetonaNo ratings yet
- Chapter 03Document89 pagesChapter 03Şirin AdaNo ratings yet
- Ege416 ProjectDocument6 pagesEge416 ProjectAddisu TsehayNo ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Local Stabilization of Linear Systems Under Amplitude and Rate Saturating ActuatorsDocument6 pagesLocal Stabilization of Linear Systems Under Amplitude and Rate Saturating ActuatorshighwattNo ratings yet
- Automatic Control ExerciseDocument140 pagesAutomatic Control Exercisetaile1995No ratings yet
- Output Feedback Controllers For Systems With Structured UncertaintyDocument5 pagesOutput Feedback Controllers For Systems With Structured UncertaintyBikshan GhoshNo ratings yet
- On The Optimal Angular Velocity Control of Asymmetrical Space VehiclesDocument4 pagesOn The Optimal Angular Velocity Control of Asymmetrical Space VehiclesJoseana PossidonioNo ratings yet
- A Direct Algorithm For Pole Placement by StatederivativeDocument9 pagesA Direct Algorithm For Pole Placement by StatederivativeMedo AnaNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- Renard Series and Preferred Electrical RatingsDocument2 pagesRenard Series and Preferred Electrical Ratingssalemg82No ratings yet
- 7075 AutotransformerProtection RA 20230912 WebDocument21 pages7075 AutotransformerProtection RA 20230912 Websalemg82No ratings yet
- Conceptual Clarifications in Electrical Power Engineering-BasicsDocument29 pagesConceptual Clarifications in Electrical Power Engineering-Basicssalemg820% (1)
- Transformer Neutral GroundingDocument5 pagesTransformer Neutral Groundingsalemg82No ratings yet
- Books On High Voltage Engineering and DielectricsDocument4 pagesBooks On High Voltage Engineering and Dielectricssalemg82No ratings yet
- Misconceptions About TransformersDocument21 pagesMisconceptions About Transformerssalemg82No ratings yet
- LearningDocument2 pagesLearningsalemg82No ratings yet
- Transformer Oil in Service - Case HistoriesDocument22 pagesTransformer Oil in Service - Case Historiessalemg82No ratings yet
- How To Prevent Power Transformer AccidentsDocument5 pagesHow To Prevent Power Transformer Accidentssalemg82No ratings yet
- Maximum Permissible Flux Density in Transformers at Rated Voltage and FrequencyDocument7 pagesMaximum Permissible Flux Density in Transformers at Rated Voltage and Frequencysalemg82100% (1)
- Detailed SolutionsDocument1 pageDetailed Solutionssalemg82No ratings yet
- QuizDocument6 pagesQuizsalemg82No ratings yet
- Detailed SolutionsDocument2 pagesDetailed Solutionssalemg82No ratings yet
- Training On Iso 17011Document93 pagesTraining On Iso 17011salemg82No ratings yet
- Ala MardawiDocument171 pagesAla Mardawisalemg82No ratings yet
- QuizDocument13 pagesQuizsalemg82No ratings yet
- Qaid 2021 IOP Conf. Ser. Mater. Sci. Eng. 1127 012034Document9 pagesQaid 2021 IOP Conf. Ser. Mater. Sci. Eng. 1127 012034salemg82No ratings yet
- Introduction To Harmonic Analysis Basics - R2Document46 pagesIntroduction To Harmonic Analysis Basics - R2salemg82100% (2)
- RHC Protection - TCSDocument29 pagesRHC Protection - TCSsalemg82No ratings yet
- Motor PDFDocument6 pagesMotor PDFsalemg82No ratings yet
- IEC602551 XX ProtectionrelayfunctionalstandardsforallDocument8 pagesIEC602551 XX Protectionrelayfunctionalstandardsforallsalemg82No ratings yet
- Mastery LevelDocument2 pagesMastery Levelsalemg82No ratings yet
- Breaker Failure Protection Applications of Modern Numerical Distance RelaysDocument15 pagesBreaker Failure Protection Applications of Modern Numerical Distance Relayssalemg82No ratings yet
- SEL411L Line Protection Relay Summary - RepairedDocument28 pagesSEL411L Line Protection Relay Summary - Repairedsalemg82No ratings yet
- Cables & Power Network CalculationsDocument65 pagesCables & Power Network Calculationssalemg82No ratings yet
- How To Make Calculation For A Distribution Substation 1004 KV 21600 kVADocument14 pagesHow To Make Calculation For A Distribution Substation 1004 KV 21600 kVAsalemg82No ratings yet
- Design Knowhow Low Voltage Substation Layouts Earthing Fire Protection and Tests PDFDocument24 pagesDesign Knowhow Low Voltage Substation Layouts Earthing Fire Protection and Tests PDFsalemg8250% (2)
- BR 821-044 Product-Brochure Cable-Fault-Location EN PDFDocument15 pagesBR 821-044 Product-Brochure Cable-Fault-Location EN PDFsalemg82No ratings yet
- 1 C531 D 01Document88 pages1 C531 D 01Manigandan SekarNo ratings yet
- 007 - Mathematical Programming and Game Theory S K Neogy, Ravindra B BapatDocument234 pages007 - Mathematical Programming and Game Theory S K Neogy, Ravindra B BapatridwangsnNo ratings yet
- Robot Control Part 1: Forward Transformation Matrices: Learning The Inverse Kinematic TransformationDocument8 pagesRobot Control Part 1: Forward Transformation Matrices: Learning The Inverse Kinematic TransformationRuben RaygosaNo ratings yet
- M16 Tier1Document184 pagesM16 Tier1ShahrizatSmailKassimNo ratings yet
- Numerical Methods - IterationDocument12 pagesNumerical Methods - Iterationpeter-albert.danielNo ratings yet
- Matrices MAT1120Document8 pagesMatrices MAT1120JOHN MVULA IINo ratings yet
- Scilab Book AkhileshDocument96 pagesScilab Book AkhileshRobin MukherjeeNo ratings yet
- B B M-New-syllabus PDFDocument89 pagesB B M-New-syllabus PDFRajiv MohanNo ratings yet
- NA Tutorial Booklet PDFDocument51 pagesNA Tutorial Booklet PDFHaneesha MuddasaniNo ratings yet
- Free Probability Theory PDFDocument2 pagesFree Probability Theory PDFJulioNo ratings yet
- C ++Document187 pagesC ++Mahad Aamir SamatarNo ratings yet
- Merge PDF Files - 24102024 - 083124Document177 pagesMerge PDF Files - 24102024 - 083124jnv.kapasariaNo ratings yet
- PRM Handbook Introduction and ContentsDocument23 pagesPRM Handbook Introduction and ContentsMike Wong0% (2)
- Combined Least SquaresDocument21 pagesCombined Least Squaressowmiyanarayanan_k_j88No ratings yet
- The Double Well Potential in Quantum Mechanics: A Simple, Numerically Exact FormulationDocument10 pagesThe Double Well Potential in Quantum Mechanics: A Simple, Numerically Exact FormulationcepericNo ratings yet
- Recommender Systems-Unit IDocument12 pagesRecommender Systems-Unit IpadmapriyaNo ratings yet
- Cinco Ley - PVP - YNF PDFDocument4 pagesCinco Ley - PVP - YNF PDFMiguel Angel Vidal ArangoNo ratings yet
- All About NDA Written Exam and Pattern 2018: Code Subject Time Max MarksDocument6 pagesAll About NDA Written Exam and Pattern 2018: Code Subject Time Max MarksAmit SutarNo ratings yet
- Class-12 Matrix WorksheetDocument3 pagesClass-12 Matrix WorksheetHemant Chaudhary100% (1)
- 2-Level Logic ( 0', 1') .: Introduction To ASIC DesignDocument8 pages2-Level Logic ( 0', 1') .: Introduction To ASIC DesignAli AhmadNo ratings yet
- Mukono Mock Examination Mathematics Uce Paper 1Document5 pagesMukono Mock Examination Mathematics Uce Paper 1andreeNo ratings yet
- Version publiée-JSTAT - 064P - 0516Document51 pagesVersion publiée-JSTAT - 064P - 0516martine.le-berreNo ratings yet
- Class Xii Mathematics Mid Term 22-23 (120 Copies)Document6 pagesClass Xii Mathematics Mid Term 22-23 (120 Copies)Ahana Singh XI S5No ratings yet
- Plant Disease Detector: Pune Institute of Computer Technology (PICT)Document5 pagesPlant Disease Detector: Pune Institute of Computer Technology (PICT)Drawing n RockingNo ratings yet
- Manual GiDDocument224 pagesManual GiDVictor SosaNo ratings yet
- Horn Lecture 1Document11 pagesHorn Lecture 1utech.ujuziNo ratings yet
- IRS III Year UNIT-3 Part 1Document18 pagesIRS III Year UNIT-3 Part 1Banala ramyasree50% (2)
- Syllabus BCA Sem 1 Basics of MathematicsDocument2 pagesSyllabus BCA Sem 1 Basics of Mathematicsjoshi_sejal274255100% (3)