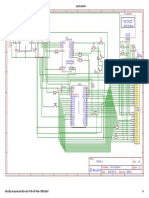
Arduino Gps Project1 PDF
Arduino Gps Project1 PDF
Download as docx, pdf, or txt
You might also like
- HP Color Laserjet Enterprise m553 Repair ManualDocument3,204 pagesHP Color Laserjet Enterprise m553 Repair Manualalvaroandre67% (6)
- 07-Raspberry Pi I2CDocument7 pages07-Raspberry Pi I2CArslan CoskunNo ratings yet
- Experiment # 4: ESP32 ADC - Read Analog Values With Arduino IDEDocument6 pagesExperiment # 4: ESP32 ADC - Read Analog Values With Arduino IDEWasiq BhattiNo ratings yet
- M 12Document2 pagesM 12sirius_82No ratings yet
- Smart Dust Bin Using Ultrasonic SensorDocument32 pagesSmart Dust Bin Using Ultrasonic SensorPraveen KodgirwarNo ratings yet
- arduinoDocument14 pagesarduinomahmoudelsheikh188No ratings yet
- Alan v. Oppenheim, Ronald W. Schafer - Digital Signal Processing (1975, Prentice-Hall) - Libgen - LiDocument600 pagesAlan v. Oppenheim, Ronald W. Schafer - Digital Signal Processing (1975, Prentice-Hall) - Libgen - LianupamfamNo ratings yet
- Multirate Signal ProcessingDocument25 pagesMultirate Signal ProcessingHarishNo ratings yet
- Arm 7 Based Theft Control, Accident Detection & Vehicle Positioning SystemDocument3 pagesArm 7 Based Theft Control, Accident Detection & Vehicle Positioning Systemrajabala93No ratings yet
- Adafruit Ultimate Gps PDFDocument52 pagesAdafruit Ultimate Gps PDFhdrthNo ratings yet
- ESP32 Based Webserver For Text To Speech (TTS) ConversionDocument10 pagesESP32 Based Webserver For Text To Speech (TTS) ConversionCahyaDsnNo ratings yet
- Arduino UNO - Lab Manual-5-33Document29 pagesArduino UNO - Lab Manual-5-33ECE N.V.Satyanarayana MurthyNo ratings yet
- UNIT 3 - Introduction To Arduino ProgrammingDocument27 pagesUNIT 3 - Introduction To Arduino Programmingrohitchoudhary2575No ratings yet
- Arduino CCDocument14 pagesArduino CCRachana SrinivasNo ratings yet
- Embedded Systems Unit 1 and 2 NotesDocument51 pagesEmbedded Systems Unit 1 and 2 NoteskarnamittapalliNo ratings yet
- WorskShop Lab 5Document22 pagesWorskShop Lab 5manavlund5No ratings yet
- Control Stepper Motor With A4988 Driver ModuleDocument14 pagesControl Stepper Motor With A4988 Driver ModulemariosagajNo ratings yet
- Project ReportDocument14 pagesProject ReportMark AggreyNo ratings yet
- The Arduino PlatformDocument33 pagesThe Arduino PlatformElijah MathewNo ratings yet
- Final IOT Labmaual SMP-DTEDocument45 pagesFinal IOT Labmaual SMP-DTEName NameNo ratings yet
- Anwitha ReportDocument50 pagesAnwitha Reportpravallika chejerlaNo ratings yet
- Booting Raspbian OS From The USB DiskDocument3 pagesBooting Raspbian OS From The USB DiskPraveen Kumar R100% (2)
- All ARM ProgrammesDocument14 pagesAll ARM ProgrammesManu PrakashNo ratings yet
- LaunchPad Ecosystem Selection Guide Slat152bDocument17 pagesLaunchPad Ecosystem Selection Guide Slat152bventsym100% (1)
- MicroPIC18F Lite User ManualDocument19 pagesMicroPIC18F Lite User ManualElena Gilbert100% (1)
- IotDocument5 pagesIotAyush MittalNo ratings yet
- MicrocontrollerDocument51 pagesMicrocontrollerArief Iskandar100% (1)
- Lecture Notes 1Document59 pagesLecture Notes 1Prabal RawatNo ratings yet
- LAB 3 - Arduino As Microcontroller: LED Bar GraphDocument4 pagesLAB 3 - Arduino As Microcontroller: LED Bar Graphkyo_kusanagi_jb100% (1)
- PIC16F877 Timer Modules Tutorials - PIC Timer0 Tutorial PDFDocument3 pagesPIC16F877 Timer Modules Tutorials - PIC Timer0 Tutorial PDFvka_prince100% (2)
- mcb1700 LAB - Intro - ARM Cortex m3Document22 pagesmcb1700 LAB - Intro - ARM Cortex m3RagulANNo ratings yet
- Introduction To The ArduinoDocument43 pagesIntroduction To The ArduinoAbdulkerim100% (1)
- Arduino Pulse Width Modulation (PWM)Document12 pagesArduino Pulse Width Modulation (PWM)Mihai BogdanNo ratings yet
- What Is ESP32 SIM800L BoardDocument14 pagesWhat Is ESP32 SIM800L BoardjackNo ratings yet
- Armsravan 140618054148 Phpapp01Document132 pagesArmsravan 140618054148 Phpapp01smganorkarNo ratings yet
- ARDUINODocument13 pagesARDUINOGagleen RissamNo ratings yet
- CHP 5 Pic Micro Controller Instruction SetDocument75 pagesCHP 5 Pic Micro Controller Instruction Setsetup.143No ratings yet
- Lecture 5 Communicating With Peripherals 2021Document44 pagesLecture 5 Communicating With Peripherals 2021Pavan DhakeNo ratings yet
- Mentor PADS VX2.3 Student ManualDocument45 pagesMentor PADS VX2.3 Student ManualferasNo ratings yet
- MCBSTM32C Lab PDFDocument30 pagesMCBSTM32C Lab PDFguezaki6636No ratings yet
- Modified LDICA Lab R20 Ready To PrintDocument115 pagesModified LDICA Lab R20 Ready To PrintkottepoornachandrareddyNo ratings yet
- STM32F4-Discovery Keil TrainingDocument32 pagesSTM32F4-Discovery Keil TrainingDefne AktemizNo ratings yet
- Esp32 Devkit v1Document1 pageEsp32 Devkit v1Professor RASIA100% (1)
- Iot MajrrDocument25 pagesIot MajrrSrinivas ReddyNo ratings yet
- LCD 16X2 para PicsDocument21 pagesLCD 16X2 para Picsjuarez100% (1)
- Temperature Monitoring by Microcontroller Using ArduinoDocument44 pagesTemperature Monitoring by Microcontroller Using Arduinojp2udhayaNo ratings yet
- Ch01 Microcontroller History and FeaturesDocument20 pagesCh01 Microcontroller History and Featuresmaissy dellaNo ratings yet
- LPC11U6XDocument97 pagesLPC11U6XDenes MarschalkoNo ratings yet
- Introduction Arduino (A Demonstration Video)Document54 pagesIntroduction Arduino (A Demonstration Video)Nashucha MNo ratings yet
- Real Time ECG On Internet Using Raspberry PiDocument4 pagesReal Time ECG On Internet Using Raspberry PiVardhan ShahNo ratings yet
- Is-FullVersion Kit For Arduino MEGA 2560-1Document132 pagesIs-FullVersion Kit For Arduino MEGA 2560-1PolizeroNo ratings yet
- Ladder Logic For PIC and AVRDocument6 pagesLadder Logic For PIC and AVRTomás Totaro100% (1)
- Dspic DevDocument9 pagesDspic Devlibrian_30005821No ratings yet
- Arduino PPT AkhilDocument15 pagesArduino PPT Akhilakhil gharuNo ratings yet
- Arduino BreadBoard Advance Kit User Guide v2.1Document23 pagesArduino BreadBoard Advance Kit User Guide v2.1ic3_2kNo ratings yet
- Water Level Indicator Mini Project ReportDocument22 pagesWater Level Indicator Mini Project Reportabhay yadavNo ratings yet
- What Is I2C?: To Know The I2C in Detail See This ArticleDocument6 pagesWhat Is I2C?: To Know The I2C in Detail See This ArticleRauf LalaNo ratings yet
- For Program: VDD Ice - Dat Ice - CLK Reset GNDDocument1 pageFor Program: VDD Ice - Dat Ice - CLK Reset GNDBu As100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument27 pagesAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- IoT-Lab-Manual BTCS9201Document47 pagesIoT-Lab-Manual BTCS9201Ziyaul AijazNo ratings yet
- 37 in 1 Box Sensor Kit Fuer Arduino PDFDocument100 pages37 in 1 Box Sensor Kit Fuer Arduino PDFHeriton RochaNo ratings yet
- Iot Power Measurement Module: Presented byDocument18 pagesIot Power Measurement Module: Presented byAws FaeqNo ratings yet
- Automatic Water MotorDocument17 pagesAutomatic Water MotorAws FaeqNo ratings yet
- House'S Monitoring ConsumptionDocument19 pagesHouse'S Monitoring ConsumptionAws FaeqNo ratings yet
- Smart CityDocument18 pagesSmart CityAws FaeqNo ratings yet
- Vitals Monitor: Presented By: Mustafa Zia Haider Badr Abdul Latif Hisham 2Nd Stage (Evening Study) Dr. Omar YoussefDocument19 pagesVitals Monitor: Presented By: Mustafa Zia Haider Badr Abdul Latif Hisham 2Nd Stage (Evening Study) Dr. Omar YoussefAws FaeqNo ratings yet
- Infrared Thermal Imaging CameraDocument19 pagesInfrared Thermal Imaging CameraAws FaeqNo ratings yet
- Fire Fighting Robot: Presented byDocument19 pagesFire Fighting Robot: Presented byAws Faeq100% (1)
- Ir Thermometer: Presented By: Mustafa Ali Yassin Mohamed Fadel Alaa Khalil 2Nd Stage (Evening Study) Dr. Omar YoussefDocument17 pagesIr Thermometer: Presented By: Mustafa Ali Yassin Mohamed Fadel Alaa Khalil 2Nd Stage (Evening Study) Dr. Omar YoussefAws FaeqNo ratings yet
- Vehicle Tracking SystemDocument30 pagesVehicle Tracking SystemAws FaeqNo ratings yet
- Blind Band: Presented byDocument19 pagesBlind Band: Presented byAws FaeqNo ratings yet
- Smart Iot GardenDocument20 pagesSmart Iot GardenAws FaeqNo ratings yet
- Travelig Agengy: Presented By: Bashar Ali, Aws Ismail, & Kamal Saleh 2Nd Stage (Evening Study) Dr. Omar YoussefDocument19 pagesTravelig Agengy: Presented By: Bashar Ali, Aws Ismail, & Kamal Saleh 2Nd Stage (Evening Study) Dr. Omar YoussefAws FaeqNo ratings yet
- Motion and GestureDocument19 pagesMotion and GestureAws FaeqNo ratings yet
- HOM E Secu Rity AND Safe TY Syst EMDocument18 pagesHOM E Secu Rity AND Safe TY Syst EMAws FaeqNo ratings yet
- Travelig Agengy: Presented By: Bashar Ali, Aws Ismail, & Kamal Saleh 2Nd Stage (Evening Study) Dr. Omar YoussefDocument19 pagesTravelig Agengy: Presented By: Bashar Ali, Aws Ismail, & Kamal Saleh 2Nd Stage (Evening Study) Dr. Omar YoussefAws FaeqNo ratings yet
- Vitals Monitor: Presented By: Mustafa Zia Haider Badr Abdul Latif Hisham 2Nd Stage (Evening Study) Dr. Omar YoussefDocument20 pagesVitals Monitor: Presented By: Mustafa Zia Haider Badr Abdul Latif Hisham 2Nd Stage (Evening Study) Dr. Omar YoussefAws FaeqNo ratings yet
- Ite403 - Information Security - Chapter 4 Review: Study Guide QuestionsDocument7 pagesIte403 - Information Security - Chapter 4 Review: Study Guide QuestionsAws FaeqNo ratings yet
- Arduino-Based System For Soil Moisture MeasurementDocument17 pagesArduino-Based System For Soil Moisture MeasurementAws FaeqNo ratings yet
- Ite 407 - Advanced Databases - Worksheet T-1 - Triggers: Trigger As SELECT StatementsDocument1 pageIte 407 - Advanced Databases - Worksheet T-1 - Triggers: Trigger As SELECT StatementsAws FaeqNo ratings yet
- ITE403 Lab T-1 - Ciphers - SPRING2020PDocument2 pagesITE403 Lab T-1 - Ciphers - SPRING2020PAws FaeqNo ratings yet
- ITE403 Information Security Worksheet T-2 PUBLIC KEY ENCRYPTION With RSA SPRING2020Document5 pagesITE403 Information Security Worksheet T-2 PUBLIC KEY ENCRYPTION With RSA SPRING2020Aws FaeqNo ratings yet
- Design and Implementation of A Laundry ManagementDocument9 pagesDesign and Implementation of A Laundry ManagementAws FaeqNo ratings yet
- Robotic Arm: Presented By: Bashar Ali Awas Ismail Kamal Saleh 2nd Stage (Evening Study) Dr. Omar YoussefDocument17 pagesRobotic Arm: Presented By: Bashar Ali Awas Ismail Kamal Saleh 2nd Stage (Evening Study) Dr. Omar YoussefAws FaeqNo ratings yet
- Owners Manual: Atm Compact Class A/B AmplifierDocument24 pagesOwners Manual: Atm Compact Class A/B AmplifierOmar AldanaNo ratings yet
- Catalogue 170M1373Document1 pageCatalogue 170M1373Huỳnh Trung ChinhNo ratings yet
- PNOZ m1p Operating Manual 20878-En-13Document41 pagesPNOZ m1p Operating Manual 20878-En-13Peter Termaten100% (1)
- Description: (Optional) (Optional) (Optional) (Optional) (Optional) (Optional) (Optional)Document2 pagesDescription: (Optional) (Optional) (Optional) (Optional) (Optional) (Optional) (Optional)Arseni KarminskyNo ratings yet
- Satellite Link Design: A Tutorial: Aderemi A. Atayero, Matthew K. Luka and Adeyemi A. AlatisheDocument6 pagesSatellite Link Design: A Tutorial: Aderemi A. Atayero, Matthew K. Luka and Adeyemi A. AlatishecloudtelNo ratings yet
- List of 7400 Series Integrated Circuits PDFDocument22 pagesList of 7400 Series Integrated Circuits PDFduriiNo ratings yet
- Growling EagleDocument7 pagesGrowling Eaglerobbykurniawan452No ratings yet
- Low Drop Voltage Tracker TLE 4251: FeaturesDocument13 pagesLow Drop Voltage Tracker TLE 4251: FeaturesAGDO SERVICENo ratings yet
- Surface Pro 4: Top Features and BenefitsDocument4 pagesSurface Pro 4: Top Features and BenefitsLemuel BlayaNo ratings yet
- HBS730 ManualDocument19 pagesHBS730 ManualSofyan AriefNo ratings yet
- Henry's Bench: Keyes Ky-040 Arduino Rotary Encoder User ManualDocument4 pagesHenry's Bench: Keyes Ky-040 Arduino Rotary Encoder User ManualIsrael ZavalaNo ratings yet
- WCDMA Synchronization SimplifiedDocument18 pagesWCDMA Synchronization Simplifiedmola argawNo ratings yet
- Underwater Wireless Optical Communication System Using Blue LedsDocument6 pagesUnderwater Wireless Optical Communication System Using Blue LedsAnant SinhaNo ratings yet
- Zenitel - TCIS-2 - 1008111020Document5 pagesZenitel - TCIS-2 - 1008111020Stefano FelappiNo ratings yet
- Basic Antenna Concepts: Prepared By: Zalak Patel Department: E & CDocument27 pagesBasic Antenna Concepts: Prepared By: Zalak Patel Department: E & CZalakNo ratings yet
- Altivar Process ATV900 - ATV930D90N4Document14 pagesAltivar Process ATV900 - ATV930D90N4anon_448781499No ratings yet
- DIR-632 A1 QIG v1.00 (DI)Document28 pagesDIR-632 A1 QIG v1.00 (DI)P Carrero HurtadoNo ratings yet
- Mason's RuleDocument1 pageMason's RuleAdarsh Bandi100% (1)
- Friedman BE100: Plugin ManualDocument20 pagesFriedman BE100: Plugin ManualPete SklaroffNo ratings yet
- Yamaha GC2020C Air Compressor User ManualDocument50 pagesYamaha GC2020C Air Compressor User ManualUmberto RosaNo ratings yet
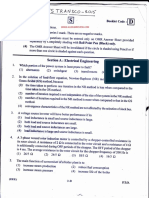
- Ts Transco - 2015 QPDocument13 pagesTs Transco - 2015 QPDINESHNo ratings yet
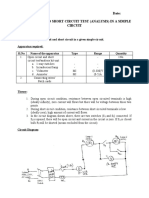
- Open and Short Circuit Analysis in Simple CircuitsDocument2 pagesOpen and Short Circuit Analysis in Simple CircuitsCOLD FIRENo ratings yet
- User ManualDocument29 pagesUser ManualAli MasyhurNo ratings yet
- L336i E SUPER LIGHT Protection Relay Test SetDocument1 pageL336i E SUPER LIGHT Protection Relay Test SetAdrian PramantaNo ratings yet
- C5993 PanasonicDocument3 pagesC5993 PanasonicAdrian RusuNo ratings yet
- 52-199x Series Digital MixersDocument17 pages52-199x Series Digital MixersBelisando Zubiaur PerniaNo ratings yet
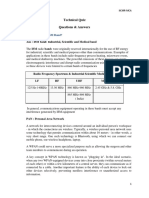
- Technical Quiz Questions & Answers: Q. What Is PAN, ISM Band?Document5 pagesTechnical Quiz Questions & Answers: Q. What Is PAN, ISM Band?Amit JajuNo ratings yet
- BallastDocument9 pagesBallastHenry PalNo ratings yet