Robotics Lab Lecture #5: Purpose of This Lecture
Robotics Lab Lecture #5: Purpose of This Lecture
Download as pdf or txt
You might also like
- Nap Form 3 - Request For DisposalDocument14 pagesNap Form 3 - Request For DisposalChristine Joy CorpusNo ratings yet
- 01 Overview Aplikasi PLN CRMDocument37 pages01 Overview Aplikasi PLN CRMsutejobelanti siamNo ratings yet
- Cable Harness Connections For Additional Switches Cable Harness For Additional SwitchesDocument4 pagesCable Harness Connections For Additional Switches Cable Harness For Additional Switchesmbpaja100% (1)
- 2024 of ShootingDocument6 pages2024 of Shootinggetachewbonga09No ratings yet
- Random Walk 1-D and 2-DDocument11 pagesRandom Walk 1-D and 2-DAndri 'xflash' Rahmadhani100% (3)
- Generation of Synthetic Curves and Surfaces Using Matlab: - Nishant ChandrashekharDocument23 pagesGeneration of Synthetic Curves and Surfaces Using Matlab: - Nishant ChandrashekharvinayakNo ratings yet
- Maths Lab Manual 22mats11Document37 pagesMaths Lab Manual 22mats11ANU100% (1)
- Cs231a Midterm SolutionsDocument17 pagesCs231a Midterm SolutionsAnonymous Yyl2ChjaD8No ratings yet
- Set - 05 - 2023ht30061 Akash Gonjari - Robotics Lab ExamDocument37 pagesSet - 05 - 2023ht30061 Akash Gonjari - Robotics Lab ExamAkash GonjariNo ratings yet
- Graphing With Higher-Order ProceduresDocument11 pagesGraphing With Higher-Order ProceduresdarkunNo ratings yet
- NSPCH 4Document106 pagesNSPCH 4Thangadurai Senthil Ram PrabhuNo ratings yet
- Computer GraphicsDocument325 pagesComputer GraphicssenathipathikNo ratings yet
- Robotics1 12.01.11Document8 pagesRobotics1 12.01.11asalifew belachewNo ratings yet
- M2an 1977 11 1 93 0Document16 pagesM2an 1977 11 1 93 0Zina SawafNo ratings yet
- FinalExam SolutionDocument11 pagesFinalExam SolutionpranavjibhakateNo ratings yet
- Major Assignment 1 2017Document9 pagesMajor Assignment 1 2017Gurparkash Singh SohiNo ratings yet
- Potential Assignment MCEN90008 2016Document9 pagesPotential Assignment MCEN90008 2016Umar AshrafNo ratings yet
- Robotics1 13.02.06 PDFDocument9 pagesRobotics1 13.02.06 PDFasalifew belachewNo ratings yet
- Anna's AssignmentDocument16 pagesAnna's Assignmenttumaini murrayNo ratings yet
- TT IimDocument106 pagesTT IimrakeshNo ratings yet
- Inverse Kinematics Problem (Ikp) of 6-Dof Manipulator by Locally Recurrent Neural Networks (LRNNS)Document5 pagesInverse Kinematics Problem (Ikp) of 6-Dof Manipulator by Locally Recurrent Neural Networks (LRNNS)yousif al mashhadanyNo ratings yet
- Computer Graphics Part 3 18Document10 pagesComputer Graphics Part 3 18Muhammad UsmaanNo ratings yet
- 2 - Circle Drawing AlgorithmsDocument7 pages2 - Circle Drawing Algorithmsfatmaserry16No ratings yet
- Numerical Solution RL CircuitDocument11 pagesNumerical Solution RL CircuitSachin Kumar Bhoi0% (1)
- Laplace TransformDocument34 pagesLaplace TransformNasaii Ray100% (1)
- Use of Fast Fourier Transforms For Solving Partial Differential Equations in PhysicsDocument26 pagesUse of Fast Fourier Transforms For Solving Partial Differential Equations in PhysicsEduardo SandovalNo ratings yet
- CGA TILL LAB 9 (1) RemovedDocument18 pagesCGA TILL LAB 9 (1) Removedsalonia.it.21No ratings yet
- Nov/Dec 2008 CS1354 Answer Key B.E / B.Tech Degree Examination Nov/Dec 2008 R 3261 CS1354 Computer Graphics and Multimedia Part ADocument10 pagesNov/Dec 2008 CS1354 Answer Key B.E / B.Tech Degree Examination Nov/Dec 2008 R 3261 CS1354 Computer Graphics and Multimedia Part AgspriyadarshiniNo ratings yet
- ArticleDocument14 pagesArticlealipirkhedriNo ratings yet
- Numerical Computation Portfolio: Bisection Method Objective: Bisection MethodDocument30 pagesNumerical Computation Portfolio: Bisection Method Objective: Bisection MethodAlee SajjadNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- Track BallDocument30 pagesTrack Ballandresz11No ratings yet
- Lovely Professional University: DeclarationDocument5 pagesLovely Professional University: DeclarationShekhar RanaNo ratings yet
- S Domain AnalysisDocument9 pagesS Domain Analysisfaisal140No ratings yet
- OlgN Line Clipping Algorithm in E2Document14 pagesOlgN Line Clipping Algorithm in E2jared.demarsNo ratings yet
- System Analysis Using Laplace Transform: 1. PolynomialsDocument11 pagesSystem Analysis Using Laplace Transform: 1. PolynomialsnekuNo ratings yet
- Digital Signal Processing Lab Manual HandwrittenDocument9 pagesDigital Signal Processing Lab Manual HandwrittenSHOURYA KUMAR SINGHNo ratings yet
- A1 Priyanshu Dutta MathematicsDocument8 pagesA1 Priyanshu Dutta MathematicspshuNo ratings yet
- Applied Calculus: Credit Hour: 3Document39 pagesApplied Calculus: Credit Hour: 3bigbangmelvanNo ratings yet
- Sformations in 2 Dimensions PDFDocument16 pagesSformations in 2 Dimensions PDFSuada Bőw WéěžýNo ratings yet
- Computer GraphicsDocument59 pagesComputer GraphicsKanika KadianNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- Exam 1 SDocument6 pagesExam 1 S292bpmNo ratings yet
- Interpolasi Lagrange Contoh KodeDocument8 pagesInterpolasi Lagrange Contoh KodeSion HalimNo ratings yet
- Vector Valued FunctionsDocument75 pagesVector Valued Functionsfarwa jabinNo ratings yet
- Cal211-CC05-GROUP 8Document11 pagesCal211-CC05-GROUP 8danh.tran214No ratings yet
- CG Full SemDocument48 pagesCG Full SemsaiNo ratings yet
- Comp Graphics Asgnmt 2 PDFDocument14 pagesComp Graphics Asgnmt 2 PDFWelly ManuelNo ratings yet
- DSP File Alk-2Document31 pagesDSP File Alk-2vijetathekingNo ratings yet
- 2nd Sem Apr 2022Document12 pages2nd Sem Apr 2022rukkiya253No ratings yet
- Chapter 9-Parametric Equations and Polar CooordinatesDocument80 pagesChapter 9-Parametric Equations and Polar CooordinatesRiyad MohammedNo ratings yet
- Robotics Lab Lecture #4: Purpose of This LectureDocument5 pagesRobotics Lab Lecture #4: Purpose of This LectureSonosoNo ratings yet
- Chapter 14 - Vector CalculusDocument86 pagesChapter 14 - Vector CalculusRais KohNo ratings yet
- Theodorus Spiral - GeometriaDocument13 pagesTheodorus Spiral - GeometriaarantheoNo ratings yet
- Gokhale Education Society's R. H. Sapat College of Engineering, Management Studies & Research, Nashik-422005 Department of Computer EngineeringDocument9 pagesGokhale Education Society's R. H. Sapat College of Engineering, Management Studies & Research, Nashik-422005 Department of Computer Engineeringkothawadeaniket5515No ratings yet
- Exercise 10 ACADO Code GenerationDocument2 pagesExercise 10 ACADO Code Generationwenhui.cao96No ratings yet
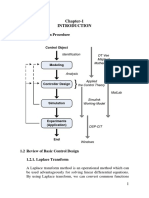
- Chapter-1: 1.1 Control Design ProcedureDocument23 pagesChapter-1: 1.1 Control Design ProcedureWildan MumtazNo ratings yet
- Calculus of Variation and Image Processing: Scalar ProductDocument9 pagesCalculus of Variation and Image Processing: Scalar ProductAditya TatuNo ratings yet
- dg1 hw1 SolutionsDocument8 pagesdg1 hw1 Solutionschristophercabezas93No ratings yet
- Csfile Final ShubhamDocument25 pagesCsfile Final ShubhamShiwank unknown gamer GuptaNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Robotics Assignment (Num. 1)Document1 pageRobotics Assignment (Num. 1)SonosoNo ratings yet
- Robotics Lab Lecture #4: Purpose of This LectureDocument5 pagesRobotics Lab Lecture #4: Purpose of This LectureSonosoNo ratings yet
- UART Ex5 PDFDocument5 pagesUART Ex5 PDFSonosoNo ratings yet
- Robotics Lab Lecture #3: Purpose of This LectureDocument4 pagesRobotics Lab Lecture #3: Purpose of This LectureSonosoNo ratings yet
- T C E E T: Embedded System Lab Experiment #4 LCD ProgrammingDocument7 pagesT C E E T: Embedded System Lab Experiment #4 LCD ProgrammingSonosoNo ratings yet
- Robotics PDFDocument25 pagesRobotics PDFSonosoNo ratings yet
- Double Dragon Neon Switch NSP XCI NSZDocument1 pageDouble Dragon Neon Switch NSP XCI NSZDouglas LemusNo ratings yet
- 4 BalamDocument1 page4 BalamARTHAGINANo ratings yet
- Letter of IntentDocument2 pagesLetter of IntentRamilNo ratings yet
- PnID Reaktor MetanolDocument4 pagesPnID Reaktor MetanolRahmasari Nur SetyonoNo ratings yet
- Research MethodologyDocument22 pagesResearch MethodologystefhaniekaniaNo ratings yet
- Microsoft Office in Hindi (WWW - GkNotesPDF.com)Document12 pagesMicrosoft Office in Hindi (WWW - GkNotesPDF.com)Ξυηκηοωηξ βογNo ratings yet
- Final Paper Chapter 1 4 But Need To EditDocument31 pagesFinal Paper Chapter 1 4 But Need To EditAlpha CapacitorNo ratings yet
- Regarding The Change of Names Mentioned in The Document, Such As Mitsubishi Electric and Mitsubishi XX, To Renesas Technology CorpDocument10 pagesRegarding The Change of Names Mentioned in The Document, Such As Mitsubishi Electric and Mitsubishi XX, To Renesas Technology CorpTahar BenacherineNo ratings yet
- The Correlation of Social Media To The Grade 11 General Academic Strand Students Behavior in The School of Meycauayan National High SchoolDocument7 pagesThe Correlation of Social Media To The Grade 11 General Academic Strand Students Behavior in The School of Meycauayan National High SchoolAnsel Francis RapsingNo ratings yet
- Precast Concrete Market PDFDocument8 pagesPrecast Concrete Market PDFGan DorjNo ratings yet
- The Explosion of No. 5 Blast Furnace, Corus UK LTD, Port TalbotDocument60 pagesThe Explosion of No. 5 Blast Furnace, Corus UK LTD, Port TalbotEng Mahmoud KhairyNo ratings yet
- Section A All Questions in This Section. A1 The Front of A Package For A Ready Meal Is Shown BelowDocument4 pagesSection A All Questions in This Section. A1 The Front of A Package For A Ready Meal Is Shown BelowbezalelolushakinNo ratings yet
- HVAC CalculationDocument8 pagesHVAC CalculationNewaz KabirNo ratings yet
- Dewalt Backpack Sprayer ManualDocument24 pagesDewalt Backpack Sprayer ManualFrank MorrisNo ratings yet
- T-1000 Telependulum - EN 00Document6 pagesT-1000 Telependulum - EN 00Oswaldo EscuderoNo ratings yet
- 0300010ENDocument92 pages0300010ENgjaniak@yahooNo ratings yet
- Test Results For 3E4A: Test Node: 3e4a - Motion Cueing Signature Performance - Configuration Change, Flap, Flight (2c2a)Document16 pagesTest Results For 3E4A: Test Node: 3e4a - Motion Cueing Signature Performance - Configuration Change, Flap, Flight (2c2a)Danang YunantoNo ratings yet
- DataPump PDFDocument15 pagesDataPump PDFMahesh kumarNo ratings yet
- Charles Audet, Warren Hare - Derivative-Free and Blackbox Optimization-Springer (2017)Document304 pagesCharles Audet, Warren Hare - Derivative-Free and Blackbox Optimization-Springer (2017)Himadri Sen GuptaNo ratings yet
- Ooredoo Messaging Solution-Business Bulk SMS MMSDocument14 pagesOoredoo Messaging Solution-Business Bulk SMS MMSHasan RteilNo ratings yet
- Floyd AlgorithmDocument12 pagesFloyd Algorithmco.tranminhco1509No ratings yet
- HINCOL - EMULSION - Chennai (16 10 2022)Document1 pageHINCOL - EMULSION - Chennai (16 10 2022)praveen kumar sainiNo ratings yet
- MyPGP enDocument8 pagesMyPGP enGustaw OchudzkiNo ratings yet
- Scanned With Any ScannerDocument316 pagesScanned With Any Scannernasrullah2958100% (1)
- Dell Optimizer BrochureDocument14 pagesDell Optimizer BrochureMuhammad Faris Haikal Bin Yaacob (Rizz)No ratings yet
- Hourly Billing Is NutsDocument114 pagesHourly Billing Is NutsDavide GhezziNo ratings yet
- Laporan Hasil Praktikum Desain Eksperimen I Desain Blok Tak Lengkap AcakDocument6 pagesLaporan Hasil Praktikum Desain Eksperimen I Desain Blok Tak Lengkap AcakSalsabila SalmaNo ratings yet