0% found this document useful (0 votes)
104 viewsBodies or Fluids That Are at Rest or in Motions.: Dynamics
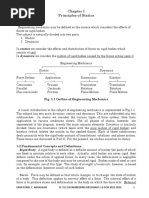
1. Engineering mechanics is the branch of physics that deals with forces and their effects on motion. Statics considers forces on bodies at rest or in constant motion, while dynamics considers accelerated motion.
2. The document defines key terms like rigid body, mass, weight, force, and discusses concepts such as the principles of transmissibility and axioms of mechanics.
3. Methods for analyzing force systems are presented, including resolving forces into planar and spatial components, finding the resultant of concurrent and non-concurrent forces using the parallelogram law and triangle law.
Uploaded by
James MichaelCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
104 viewsBodies or Fluids That Are at Rest or in Motions.: Dynamics
1. Engineering mechanics is the branch of physics that deals with forces and their effects on motion. Statics considers forces on bodies at rest or in constant motion, while dynamics considers accelerated motion.
2. The document defines key terms like rigid body, mass, weight, force, and discusses concepts such as the principles of transmissibility and axioms of mechanics.
3. Methods for analyzing force systems are presented, including resolving forces into planar and spatial components, finding the resultant of concurrent and non-concurrent forces using the parallelogram law and triangle law.
Uploaded by
James MichaelCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 23