Embedded Linux Server
Embedded Linux Server
Download as docx, pdf, or txt
You might also like
- CBLM Computer Systems Servicing NC IIDocument97 pagesCBLM Computer Systems Servicing NC IIDonald Bose Mandac80% (61)
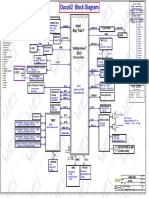
- Ducati2 SCH 20140506 0930 PDFDocument34 pagesDucati2 SCH 20140506 0930 PDFRiza VirsadaNo ratings yet
- Embedded Linux Best PracticesDocument17 pagesEmbedded Linux Best PracticesLokesh VenkateshaiahNo ratings yet
- Mastering Embedded Linux Programming: Create fast and reliable embedded solutions with Linux 5.4 and the Yocto Project 3.1 (Dunfell)From EverandMastering Embedded Linux Programming: Create fast and reliable embedded solutions with Linux 5.4 and the Yocto Project 3.1 (Dunfell)No ratings yet
- Linux Device Driver Development: Everything you need to start with device driver development for Linux kernel and embedded LinuxFrom EverandLinux Device Driver Development: Everything you need to start with device driver development for Linux kernel and embedded LinuxNo ratings yet
- Embedded Systems Architecture: Design and write software for embedded devices to build safe and connected systemsFrom EverandEmbedded Systems Architecture: Design and write software for embedded devices to build safe and connected systemsNo ratings yet
- Embedded Linux Systems With The Yocto Projects PresentationDocument64 pagesEmbedded Linux Systems With The Yocto Projects PresentationBill Gates100% (1)
- How To Create Portable QT Developing EnvironmentDocument5 pagesHow To Create Portable QT Developing Environmentnguyendinhminh5908No ratings yet
- Embedded Linux Development using Yocto Projects - Second Edition: Learn to leverage the power of Yocto Project to build efficient Linux-based productsFrom EverandEmbedded Linux Development using Yocto Projects - Second Edition: Learn to leverage the power of Yocto Project to build efficient Linux-based productsNo ratings yet
- Sitara Linux Training - Hands On With QTDocument43 pagesSitara Linux Training - Hands On With QTKyle HolderNo ratings yet
- Build Linux Using YoctoDocument55 pagesBuild Linux Using Yoctojacob haNo ratings yet
- Linux Kernel SlidesDocument480 pagesLinux Kernel SlidesPARTH PATELNo ratings yet
- Booting and Shutting DownDocument97 pagesBooting and Shutting DownRehan HalaiNo ratings yet
- Serial Port CommunicationDocument39 pagesSerial Port Communicationapi-3738664100% (5)
- Embedded Linux Course Slides PDFDocument571 pagesEmbedded Linux Course Slides PDFranbumails100% (1)
- IntelAcademic IoT 07 C-CPP YoctoDocument23 pagesIntelAcademic IoT 07 C-CPP Yoctogabrielw6No ratings yet
- BeagleBone and LinuxDocument11 pagesBeagleBone and LinuxĐỗ Minh Quốc75% (4)
- BitBake User ManualDocument68 pagesBitBake User ManualSajjad AhmedNo ratings yet
- Embedded Linux WorkshopsDocument6 pagesEmbedded Linux WorkshopsAadhi Botlagunta100% (1)
- UCD Linux Security ChecklistDocument5 pagesUCD Linux Security ChecklisttestNo ratings yet
- Understanding Kernel OopsDocument7 pagesUnderstanding Kernel OopsgopihcNo ratings yet
- LF Pub History Embedded LinuxDocument21 pagesLF Pub History Embedded LinuxciarmelNo ratings yet
- Porting GuideDocument4 pagesPorting Guideboot_sectorzNo ratings yet
- BeagleBone Black Running Ubuntu, Part 1Document4 pagesBeagleBone Black Running Ubuntu, Part 1Raymond T. Hightower100% (2)
- Port Communications Using C#Document5 pagesPort Communications Using C#thomhobieNo ratings yet
- Android For The BeagleBone Black - Sample ChapterDocument17 pagesAndroid For The BeagleBone Black - Sample ChapterPackt PublishingNo ratings yet
- Yocto Project and Openembedded Training Lab Book: April 9, 2018Document26 pagesYocto Project and Openembedded Training Lab Book: April 9, 2018ronoskiNo ratings yet
- Embedded Linux Handson Tutorial ZedBoardDocument46 pagesEmbedded Linux Handson Tutorial ZedBoardecd4282003No ratings yet
- Programming and Interfacing The 8051 MicrocontrollerDocument9 pagesProgramming and Interfacing The 8051 Microcontrollernaveedhalamzai0% (2)
- An1388 Pic32 BootloaderDocument16 pagesAn1388 Pic32 Bootloadercroud_freak100% (1)
- Esp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enDocument28 pagesEsp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enFranco Rivadeneyra100% (1)
- File System Embedded LinuxDocument5 pagesFile System Embedded Linuxmedake100% (2)
- Senior Software Firmware Engineer in Sacramento CA Resume Keith WalbergDocument2 pagesSenior Software Firmware Engineer in Sacramento CA Resume Keith WalbergKeithWalbergNo ratings yet
- Introduction To The BeagleBone Black PDFDocument15 pagesIntroduction To The BeagleBone Black PDFShivam Pande100% (1)
- Openwrt101 Build Embedded Systems in 30 MinutesDocument17 pagesOpenwrt101 Build Embedded Systems in 30 MinutesnpssgNo ratings yet
- Network Programming With PerlDocument79 pagesNetwork Programming With PerlWawanNo ratings yet
- Getting Startted With GNU Radio and USRPDocument6 pagesGetting Startted With GNU Radio and USRPAdeel AhmadNo ratings yet
- Embedded Linux: Kernel Make (Compressed With Boot)Document12 pagesEmbedded Linux: Kernel Make (Compressed With Boot)rammohan2bNo ratings yet
- Simics User Guide For LinuxDocument166 pagesSimics User Guide For Linuxlohit24No ratings yet
- Esp32 Hardware Design Guidelines enDocument35 pagesEsp32 Hardware Design Guidelines enEsa AndreaNo ratings yet
- Linux - Sign Virtual Box Modules (Vboxdrv, Vboxnetflt, Vboxnetadp, Vboxpci) Centos 8 - Stack OverflowDocument3 pagesLinux - Sign Virtual Box Modules (Vboxdrv, Vboxnetflt, Vboxnetadp, Vboxpci) Centos 8 - Stack Overflowdragan2006No ratings yet
- Linux Boot SequenceDocument11 pagesLinux Boot SequencekavigunNo ratings yet
- Systemd FullDocument84 pagesSystemd FullAnonymous ozd4mWNo ratings yet
- OpenWrt Dev TutorialDocument11 pagesOpenWrt Dev TutorialraphaelgavaNo ratings yet
- Contiki SlidesDocument90 pagesContiki SlidesledoantuanNo ratings yet
- Special Edition Using Visual C++ 6.0Document464 pagesSpecial Edition Using Visual C++ 6.0Tony AntonioNo ratings yet
- Embedded LinuxDocument64 pagesEmbedded Linuxwindsonsm100% (1)
- Embedded Linux RealtimeDocument76 pagesEmbedded Linux RealtimeLenon Raubach Tuchtenhagen100% (1)
- Access-Serial-Ports With Visual Baisc PDFDocument5 pagesAccess-Serial-Ports With Visual Baisc PDFJarira DanghirunNo ratings yet
- About Software ToolsDocument40 pagesAbout Software ToolsFurqon Madaz XskaMaticNo ratings yet
- Introduction To Device Trees PDFDocument34 pagesIntroduction To Device Trees PDFm3y54m100% (1)
- Embedded Linux Development With Yocto Project Sample ChapterDocument11 pagesEmbedded Linux Development With Yocto Project Sample ChapterPackt Publishing100% (1)
- Docker NotesDocument17 pagesDocker Notesbharatvarshney2025No ratings yet
- Device Trree Explained For LinuxDocument7 pagesDevice Trree Explained For LinuxapaponderNo ratings yet
- Linux Kernel ProgrammingDocument20 pagesLinux Kernel ProgrammingNeependra KhareNo ratings yet
- Tutorial On Parallel Port InterfacingDocument7 pagesTutorial On Parallel Port InterfacingVasilis TsekourasNo ratings yet
- U Boot ManualDocument16 pagesU Boot ManualBritoJuniorNo ratings yet
- Ucos II IntroDocument49 pagesUcos II IntroprincegirishNo ratings yet
- Mastering Embedded Linux Programming - Second EditionFrom EverandMastering Embedded Linux Programming - Second EditionRating: 5 out of 5 stars5/5 (1)
- OSY - Chapter1Document11 pagesOSY - Chapter1Rupesh BavgeNo ratings yet
- Operating System 1 Com 311 Cte 223 ND 11 Ce HND 1 CSDocument1 pageOperating System 1 Com 311 Cte 223 ND 11 Ce HND 1 CSibraheemu60No ratings yet
- ES Module-3Document19 pagesES Module-3Kusuma NamanaNo ratings yet
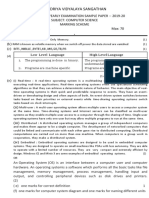
- CLASS XI (COMPUTER SCIENCE) HALF YEARLY MS BHOPAL RegionDocument8 pagesCLASS XI (COMPUTER SCIENCE) HALF YEARLY MS BHOPAL RegionDeepika AggarwalNo ratings yet
- Course FileDocument36 pagesCourse FileElakkiya N.SNo ratings yet
- CMPE 522-Embedded Systems-Adeel PashaDocument3 pagesCMPE 522-Embedded Systems-Adeel PashaZia AzamNo ratings yet
- Uc OS III The Real-Time Kernel For The Kinectis ARM Cortex-M4Document934 pagesUc OS III The Real-Time Kernel For The Kinectis ARM Cortex-M4Edison Llerena100% (1)
- Introduction To FreeRTOSDocument75 pagesIntroduction To FreeRTOSឆាម វ៉ាន់នូវNo ratings yet
- Mod 4Document19 pagesMod 4PraneethNo ratings yet
- Bca C101 SM04Document7 pagesBca C101 SM04mfstore9548No ratings yet
- Study of Micro C Os IIDocument4 pagesStudy of Micro C Os IInilarabiNo ratings yet
- Operating System (Osy) HarshalDocument15 pagesOperating System (Osy) HarshalHarshal ukeyNo ratings yet
- File Management & IO Services in RTOSDocument18 pagesFile Management & IO Services in RTOSjayanthimurthyNo ratings yet
- The Real-Time Driver Model and First ApplicationsDocument8 pagesThe Real-Time Driver Model and First ApplicationsJhonatan GutierrezNo ratings yet
- Design Patterns Concurrency PatternDocument11 pagesDesign Patterns Concurrency Patternhaider aliNo ratings yet
- Osy Micro Project HarshDocument13 pagesOsy Micro Project HarshhatrrNo ratings yet
- Virtualizing The TCU of BMW's 8 Speed TransmissionDocument7 pagesVirtualizing The TCU of BMW's 8 Speed TransmissionSergiu EneNo ratings yet
- SDL Standard Drawing Library: C Library Reference ManualDocument184 pagesSDL Standard Drawing Library: C Library Reference ManualcocochaNo ratings yet
- IJACSA Volume2No2Document146 pagesIJACSA Volume2No2Editor IJACSA100% (1)
- Unit 3: Embedded Firmware & Hardware Design and DevelopmentDocument22 pagesUnit 3: Embedded Firmware & Hardware Design and DevelopmentAakarsh Kumar100% (1)
- OS Sanchit Sir NotesDocument203 pagesOS Sanchit Sir Noteskumar.22bce9591No ratings yet
- Model Qustion Paper Jntu RtosDocument2 pagesModel Qustion Paper Jntu RtosmNo ratings yet
- Preemptive and Non-Preemptive SchedulingDocument5 pagesPreemptive and Non-Preemptive Schedulingezekiel nyamuNo ratings yet
- Message Queues Mailboxes and Pipes RTOS PDFDocument4 pagesMessage Queues Mailboxes and Pipes RTOS PDFya vika100% (1)
- Embedded Systems Interview Questions - Embedded Tech HubDocument9 pagesEmbedded Systems Interview Questions - Embedded Tech HubKarthik GNo ratings yet
- VTU - MTECH - VLSI Design& Embedded Systems Syllabus - RevisedDocument37 pagesVTU - MTECH - VLSI Design& Embedded Systems Syllabus - RevisedAshik PadmanabhaNo ratings yet
- Types of RTOS: Hard Real TimeDocument3 pagesTypes of RTOS: Hard Real Timeabhi_badNo ratings yet
- Vxworks Device Driver Developers Guide Vol1 6.6Document146 pagesVxworks Device Driver Developers Guide Vol1 6.6Prashant SinghNo ratings yet
- Process SchedulingDocument80 pagesProcess Schedulingasfvkjsv asgbaegbNo ratings yet