Automation of Taxiing: Jaroslav Burs Ik, Jakub Kraus, Marek Stumper
Automation of Taxiing: Jaroslav Burs Ik, Jakub Kraus, Marek Stumper
Download as pdf or txt
You might also like
- Kelompok 14 - Tugas 6Document7 pagesKelompok 14 - Tugas 6brian yeremiasNo ratings yet
- Manston - Approach MapDocument1 pageManston - Approach MapNoNightFlightsNo ratings yet
- Sion ApproachDocument1 pageSion ApproachAndrei NecuţăNo ratings yet
- AircraftDocument6 pagesAircraftAkshat GaurNo ratings yet
- Masking and Multipath Analysis For Unmanned Aerial Vehicles in An Urban EnvironmentDocument9 pagesMasking and Multipath Analysis For Unmanned Aerial Vehicles in An Urban EnvironmentSanjay Kumar ViswasNo ratings yet
- A Hybrid Localization Approach For Uav WITH INSTALLED MAPDocument6 pagesA Hybrid Localization Approach For Uav WITH INSTALLED MAPMy trickNo ratings yet
- מאמר רועי יוזביץ1Document10 pagesמאמר רועי יוזביץ1Dor Ben LavyNo ratings yet
- Elsarticle TemplateDocument24 pagesElsarticle Templatemohammedagag18No ratings yet
- Icect 2009 152Document5 pagesIcect 2009 152Anish ShahNo ratings yet
- 2013-A Multi-Layered Approach For Site Detection in UAS Emergency Landing Scenarios Using Geometry-Based Image SegmentationDocument7 pages2013-A Multi-Layered Approach For Site Detection in UAS Emergency Landing Scenarios Using Geometry-Based Image SegmentationMarcelo VieiraNo ratings yet
- (Asce) CP 1943-5487 0001013Document10 pages(Asce) CP 1943-5487 0001013deepak sureshNo ratings yet
- Stereo Vision Guiding For The Autonomous Landing oDocument13 pagesStereo Vision Guiding For The Autonomous Landing oIlyes BouzNo ratings yet
- Aircraft Taxi Route Planning For A SMGCS Based On Discrete EventDocument5 pagesAircraft Taxi Route Planning For A SMGCS Based On Discrete Eventelaheh.hassanzadeh6No ratings yet
- Autonomouslong rangenavigationinGNSS DeniedenvironmentDocument7 pagesAutonomouslong rangenavigationinGNSS Deniedenvironmentalrtf4No ratings yet
- Real-Time Navigation, Guidance, and Control of A UAV Using Low-Cost SensorsDocument6 pagesReal-Time Navigation, Guidance, and Control of A UAV Using Low-Cost SensorsJU EE 2021No ratings yet
- Unmanned Aerial Vehicles - Robotic Air Warfare 1917-2007Document94 pagesUnmanned Aerial Vehicles - Robotic Air Warfare 1917-2007mohanNo ratings yet
- Accurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Document8 pagesAccurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Andy FloresNo ratings yet
- Vision-Based Autonomous Navigation and Landing of An Unmanned Aerial Vehicle Using Natural LandmarksDocument6 pagesVision-Based Autonomous Navigation and Landing of An Unmanned Aerial Vehicle Using Natural LandmarksPrabhakar VarakalaNo ratings yet
- Drones - Parámetros de Vuelo - Atencio, Edison Plaza-Muñoz, Felipe Muñoz, Felipe Lozano-Galant, José Antonio - 2022 - ArtículoDocument17 pagesDrones - Parámetros de Vuelo - Atencio, Edison Plaza-Muñoz, Felipe Muñoz, Felipe Lozano-Galant, José Antonio - 2022 - ArtículoURIBE SUAREZ LAURA CAMILANo ratings yet
- GNSS Position Integrity in Urban Environments A Review of LiteratureDocument17 pagesGNSS Position Integrity in Urban Environments A Review of LiteraturePedro PereiraNo ratings yet
- 657-Article Text-2390-1-10-20240104Document9 pages657-Article Text-2390-1-10-20240104Mahdi AbdorrahimiNo ratings yet
- Age of Information Aware Trajectory Planning of UAVs in Intelligent Transportation Systems A Deep Learning ApproachDocument14 pagesAge of Information Aware Trajectory Planning of UAVs in Intelligent Transportation Systems A Deep Learning ApproachYoussef ameurNo ratings yet
- Moving Vehicle Detection and Tracking Based On OptDocument15 pagesMoving Vehicle Detection and Tracking Based On OptCARRILLO GABRIELNo ratings yet
- Air Borne GPSDocument32 pagesAir Borne GPSsamyalagarNo ratings yet
- Three-Dimensional UAV Routing With DeconflictionDocument16 pagesThree-Dimensional UAV Routing With Deconflictionchfarooq chfarooqNo ratings yet
- 3D Mapping of Pavement Distresses Using An Unmanned Aerial Vehicle (UAV) SystemDocument8 pages3D Mapping of Pavement Distresses Using An Unmanned Aerial Vehicle (UAV) SystemInnovación y Desarrollo DevimedNo ratings yet
- Aircraft Trajectory Prediction Made Easy With Predictive AnalyticsDocument10 pagesAircraft Trajectory Prediction Made Easy With Predictive AnalyticsDavid JosephNo ratings yet
- Ahmad, 2021Document15 pagesAhmad, 2021Faisal AliNo ratings yet
- Sensors 22 09797 v2 PDFDocument21 pagesSensors 22 09797 v2 PDFElenaNo ratings yet
- Ruzgiene, Biruté - The Surface Modelling Based On UAV PhotogrammetryDocument9 pagesRuzgiene, Biruté - The Surface Modelling Based On UAV PhotogrammetryjuanjoNo ratings yet
- LiDAR-Based Sensor Fusion SLAM and Localization FoDocument23 pagesLiDAR-Based Sensor Fusion SLAM and Localization FoFALAK FATIMANo ratings yet
- International Federation of Surveyors: FIGDocument5 pagesInternational Federation of Surveyors: FIGUnique2k17No ratings yet
- A Hybrid Integrity Solution For Precision Landing and GuidanceDocument10 pagesA Hybrid Integrity Solution For Precision Landing and GuidancehsajesNo ratings yet
- Real-Time UAS Guidance For Continuous Curved GNSS ApproachesDocument19 pagesReal-Time UAS Guidance For Continuous Curved GNSS ApproachesOlivier LaylyNo ratings yet
- Irjet V5i1080 PDFDocument4 pagesIrjet V5i1080 PDFUtkarsh VermaNo ratings yet
- Mayjune16 WPDocument10 pagesMayjune16 WPdong wangNo ratings yet
- Operational Evaluation of A GBAS System: Paulo EstevesDocument10 pagesOperational Evaluation of A GBAS System: Paulo EstevesFelix GarciasNo ratings yet
- Traffic Congestion Detection Using Deep LearningDocument3 pagesTraffic Congestion Detection Using Deep LearningEditor IJTSRDNo ratings yet
- Jurnal Teknologi: M T U A V M L PDocument5 pagesJurnal Teknologi: M T U A V M L PMohd Najib Mohd YasinNo ratings yet
- Comparative Study of Indoor Navigation S-1Document11 pagesComparative Study of Indoor Navigation S-1Jayashree T R 21PHD1140No ratings yet
- Traffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirDocument21 pagesTraffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirRezaei MNo ratings yet
- Fleet Management and Vehicle Routing Plan Using Dijkstra's Shortest Path AlgorithmDocument4 pagesFleet Management and Vehicle Routing Plan Using Dijkstra's Shortest Path AlgorithmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Counting Traffic Using Optical Flow Algorithm On Video Footage of A Complex CrossroadDocument5 pagesCounting Traffic Using Optical Flow Algorithm On Video Footage of A Complex CrossroadjuampicNo ratings yet
- Autonomous Flight in Unstructured and Unknown Indoor EnvironmentsDocument8 pagesAutonomous Flight in Unstructured and Unknown Indoor EnvironmentsJames KnotNo ratings yet
- Automated Vision-Based Recovery of A Rotary Wing Unmanned Aerial Vehicle Onto A Moving PlatformDocument18 pagesAutomated Vision-Based Recovery of A Rotary Wing Unmanned Aerial Vehicle Onto A Moving PlatformLong DươngNo ratings yet
- Paper - Masking and Multipath Analysis For UAVs in Urban Environments - DASC 2016 (09.08.2016)Document12 pagesPaper - Masking and Multipath Analysis For UAVs in Urban Environments - DASC 2016 (09.08.2016)Suraj BijahalliNo ratings yet
- Soporte de Estimación de Terreno en Tiempo Real Basada en Máquinas Vectoriales para Robots RastreadosDocument10 pagesSoporte de Estimación de Terreno en Tiempo Real Basada en Máquinas Vectoriales para Robots Rastreadosjhulmar Marquez CisnerosNo ratings yet
- 3autonomous CarDocument11 pages3autonomous CarJaya KumarNo ratings yet
- GNSS-Based Auto-Guidance in AgricultureDocument6 pagesGNSS-Based Auto-Guidance in AgricultureRodrigo Nogueira MartinsNo ratings yet
- Global Navigation Satellite Systems PerfDocument51 pagesGlobal Navigation Satellite Systems PerfOlivier LaylyNo ratings yet
- Training Autonomous Drones For Search and Rescue With Convolutional AutoencoderDocument47 pagesTraining Autonomous Drones For Search and Rescue With Convolutional Autoencoderamal.es23No ratings yet
- Unscented Kalman Filter For A Low Cost GNSS IMU Based Mobi 2024 Geodesy andDocument11 pagesUnscented Kalman Filter For A Low Cost GNSS IMU Based Mobi 2024 Geodesy andTuğçe DemirciNo ratings yet
- 2014 Artigo - Mobile 3D Mapping Unmanned Aerial VehicleDocument14 pages2014 Artigo - Mobile 3D Mapping Unmanned Aerial VehicleGlauber Jean Alves NarcisoNo ratings yet
- Remote Sensing: A Real Time Localization System For Vehicles Using Terrain-Based Time Series Subsequence MatchingDocument18 pagesRemote Sensing: A Real Time Localization System For Vehicles Using Terrain-Based Time Series Subsequence MatchingSeagul PeekNo ratings yet
- GPS Based Low Cost Intelligent Vehicle Tracking System (IVTS)Document5 pagesGPS Based Low Cost Intelligent Vehicle Tracking System (IVTS)Kiran KumarNo ratings yet
- Integration of GNSS Precise Point Positioning and Reduced Inertial Sensor System For Lane Level Car NavigationDocument16 pagesIntegration of GNSS Precise Point Positioning and Reduced Inertial Sensor System For Lane Level Car NavigationJasNo ratings yet
- Traffic Signal Control With Connected Vehicles: Noah J. Goodall, Brian L. Smith, and Byungkyu (Brian) ParkDocument10 pagesTraffic Signal Control With Connected Vehicles: Noah J. Goodall, Brian L. Smith, and Byungkyu (Brian) Parkpramo_dassNo ratings yet
- 09 Identification of ADS-B System Vulnerabilities and ThreatsDocument16 pages09 Identification of ADS-B System Vulnerabilities and ThreatsGeorgievNo ratings yet
- Sensors 19 01796Document26 pagesSensors 19 01796KrishNo ratings yet
- Flight Delay Detection in BIG Data AnalysisDocument11 pagesFlight Delay Detection in BIG Data AnalysisMashavia AhmadNo ratings yet
- 1537 2011 Mar Shenton Video Train PositioningDocument8 pages1537 2011 Mar Shenton Video Train PositioningLionel YepdieuNo ratings yet
- Single Landmark Distance-Based NavigationDocument8 pagesSingle Landmark Distance-Based NavigationAdeeba AliNo ratings yet
- Vehicle Infrastructure Integration: Unlocking Insights and Advancements through Computer VisionFrom EverandVehicle Infrastructure Integration: Unlocking Insights and Advancements through Computer VisionNo ratings yet
- Building Your Personal Brand: Inspired PerformanceDocument34 pagesBuilding Your Personal Brand: Inspired PerformanceafaqNo ratings yet
- Location Type Purchase Price Rent Size Ready/Off Plan Yield Price/SFDocument2 pagesLocation Type Purchase Price Rent Size Ready/Off Plan Yield Price/SFafaqNo ratings yet
- Application For Bank AccountDocument1 pageApplication For Bank AccountafaqNo ratings yet
- Mauritius High CommissionDocument1 pageMauritius High CommissionafaqNo ratings yet
- Location Type Purchase Price Rent Size Ready/Off Plan Yield Price/SFDocument1 pageLocation Type Purchase Price Rent Size Ready/Off Plan Yield Price/SFafaqNo ratings yet
- Final Price AED 10,579Document2 pagesFinal Price AED 10,579afaqNo ratings yet
- Group A: Bonus/penalty PointsDocument13 pagesGroup A: Bonus/penalty PointsafaqNo ratings yet
- S.No Names Amount (RS)Document4 pagesS.No Names Amount (RS)afaqNo ratings yet
- Final Price AED 3,188Document2 pagesFinal Price AED 3,188afaqNo ratings yet
- Location Type Purchase Price Rent Size Ready/Off Plan Yield Price/SFDocument1 pageLocation Type Purchase Price Rent Size Ready/Off Plan Yield Price/SFafaqNo ratings yet
- Frequently Asked Questions: Media Accreditation and Match Day AccessDocument7 pagesFrequently Asked Questions: Media Accreditation and Match Day AccessafaqNo ratings yet
- Application For A Business (Short Stay) VisaDocument10 pagesApplication For A Business (Short Stay) VisaafaqNo ratings yet
- View Booking - Pakistan International AirlinesDocument1 pageView Booking - Pakistan International Airlinesafaq100% (1)
- Visa Form - TouristDocument14 pagesVisa Form - TouristafaqNo ratings yet
- Australian High Commission-Islamabad: Tourist Visa RequirementsDocument2 pagesAustralian High Commission-Islamabad: Tourist Visa RequirementsafaqNo ratings yet
- Pakistan Telecommunication Authority Headquarters, F-5/1, Islamabad Application Form For Type Approval of Mobile Phone HandsetsDocument1 pagePakistan Telecommunication Authority Headquarters, F-5/1, Islamabad Application Form For Type Approval of Mobile Phone HandsetsafaqNo ratings yet
- Afaq Ahmed Soomro: EducationDocument2 pagesAfaq Ahmed Soomro: EducationafaqNo ratings yet
- Analysis and Prediction of COVID-19 Pandemic in Pakistan Using Time-Dependent SIR ModelDocument11 pagesAnalysis and Prediction of COVID-19 Pandemic in Pakistan Using Time-Dependent SIR ModelafaqNo ratings yet
- PSL 2019Document3 pagesPSL 2019afaqNo ratings yet
- CH - No Channel Name CH - No Channel Name Karachi Channel List - AnalogDocument1 pageCH - No Channel Name CH - No Channel Name Karachi Channel List - AnalogafaqNo ratings yet
- HandbookofObstericsandGynaecology PDFDocument236 pagesHandbookofObstericsandGynaecology PDFafaqNo ratings yet
- 2020-21 International-Schedule WebDocument1 page2020-21 International-Schedule WebafaqNo ratings yet
- Immerse Yourself in Theater-Quality Sound: DHT-S316Document2 pagesImmerse Yourself in Theater-Quality Sound: DHT-S316afaqNo ratings yet
- N.J.V. Govt. Girls Higher Sec. School Sindhi Medium Karachi No. NJV/GGHSS/SM/ /2015. Dated: / /2015Document1 pageN.J.V. Govt. Girls Higher Sec. School Sindhi Medium Karachi No. NJV/GGHSS/SM/ /2015. Dated: / /2015afaqNo ratings yet
- Nav-III, Chart Work PPT (2) (6541)Document62 pagesNav-III, Chart Work PPT (2) (6541)Sangram ShelarNo ratings yet
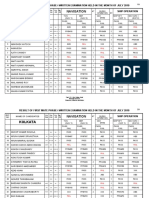
- 1stmate PhaseI Kol July10Document9 pages1stmate PhaseI Kol July10Anamika SinghNo ratings yet
- OPRNDocument23 pagesOPRNHumair KhanNo ratings yet
- WPT Latitude Longitude Course Distance DMG DTG: Samarinda To SingaporeDocument2 pagesWPT Latitude Longitude Course Distance DMG DTG: Samarinda To SingaporeFajar GemilangNo ratings yet
- Airport Information: Details For SAMUNGLI INTLDocument12 pagesAirport Information: Details For SAMUNGLI INTLkjhfjkfhgjkdfhgjdkfNo ratings yet
- EssayDocument4 pagesEssayMuyano, Louis AnthonyNo ratings yet
- Afghanistan Region. North EasternDocument71 pagesAfghanistan Region. North EasternJordi PuigneroNo ratings yet
- M.V AFFLATUS & WEN YUE Collision Report by China MSADocument23 pagesM.V AFFLATUS & WEN YUE Collision Report by China MSAJasper AngNo ratings yet
- 02 Hydrofest2015-Surface PositioningDocument38 pages02 Hydrofest2015-Surface PositioningkingcoffeeNo ratings yet
- Gen Nav Ol 3Document26 pagesGen Nav Ol 3Kashmina BhambhaniNo ratings yet
- GPS 1Document24 pagesGPS 1SaChibvuri JeremiahNo ratings yet
- Epwr Rwy29Document3 pagesEpwr Rwy29piwowarczykptNo ratings yet
- Forecast OF40mk3Document7 pagesForecast OF40mk3Blue BetaNo ratings yet
- RPLC/CRK Angeles City, Philippines: Cab Vor DmeDocument30 pagesRPLC/CRK Angeles City, Philippines: Cab Vor DmeMike BaldwinNo ratings yet
- Lria/Ias Iasi, Romania: Abolo 1A, Arpig 1A Unira 1ADocument10 pagesLria/Ias Iasi, Romania: Abolo 1A, Arpig 1A Unira 1Adownload downloadNo ratings yet
- QP LSC Q3023 Courier Delivery ExecutiveDocument29 pagesQP LSC Q3023 Courier Delivery ExecutiveAbhishek ThakurNo ratings yet
- Furuno-Marine Radar OmDocument421 pagesFuruno-Marine Radar OmWindi RahmadiniNo ratings yet
- Ud11t5104 - ImiDocument2 pagesUd11t5104 - Imikm11102004No ratings yet
- Mekaniko On The Go: An Online Mechanic Mobile Application: A System Analysis and Design ProjectDocument8 pagesMekaniko On The Go: An Online Mechanic Mobile Application: A System Analysis and Design ProjectMarco MagdaelNo ratings yet
- Thessaloniki / Makedonia Standard Departure Chart Instrument (Sid) - IcaoDocument2 pagesThessaloniki / Makedonia Standard Departure Chart Instrument (Sid) - IcaosamNo ratings yet
- VOR/DME/ADF Navigation: EUROCONTROL Guidance Notes For PilotsDocument2 pagesVOR/DME/ADF Navigation: EUROCONTROL Guidance Notes For Pilotsphamtung6789No ratings yet
- Planisphere 25N en PDFDocument6 pagesPlanisphere 25N en PDFAman SinghNo ratings yet
- Military Map Reading: Version 2.0 Dated December 2010Document44 pagesMilitary Map Reading: Version 2.0 Dated December 2010Ron FisherNo ratings yet
- Topographic Map of Indian CreekDocument1 pageTopographic Map of Indian CreekHistoricalMapsNo ratings yet
- FMS CMA-900 930-600006-060 Operators Manual 606Document334 pagesFMS CMA-900 930-600006-060 Operators Manual 606esedgar0% (1)
- Operations Circular: OC NO 11 OF 2014 Date: 04 SEPT. 2014Document36 pagesOperations Circular: OC NO 11 OF 2014 Date: 04 SEPT. 2014mehul da aviatorNo ratings yet
- Nav. 3 PrelimDocument2 pagesNav. 3 PrelimMark Daniel Millena50% (2)