Lesson 14: Transfer Functions of DC Motors: ET 438a Automatic Control Systems Technology
Lesson 14: Transfer Functions of DC Motors: ET 438a Automatic Control Systems Technology
Download as ppsx, pdf, or txt
You might also like
- QUBE-Servo 2 First Principles Modeling Workbook (Student)Document6 pagesQUBE-Servo 2 First Principles Modeling Workbook (Student)Albert ForeroNo ratings yet
- EE 488P HW01 Problem 2.2Document6 pagesEE 488P HW01 Problem 2.2Chai Jien Wei100% (1)
- XK3110 A Weighing Indicator MANUALDocument7 pagesXK3110 A Weighing Indicator MANUALsudirman mugi100% (1)
- Transfer Function MotorDocument14 pagesTransfer Function MotorSH WALEEDNo ratings yet
- DC Motor Control PositionDocument8 pagesDC Motor Control Positionreynaldi adeNo ratings yet
- User's Manual: D.C. Motor StudyDocument18 pagesUser's Manual: D.C. Motor Studysurendra parlaNo ratings yet
- DCS Proj1 2024Document2 pagesDCS Proj1 2024blackman510101No ratings yet
- Paper 6Document4 pagesPaper 6Aisha ShaikhNo ratings yet
- Topic 9 Control of DC MachinesDocument41 pagesTopic 9 Control of DC Machinescemefi7580No ratings yet
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocument6 pagesMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNo ratings yet
- ELG4112L505Document28 pagesELG4112L505Abika SujiNo ratings yet
- Sheet 2 Actuator SolutionDocument14 pagesSheet 2 Actuator SolutionAhmed SamirNo ratings yet
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroNo ratings yet
- Exercise 1Document1 pageExercise 1Mi HoangNo ratings yet
- Energies 10 00799 v2Document14 pagesEnergies 10 00799 v2balasubramani krishnamurthiNo ratings yet
- Lecture 5 - DC Machines Applications - Part2Document12 pagesLecture 5 - DC Machines Applications - Part2Abdo EssaNo ratings yet
- Practical: - 01: Aim: - Apparatus: - TheoryDocument3 pagesPractical: - 01: Aim: - Apparatus: - TheoryJay MonparaNo ratings yet
- M4. Velocity Control For DC Servo MotorsDocument21 pagesM4. Velocity Control For DC Servo MotorsHưng Trần ThảoNo ratings yet
- Lab1: Control/ Electronics System Design: 1/ Requirement AnalysisDocument16 pagesLab1: Control/ Electronics System Design: 1/ Requirement AnalysisJoseph NguyenNo ratings yet
- Chapter 1 Basic ConceptsDocument9 pagesChapter 1 Basic ConceptsSaruul AriunbatNo ratings yet
- Steady-State Characteristics of A DC MotorDocument4 pagesSteady-State Characteristics of A DC MotorhxmutNo ratings yet
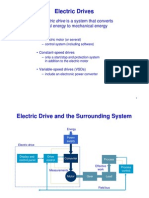
- Electric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyDocument33 pagesElectric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyNithin Mohan91% (11)
- 2.8 Electromechanical System Transfer Functions: Skill-Assessment Exercise 2.10Document6 pages2.8 Electromechanical System Transfer Functions: Skill-Assessment Exercise 2.10Eclipse ShuNo ratings yet
- DC Motor2Document19 pagesDC Motor2ahmed albaghdadiNo ratings yet
- Control System Lab ManualDocument57 pagesControl System Lab Manualokay45486No ratings yet
- Lecture 05 Electromechanical Systems Transfer FunctionsDocument13 pagesLecture 05 Electromechanical Systems Transfer FunctionsRakhmeen gulNo ratings yet
- Lab 8 DCMotor ParametersDocument11 pagesLab 8 DCMotor ParametersNikhil PatroNo ratings yet
- Lesson 10 332a PDFDocument17 pagesLesson 10 332a PDFelmer magsinoNo ratings yet
- Block Diagrams: Modeling and SimulationDocument48 pagesBlock Diagrams: Modeling and SimulationAbel CabaNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Lecture 4 - DC Machines ApplicationsDocument29 pagesLecture 4 - DC Machines ApplicationsAbdo EssaNo ratings yet
- ControlDocument5 pagesControlmuhammad shahbazNo ratings yet
- Transfer Function of A PMDC MotorDocument6 pagesTransfer Function of A PMDC MotorKenneth TanNo ratings yet
- EM Mattaria Ch1Document25 pagesEM Mattaria Ch1Osama AliNo ratings yet
- Codes: Course ContentDocument5 pagesCodes: Course ContentAhmed EhabNo ratings yet
- Speed Modeling of DC Motorcusing Tacho GeneratorDocument7 pagesSpeed Modeling of DC Motorcusing Tacho GeneratorAbanoub Malak SelemNo ratings yet
- DCMotor Parameter Identification Using Speed Step Responses PDFDocument6 pagesDCMotor Parameter Identification Using Speed Step Responses PDFGabi BrasoNo ratings yet
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocument5 pagesExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNo ratings yet
- A PI Controller Based On Gain-Scheduling 2006-1 - 2Document11 pagesA PI Controller Based On Gain-Scheduling 2006-1 - 2Khalid MounaNo ratings yet
- Design of PID CONTROLLERDocument6 pagesDesign of PID CONTROLLERRAJ KUMAR SHIHINo ratings yet
- DC MachinesDocument10 pagesDC Machinesprince ian cruzNo ratings yet
- Modelling and Simulation of Dynamic SystemsDocument28 pagesModelling and Simulation of Dynamic Systemsaman potdarNo ratings yet
- Lecture 14 Chopper Fed DC DrivesDocument6 pagesLecture 14 Chopper Fed DC DrivesNadjNo ratings yet
- Pulse-Width Modulated Rectifiers: Fundamentals of Power Electronics Chapter 18: PWM RectifiersDocument100 pagesPulse-Width Modulated Rectifiers: Fundamentals of Power Electronics Chapter 18: PWM RectifiersMohammad Faizal RamdhaniNo ratings yet
- 10784Document78 pages10784magicsarap1324No ratings yet
- Modeling of DC MotorDocument8 pagesModeling of DC MotorKaziiLaggounNo ratings yet
- Motor Modeling Based On Physical Effect Models: Dirk Dammers, Patrice Binet, Georg Pelz and Lars M. VoßkämperDocument6 pagesMotor Modeling Based On Physical Effect Models: Dirk Dammers, Patrice Binet, Georg Pelz and Lars M. VoßkämperYuki YusenkiNo ratings yet
- Where Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy ManagerDocument46 pagesWhere Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy Managerconference RequirementsNo ratings yet
- EE207 Problem Set 1 IIT ROPARDocument7 pagesEE207 Problem Set 1 IIT ROPARsumithasreekumar5No ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- AC - Motor PracDocument9 pagesAC - Motor PracK PranavNo ratings yet
- EE2092!1!2011 FundamentalsDocument84 pagesEE2092!1!2011 FundamentalsshrnbolonneNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- Presentation Sir Zahid MahmoodDocument24 pagesPresentation Sir Zahid MahmoodHeart hea7100% (2)
- Complete Sociology NotesDocument153 pagesComplete Sociology NotesHeart hea7No ratings yet
- Socialsystemofislam 190426034552Document11 pagesSocialsystemofislam 190426034552Heart hea7No ratings yet
- Participatory Welfare Services (PWS) : Rimsha Khan Roll#09 NGO ManagementDocument13 pagesParticipatory Welfare Services (PWS) : Rimsha Khan Roll#09 NGO ManagementHeart hea7No ratings yet
- Assignment Roll No 23Document6 pagesAssignment Roll No 23Heart hea7No ratings yet
- 03 201222 - Manual - Ezi-SERVO Plus-R User Program (GUI) Ver4 - ENGDocument23 pages03 201222 - Manual - Ezi-SERVO Plus-R User Program (GUI) Ver4 - ENGNguyễn Chí ThànhNo ratings yet
- 200 - EE8552, EE6503 Power Electronics - Notes 1 PDFDocument280 pages200 - EE8552, EE6503 Power Electronics - Notes 1 PDFShubhamNo ratings yet
- Lab 3: Cable ImpedanceDocument11 pagesLab 3: Cable Impedanceraheel buttNo ratings yet
- Block Diagram of Four Quadrant Chopper: Power Supply PotDocument3 pagesBlock Diagram of Four Quadrant Chopper: Power Supply PotNikhil DixitNo ratings yet
- EEE-PDC R13 Lesson PlanDocument3 pagesEEE-PDC R13 Lesson PlansuneelkluNo ratings yet
- Computer MemoryDocument19 pagesComputer MemoryUdara R Weerasinghe71% (7)
- Exams and ProjectsDocument2 pagesExams and ProjectsValerio Wiki FigheraNo ratings yet
- Packaged Gas/Electric Rooftop Units: Precedent™ 3 - 10 Tons - 60 HZDocument100 pagesPackaged Gas/Electric Rooftop Units: Precedent™ 3 - 10 Tons - 60 HZHéctor LombardiNo ratings yet
- Microwave OvenDocument13 pagesMicrowave Oven71762303124No ratings yet
- Products of Interest: Akai EIE and EIE Pro USB Audio InterfacesDocument10 pagesProducts of Interest: Akai EIE and EIE Pro USB Audio InterfacesLucas FilipeNo ratings yet
- PidDocument10 pagesPidElvis YuNo ratings yet
- SSA3000X Plus DataSheetDocument20 pagesSSA3000X Plus DataSheetdiralarkNo ratings yet
- Fault Analysis & OCRDocument8 pagesFault Analysis & OCRMuhammad Irfan ArdiansyahNo ratings yet
- Top 21 Computer Architecture Interview Questions & AnswersDocument5 pagesTop 21 Computer Architecture Interview Questions & AnswersMahadeva HerbalsNo ratings yet
- Combline Filter TunableDocument3 pagesCombline Filter TunableYung SangNo ratings yet
- Nte1855 - LA 7835Document3 pagesNte1855 - LA 7835ArjunroyEdwardNo ratings yet
- Description: LM2576 SeriesDocument8 pagesDescription: LM2576 Seriesvik_mdNo ratings yet
- Controler Danfoss RS8GY202 - AK-PC551Document26 pagesControler Danfoss RS8GY202 - AK-PC551Alexandru EnescuNo ratings yet
- Ee342 PDFDocument2 pagesEe342 PDFhiNo ratings yet
- BGA's, LGA's, QFN/DFN's - Oh My, Can Traditional DFM SurviveDocument54 pagesBGA's, LGA's, QFN/DFN's - Oh My, Can Traditional DFM SurvivemrbustaNo ratings yet
- CDSG Operated-Poppet-Type-Two-Way-ValveDocument3 pagesCDSG Operated-Poppet-Type-Two-Way-ValveDANIEL LNo ratings yet
- Testing of DC Machines - UNIT IIIDocument34 pagesTesting of DC Machines - UNIT IIIKUMAR SNo ratings yet
- FunnelcodeDocument5 pagesFunnelcodeapi-397709136No ratings yet
- Id - HD - Speed - Censor - Re 95 134Document4 pagesId - HD - Speed - Censor - Re 95 134Bayanaka TehnikNo ratings yet
- Assig 1Document4 pagesAssig 1Charandeep TirkeyNo ratings yet
- Rtl8188Ce: 802.11B/G/N Rtl8188Ce Minicard User'S ManualDocument12 pagesRtl8188Ce: 802.11B/G/N Rtl8188Ce Minicard User'S Manualami oreverNo ratings yet
- PMDC Motor Modeling and Parameter Identification For Control PurposeDocument6 pagesPMDC Motor Modeling and Parameter Identification For Control PurposeBrasoveanu GheorghitaNo ratings yet
- Bluetooth Tutorial: Center For Wireless TelecommunicationsDocument46 pagesBluetooth Tutorial: Center For Wireless TelecommunicationsVêdhã RockNo ratings yet
- Abhishek Dumka 16bee1083 PowerDocument14 pagesAbhishek Dumka 16bee1083 PowerAbhishek DumkaNo ratings yet