01 Ros2 Cli
01 Ros2 Cli
Download as docx, pdf, or txt
You might also like
- 12 Dimensions Of-Mastery The Lifebook Quest by Jon Butcher Action Guide-2Document34 pages12 Dimensions Of-Mastery The Lifebook Quest by Jon Butcher Action Guide-2Nsjs100% (12)
- Vs 2400 CDDocument49 pagesVs 2400 CDtatfutureNo ratings yet
- Snapshot Transportation Company IncDocument7 pagesSnapshot Transportation Company Incouma alphonceNo ratings yet
- AlsaDocument19 pagesAlsaDiego ZavalaNo ratings yet
- The Willpower Instinct by Kelly McGonigalDocument5 pagesThe Willpower Instinct by Kelly McGonigalArjun MeghanathanNo ratings yet
- 05 ROS2 LaunchDocument34 pages05 ROS2 LaunchArjun MeghanathanNo ratings yet
- Understanding Nodes - ROS 2 Documentation - Humble DocumentationDocument6 pagesUnderstanding Nodes - ROS 2 Documentation - Humble DocumentationachainyaNo ratings yet
- 03 ROS Client LibrariesDocument58 pages03 ROS Client LibrariesArjun MeghanathanNo ratings yet
- ROS-Lab TutorialDocument7 pagesROS-Lab TutorialKostas FilippaiosNo ratings yet
- 04 ROS ActionsDocument20 pages04 ROS ActionsArjun MeghanathanNo ratings yet
- Lecturer: Roi Yehoshua: Catkin Build System ROS Packages Building ROS NodesDocument41 pagesLecturer: Roi Yehoshua: Catkin Build System ROS Packages Building ROS NodesSergio David Sierra Marin100% (1)
- Appendix F Three Key Features of ROS2Document52 pagesAppendix F Three Key Features of ROS2aDun iDeiNo ratings yet
- Gazebo Ros ControlDocument1 pageGazebo Ros Controlrorro_mrNo ratings yet
- ROS2 Basics 1Document2 pagesROS2 Basics 1Nirban DasNo ratings yet
- Rbn-Ros2 2022Document22 pagesRbn-Ros2 2022abuNo ratings yet
- Realtime ROS2Document53 pagesRealtime ROS2schwarmcycNo ratings yet
- CMake Basic Guide (As Included)Document336 pagesCMake Basic Guide (As Included)RifhadmNo ratings yet
- Introduction To ROS, CAMBADA@Home Use Case: Eurico PedrosaDocument20 pagesIntroduction To ROS, CAMBADA@Home Use Case: Eurico PedrosaefpmoNo ratings yet
- Lab 1 ROS Intro LAB 02 PDFDocument33 pagesLab 1 ROS Intro LAB 02 PDFNadeya Nusrat AnannaNo ratings yet
- CMake Tutorial 8feb2012Document148 pagesCMake Tutorial 8feb2012kaosadNo ratings yet
- ROS2 IntroductionDocument18 pagesROS2 IntroductionIbrahimEssamNo ratings yet
- Notes RosDocument51 pagesNotes RosBusayo OjumuNo ratings yet
- ROS Commands: Textbook P. 90 127Document14 pagesROS Commands: Textbook P. 90 127shreyashNo ratings yet
- ROS Gazebo Quadrotor Simulator PDFDocument38 pagesROS Gazebo Quadrotor Simulator PDFadelNo ratings yet
- Ros Tutorial SlidesDocument24 pagesRos Tutorial SlidessaffanhamNo ratings yet
- Response-Time Analysis of ROS2Document23 pagesResponse-Time Analysis of ROS2SvastitsNo ratings yet
- ROS2 Basics in 5 DaysDocument9 pagesROS2 Basics in 5 DaysJosep Rueda CollellNo ratings yet
- Communication ProtocolsDocument123 pagesCommunication ProtocolsL S Narasimharao PothanaNo ratings yet
- AN Simple OOP in CDocument15 pagesAN Simple OOP in CTrọngBằngNguyễnNo ratings yet
- Practical C++17 - Jason Turner - CppCon 2017Document116 pagesPractical C++17 - Jason Turner - CppCon 2017GNo ratings yet
- Beginning Game Programming with Pygame Zero: Coding Interactive Games on Raspberry Pi Using PythonFrom EverandBeginning Game Programming with Pygame Zero: Coding Interactive Games on Raspberry Pi Using PythonNo ratings yet
- Writing Device Drivers in Linux: A Brief TutorialDocument21 pagesWriting Device Drivers in Linux: A Brief TutorialDaniel Neis Araújo100% (10)
- NRF Sniffer UG v2.2 PDFDocument21 pagesNRF Sniffer UG v2.2 PDFClown OptyfenNo ratings yet
- BitBake User ManualDocument68 pagesBitBake User ManualSajjad AhmedNo ratings yet
- Cmake Cheatsheet - A Gentle Introduction To CmakeDocument5 pagesCmake Cheatsheet - A Gentle Introduction To Cmakepkissfa100% (1)
- Finite State MachineDocument20 pagesFinite State MachineClyde CauchiNo ratings yet
- Learning CmakeDocument45 pagesLearning Cmakexieyubo100% (6)
- RTOSDocument34 pagesRTOSMayank SinghNo ratings yet
- Welcome To ROS TopicsDocument2 pagesWelcome To ROS TopicsVan Tung HaNo ratings yet
- ROS Robot Operating SystemDocument23 pagesROS Robot Operating SystemakozyNo ratings yet
- Building Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)From EverandBuilding Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)No ratings yet
- Hector SLAM USAR Kohlbrecher RRSS Graz 2012Document39 pagesHector SLAM USAR Kohlbrecher RRSS Graz 2012Ћирка ФејзбуџаркаNo ratings yet
- AOSP On New DeivceDocument54 pagesAOSP On New DeivceisumanthgNo ratings yet
- SLAM Techniques and AlgorithmsDocument73 pagesSLAM Techniques and Algorithmsnicholas777No ratings yet
- Rust In Practice: A Programmers Guide to Build Rust Programs, Test Applications and Create Cargo PackagesFrom EverandRust In Practice: A Programmers Guide to Build Rust Programs, Test Applications and Create Cargo PackagesNo ratings yet
- How To Build Android ROM From SourceDocument36 pagesHow To Build Android ROM From Sourcehungbkpro90No ratings yet
- Pioneer RobotDocument69 pagesPioneer RobotSummer TriangleNo ratings yet
- Eclipse - Platform Plug-In Developer GuideDocument150 pagesEclipse - Platform Plug-In Developer GuideToll'n GaurhothNo ratings yet
- Rhapsody Handout Statecharts Sequence Diagrams v1r1Document8 pagesRhapsody Handout Statecharts Sequence Diagrams v1r1Richard LiaoNo ratings yet
- Basic Operating Tutorial of Robot Operating SystemDocument40 pagesBasic Operating Tutorial of Robot Operating SystemJose De Jesus MoyaNo ratings yet
- Ros Lab 3Document27 pagesRos Lab 3Souad BouzianeNo ratings yet
- HAL Interface Definition Language or HIDLDocument9 pagesHAL Interface Definition Language or HIDLSanjay Patel100% (1)
- Ikigai - The Japanese Secret To A Long and Happy Life by Héctor García - Francesc MirallesDocument3 pagesIkigai - The Japanese Secret To A Long and Happy Life by Héctor García - Francesc MirallesArjun Meghanathan100% (1)
- Eight Pillars of Prosperity by James AllenDocument8 pagesEight Pillars of Prosperity by James AllenArjun Meghanathan0% (1)
- Your Imagination Is Your IdentityDocument5 pagesYour Imagination Is Your IdentityArjun Meghanathan100% (1)
- How To Win Part 3Document2 pagesHow To Win Part 3Arjun MeghanathanNo ratings yet
- Lecture - 23 Performance Appraisal - IIDocument9 pagesLecture - 23 Performance Appraisal - IIArjun MeghanathanNo ratings yet
- Data Sheet: Data-A: Qty Description Rate Per AmountDocument2 pagesData Sheet: Data-A: Qty Description Rate Per AmountArjun MeghanathanNo ratings yet
- PWD JeDocument11 pagesPWD JeArjun MeghanathanNo ratings yet
- SL Qty Description of Work Rate Per Amoun T 1. 10 Pts 7638.0 0Document4 pagesSL Qty Description of Work Rate Per Amoun T 1. 10 Pts 7638.0 0Arjun MeghanathanNo ratings yet
- Lecture - 25 Training and Development - IIDocument10 pagesLecture - 25 Training and Development - IIArjun MeghanathanNo ratings yet
- Selection - IIDocument11 pagesSelection - IIArjun MeghanathanNo ratings yet
- Lecture - 17 Evaluation, Feedback and RewardsDocument7 pagesLecture - 17 Evaluation, Feedback and RewardsArjun MeghanathanNo ratings yet
- Lecture - 22 Performance Appraisal - IDocument11 pagesLecture - 22 Performance Appraisal - IArjun MeghanathanNo ratings yet
- Lecture No - 35 Leadership (Continuation)Document9 pagesLecture No - 35 Leadership (Continuation)Arjun MeghanathanNo ratings yet
- Lecture - 30 Communication (Contd.)Document9 pagesLecture - 30 Communication (Contd.)Arjun MeghanathanNo ratings yet
- Lecture - 29 CommunicationDocument17 pagesLecture - 29 CommunicationArjun MeghanathanNo ratings yet
- Effectiveness of Flexible Learning On The Academic Performance of StudentsDocument6 pagesEffectiveness of Flexible Learning On The Academic Performance of StudentsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Model Railway Signal ProjectDocument1 pageModel Railway Signal Projectvinaykumarverma21No ratings yet
- Cartooning Session Guide FinalDocument3 pagesCartooning Session Guide FinalBemBem0% (1)
- Technology Multiple Choice 3Document10 pagesTechnology Multiple Choice 3Alex KullehNo ratings yet
- Product and Company Identification: Safety Data SheetDocument6 pagesProduct and Company Identification: Safety Data Sheetrafael_figueroa100% (1)
- DS 300 H 100 160kVA Manual Industrial Three Phase UPS TescomDocument54 pagesDS 300 H 100 160kVA Manual Industrial Three Phase UPS TescomSaad ElhemediNo ratings yet
- HSSREC Application TemplateDocument8 pagesHSSREC Application TemplateNompumelelo NgcoboNo ratings yet
- The Language of Psychology: APA Style As EpistemologyDocument9 pagesThe Language of Psychology: APA Style As EpistemologyMafalda Lourenço SantosNo ratings yet
- Apcd TD 395 Revb hvsl1200 en MonDocument11 pagesApcd TD 395 Revb hvsl1200 en MonJonas DanielNo ratings yet
- A New Type of Large Scale Thermal Energy StorageDocument9 pagesA New Type of Large Scale Thermal Energy StorageNguyễn Minh TuấnNo ratings yet
- LPE1 EappDocument7 pagesLPE1 EappAriel AlonsagayNo ratings yet
- HiPer HR Owners ManualDocument85 pagesHiPer HR Owners ManualHAFIZATUL IzanNo ratings yet
- Descriptive Essay SocializationDocument2 pagesDescriptive Essay SocializationMARY AMILEE DE GUZMANNo ratings yet
- Pump Pipe Line Size CalculationDocument3 pagesPump Pipe Line Size CalculationbharathNo ratings yet
- S13 Divide and Conquer Adaptive Components-Tim Waldock - HandoutDocument70 pagesS13 Divide and Conquer Adaptive Components-Tim Waldock - Handoutsandocan174bNo ratings yet
- High Voletage Lithium Batteries - LNMODocument2 pagesHigh Voletage Lithium Batteries - LNMOajunkie17No ratings yet
- Digitron EFLDocument60 pagesDigitron EFLCaseyNo ratings yet
- IDS EssayDocument3 pagesIDS EssayC “C Sizzle” SizzleNo ratings yet
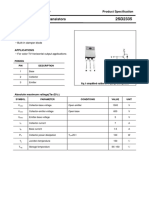
- 2SD 2335 - IscDocument3 pages2SD 2335 - IscStevenNo ratings yet
- Screenshot 2024-08-21 at 8.31.21 AMDocument43 pagesScreenshot 2024-08-21 at 8.31.21 AMshamalivijayanthiNo ratings yet
- MANY0703A.gb - Technical Manual Metacentre CX BoxDocument62 pagesMANY0703A.gb - Technical Manual Metacentre CX Boxmiguel angel vanegas medinaNo ratings yet
- Business Project Chapter 1-3Document47 pagesBusiness Project Chapter 1-3zeearaNo ratings yet
- Sk85cs-7 (Na 2019) Shop ManualDocument1,770 pagesSk85cs-7 (Na 2019) Shop Manualsonhacker97100% (3)
- Location of Components: SMCS - 4300 5050Document43 pagesLocation of Components: SMCS - 4300 5050Francisco ValienteNo ratings yet
- Measuring Capillary Pressure RelationshipsDocument3 pagesMeasuring Capillary Pressure RelationshipsAnant RamdialNo ratings yet
- Olp4181 - TW-1-24 Fa LRDocument24 pagesOlp4181 - TW-1-24 Fa LRMelita ArifiNo ratings yet
- BRSA Group Training Brochure 4 Panel Small LRDocument8 pagesBRSA Group Training Brochure 4 Panel Small LRbrNo ratings yet