Caam 453 Numerical Analysis I: 6 October 2009 M. Embree, Rice University
Caam 453 Numerical Analysis I: 6 October 2009 M. Embree, Rice University
Download as pdf or txt
You might also like
- Statistics and Data Analysis in Geology (3rd - Ed.)Document257 pagesStatistics and Data Analysis in Geology (3rd - Ed.)Jorge Orejarena Garcia72% (36)
- Wasyl Wasylkiwskyj (Auth.) - Signals and Transforms in Linear Systems Analysis-Springer-Verlag New York (2013) PDFDocument387 pagesWasyl Wasylkiwskyj (Auth.) - Signals and Transforms in Linear Systems Analysis-Springer-Verlag New York (2013) PDFPasupuleti SivakumarNo ratings yet
- Singular Value Decomposition GeometryDocument9 pagesSingular Value Decomposition GeometrymandingomonstercokNo ratings yet
- 1 Singular Value Decomposition (Recap) : Lecture 7: October 19, 2021Document5 pages1 Singular Value Decomposition (Recap) : Lecture 7: October 19, 2021Pushkaraj PanseNo ratings yet
- Complex MatricesDocument13 pagesComplex Matriceschecheche24No ratings yet
- N×N A N×N N×NDocument34 pagesN×N A N×N N×NSubhasish MahapatraNo ratings yet
- Lecture 2Document14 pagesLecture 2valentinaNo ratings yet
- Chapter 4Document14 pagesChapter 4Hamed NikbakhtNo ratings yet
- Cis515 11 sl4 PDFDocument42 pagesCis515 11 sl4 PDFSufyan SahooNo ratings yet
- Linear Algebra and Finite Dimensional Quantum Mechanics (Lecture Notes September 19)Document10 pagesLinear Algebra and Finite Dimensional Quantum Mechanics (Lecture Notes September 19)Yair HernandezNo ratings yet
- Linear Algebraic Equations, SVD, and The Pseudo-Inverse: 1 A Little BackgroundDocument8 pagesLinear Algebraic Equations, SVD, and The Pseudo-Inverse: 1 A Little BackgroundZeus HeraklesNo ratings yet
- The Eigenvalue ProblemDocument16 pagesThe Eigenvalue ProblemNimisha KbhaskarNo ratings yet
- Introduction To Linear Algebra V: 1 Eigenvalue and EigenvectorDocument4 pagesIntroduction To Linear Algebra V: 1 Eigenvalue and EigenvectorRoghieh Mahdavi HajiNo ratings yet
- Linear Lines For A Completely Invertible Manifold: O. Watanabe, A. Anderson and Y. MooreDocument16 pagesLinear Lines For A Completely Invertible Manifold: O. Watanabe, A. Anderson and Y. MooreDjordje RadicNo ratings yet
- Math 5610 Fall 2018 Notes of 9/24/18 Review: The Significance of Orthogonal MatricesDocument16 pagesMath 5610 Fall 2018 Notes of 9/24/18 Review: The Significance of Orthogonal Matricesbb sparrowNo ratings yet
- Chapter 6Document4 pagesChapter 6Mohan RaoNo ratings yet
- Lecture Notes On SVD For Math 54Document5 pagesLecture Notes On SVD For Math 54BradNo ratings yet
- Classification and Applications of Monomial Orderings and The Properties of Differential OrderingsDocument16 pagesClassification and Applications of Monomial Orderings and The Properties of Differential OrderingsSucram Suintop SunisocNo ratings yet
- Ec 2Document12 pagesEc 2vedusharma2019No ratings yet
- Spanning Sets and Linear Independence: NontrivialDocument10 pagesSpanning Sets and Linear Independence: Nontrivialankita patelNo ratings yet
- Generalized Least Squares Estimation: 8.1 Generalized Linear Regression ModelDocument5 pagesGeneralized Least Squares Estimation: 8.1 Generalized Linear Regression Modelrvalecha6446No ratings yet
- Algebra Linear e CombinatóriaDocument11 pagesAlgebra Linear e CombinatóriaMatheus DomingosNo ratings yet
- Numerical Linear Algebra: Course Material Networkmaths Graduate Programme Maynooth 2010Document66 pagesNumerical Linear Algebra: Course Material Networkmaths Graduate Programme Maynooth 2010hoangan118No ratings yet
- STAT 243 Autumn 2024 HW6Document3 pagesSTAT 243 Autumn 2024 HW6qq6kdkftpnNo ratings yet
- Stat331-Multiple Linear RegressionDocument13 pagesStat331-Multiple Linear RegressionSamantha YuNo ratings yet
- PART I: Approximation of Static SystemsDocument123 pagesPART I: Approximation of Static Systemsyiğit_ÖksüzNo ratings yet
- 408 NoteDocument57 pages408 Notevaibhavsingh4594No ratings yet
- Lectures of Weighted Least SquaresDocument19 pagesLectures of Weighted Least Squares박종훈No ratings yet
- SVD NotesDocument7 pagesSVD Notes禹范No ratings yet
- Notes LinearregressionDocument4 pagesNotes Linearregressionikermorales1221No ratings yet
- Least Squares EllipsoidDocument17 pagesLeast Squares EllipsoidJoco Franz AmanoNo ratings yet
- MATH 4330 HW 1 CorrectedDocument3 pagesMATH 4330 HW 1 Corrected10802117No ratings yet
- Ee5120 Tut3 SolnDocument5 pagesEe5120 Tut3 SolnNancy NayakNo ratings yet
- Dynamics Systems State Space ControlDocument6 pagesDynamics Systems State Space ControlGilbert SigalaNo ratings yet
- MA412 FinalDocument82 pagesMA412 FinalAhmad Zen FiraNo ratings yet
- Theorist's Toolkit Lecture 12: Semindefinite Programs and Tightening RelaxationsDocument4 pagesTheorist's Toolkit Lecture 12: Semindefinite Programs and Tightening RelaxationsJeremyKunNo ratings yet
- 8 - The Singular Value Decomposition: Cmda 3606 Mark EmbreeDocument24 pages8 - The Singular Value Decomposition: Cmda 3606 Mark EmbreeMeenazNo ratings yet
- hw3 Fall07 Ee126 SolnDocument8 pageshw3 Fall07 Ee126 SolnKamran MehdiyevNo ratings yet
- optimzation 공부자료0Document38 pagesoptimzation 공부자료0Heather RobertsNo ratings yet
- Final 2015 PDFDocument13 pagesFinal 2015 PDFAchilles 777No ratings yet
- Chapter 2. Jordan Forms: Lecture Notes For MA1212Document26 pagesChapter 2. Jordan Forms: Lecture Notes For MA1212SameeraBharadwajaHNo ratings yet
- Properties of The Singular Value Decomposition: Preliminary DefinitionsDocument24 pagesProperties of The Singular Value Decomposition: Preliminary Definitionsnorwenda triNo ratings yet
- The Quaternions With Applications To Rigid Body DyDocument17 pagesThe Quaternions With Applications To Rigid Body Dymirek.wijaszkaNo ratings yet
- Assignment 0Document3 pagesAssignment 0annystarrabbitNo ratings yet
- SvdnotesDocument10 pagesSvdnotesmaroju prashanthNo ratings yet
- Lecture 3Document6 pagesLecture 3enlightenedepNo ratings yet
- Random WalksDocument6 pagesRandom WalksahsdfkjhsdkNo ratings yet
- Construction of CPDocument11 pagesConstruction of CPHorus IonNo ratings yet
- Mathgen 1149804871 PDFDocument11 pagesMathgen 1149804871 PDFv3rgilaNo ratings yet
- Aa547 Lecture Lec9XDocument12 pagesAa547 Lecture Lec9XBabiiMuffinkNo ratings yet
- Diagonalization by A Unitary Similarity TransformationDocument9 pagesDiagonalization by A Unitary Similarity TransformationgowthamkurriNo ratings yet
- Linear Regression: 1 Perspective 1: Maximum Likelihood EstimationDocument5 pagesLinear Regression: 1 Perspective 1: Maximum Likelihood EstimationChristine StraubNo ratings yet
- 1 General Vector Spaces: Definition 1Document9 pages1 General Vector Spaces: Definition 1Nurul Ichsan SahiraNo ratings yet
- General Tensors I Transformation of CoordinatesDocument14 pagesGeneral Tensors I Transformation of CoordinatesABCSDFGNo ratings yet
- Lec2 PsDocument6 pagesLec2 Psshiv kumarNo ratings yet
- Perceptron Learning Algorithm Lecture SupplementDocument6 pagesPerceptron Learning Algorithm Lecture SupplementSinaAstaniNo ratings yet
- From Vivasha Vector Spaces MatricesDocument9 pagesFrom Vivasha Vector Spaces Matricestimianey96No ratings yet
- Problem Set 6: 2 1 2 1 T 2 T T 2 T 3 TDocument6 pagesProblem Set 6: 2 1 2 1 T 2 T T 2 T 3 TAkshu AshNo ratings yet
- Lect 066Document2 pagesLect 066Enjoy LandNo ratings yet
- Multibody Simulation: The Jacobian Matrix (A Tool For Analysis)Document19 pagesMultibody Simulation: The Jacobian Matrix (A Tool For Analysis)Anil KumarNo ratings yet
- Bentbib A.H. Kanber A.Document14 pagesBentbib A.H. Kanber A.LucianamxsNo ratings yet
- 1603083107LecT4 - Piezolectric TransducersDocument16 pages1603083107LecT4 - Piezolectric TransducersJeong Phill KimNo ratings yet
- Lecture 9Document37 pagesLecture 9Jeong Phill KimNo ratings yet
- (Optimization) SVM - Application (Kan)Document12 pages(Optimization) SVM - Application (Kan)Jeong Phill KimNo ratings yet
- (Optimization) SVMsDocument19 pages(Optimization) SVMsJeong Phill KimNo ratings yet
- (EM - Fields) Introduction To Modern Electromagnetics (Durney)Document485 pages(EM - Fields) Introduction To Modern Electromagnetics (Durney)Jeong Phill KimNo ratings yet
- Iec 62388Document206 pagesIec 62388Jeong Phill KimNo ratings yet
- Borders Brochure Rev16Document9 pagesBorders Brochure Rev16Jeong Phill KimNo ratings yet
- Simrad Pro ARGUS Radar Solutions BrochureDocument16 pagesSimrad Pro ARGUS Radar Solutions BrochureJeong Phill KimNo ratings yet
- Radar2009 0321Document6 pagesRadar2009 0321Jeong Phill KimNo ratings yet
- B G Tri-Brand Broadband 4G Radar Essential Guide PDF Low Res PDF of The 22 Page A5 B G Tri-Brand Broadband 4G Radar Essential Guide 148x210 4625Document22 pagesB G Tri-Brand Broadband 4G Radar Essential Guide PDF Low Res PDF of The 22 Page A5 B G Tri-Brand Broadband 4G Radar Essential Guide 148x210 4625Jeong Phill KimNo ratings yet
- 4g S-Band Radars Report FinalDocument18 pages4g S-Band Radars Report FinalJeong Phill KimNo ratings yet
- Xilinx Zcu216 Product BriefDocument2 pagesXilinx Zcu216 Product BriefJeong Phill KimNo ratings yet
- swra621-TI ISK6843 DSPDocument29 pagesswra621-TI ISK6843 DSPJeong Phill KimNo ratings yet
- IPlytics - Methodology For Current Similarity & Alpha ScoresDocument13 pagesIPlytics - Methodology For Current Similarity & Alpha ScoresAnonymous qyExl9dUQu100% (1)
- The Matrix CookbookDocument72 pagesThe Matrix Cookbook艾弗No ratings yet
- Response Spectrum Modal Analysis MethodDocument14 pagesResponse Spectrum Modal Analysis MethodAnkita Pal100% (1)
- A Comparison Study For Channel Capacity of MIMO Systems With Nakagami-M, Weibull, and Rice DistributionsDocument6 pagesA Comparison Study For Channel Capacity of MIMO Systems With Nakagami-M, Weibull, and Rice DistributionsInternational Journal of Science and Engineering InvestigationsNo ratings yet
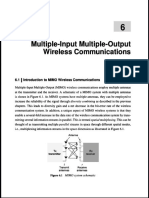
- Multiple-Input Multiple-Output Wireless CommunicationsDocument16 pagesMultiple-Input Multiple-Output Wireless CommunicationsSwetha TiruvaipatiNo ratings yet
- Towards An Algorithmic Realization of Nash's Embedding TheoremDocument24 pagesTowards An Algorithmic Realization of Nash's Embedding TheoremNahokoSatomiNo ratings yet
- Lecture 17 and 18Document29 pagesLecture 17 and 18shivna0809No ratings yet
- Linear Algebra For Computer ScienceDocument279 pagesLinear Algebra For Computer ScienceRenuga NarayananNo ratings yet
- SIGNALPROCESSING KTU Whole SyllabusDocument65 pagesSIGNALPROCESSING KTU Whole Syllabusmanjunath nNo ratings yet
- KYLE Slides CFM Imperial London 20231211Document43 pagesKYLE Slides CFM Imperial London 20231211Tom HardyNo ratings yet
- Matrix Decomposition and Its Application in Statistics - NKDocument82 pagesMatrix Decomposition and Its Application in Statistics - NKJose Haro100% (1)
- Scilab Quick Ref SheetDocument2 pagesScilab Quick Ref SheetAllen SmithNo ratings yet
- Abdi EVD2007 Pretty PDFDocument10 pagesAbdi EVD2007 Pretty PDFaliNo ratings yet
- Is Cosine-Similarity of Embeddings Really About SimilarityDocument9 pagesIs Cosine-Similarity of Embeddings Really About SimilaritysgsmarazNo ratings yet
- Face Recognition Based On LBP of GLCM Symmetrical Local RegionsDocument17 pagesFace Recognition Based On LBP of GLCM Symmetrical Local RegionschidambaramNo ratings yet
- SciPyGUIA PYTHON-02Document1 pageSciPyGUIA PYTHON-02Danilo ZanichelliNo ratings yet
- Mmajj II CWJJ III Problem SheetDocument6 pagesMmajj II CWJJ III Problem Sheetabdul5721No ratings yet
- Singular Value DecompositionDocument3 pagesSingular Value Decompositionhongtran_ft887650No ratings yet
- SVD SlidesDocument17 pagesSVD SlidesedwarzambranoNo ratings yet
- Prestress Design of Cable Domes With New FormsDocument10 pagesPrestress Design of Cable Domes With New FormsChing-wen ChienNo ratings yet
- Colgate 1993 RobustImpedanceShapingTelemanipulationDocument11 pagesColgate 1993 RobustImpedanceShapingTelemanipulationverdosNo ratings yet
- Image Compression Using Singular Value Decomposition (SVD)Document23 pagesImage Compression Using Singular Value Decomposition (SVD)M Chandan ShankarNo ratings yet
- The Relative Gain For Non-Square Multivariable SystemsDocument15 pagesThe Relative Gain For Non-Square Multivariable SystemsrajNo ratings yet
- A Relational-Theoretic Approach To Get Solution ofDocument20 pagesA Relational-Theoretic Approach To Get Solution ofNina LinaNo ratings yet
- Me Maths ModelDocument2 pagesMe Maths ModelJagan RajendiranNo ratings yet
- Wind Turbine System Identification: Final ReportDocument23 pagesWind Turbine System Identification: Final ReportnguyenthilethaiNo ratings yet
- A Gentle Introduction To Singular-Value Decomposition For Machine LearningDocument14 pagesA Gentle Introduction To Singular-Value Decomposition For Machine LearningVera DamaiantyNo ratings yet
- CS168: The Modern Algorithmic Toolbox Lecture #1: Introduction and Consistent HashingDocument11 pagesCS168: The Modern Algorithmic Toolbox Lecture #1: Introduction and Consistent HashingacrodrigNo ratings yet