Microstep Driver Manual: Version 6/13/2006
Microstep Driver Manual: Version 6/13/2006
Download as pdf or txt
You might also like
- Abb Manuale BSDS - Draft01-1Document567 pagesAbb Manuale BSDS - Draft01-1Roonar Aponte NoaNo ratings yet
- Manual Del Variador de Frecuencia Baldor VS1MD21Document164 pagesManual Del Variador de Frecuencia Baldor VS1MD21Luis Orduña100% (1)
- Motor-Catalog English 2013 PDFDocument80 pagesMotor-Catalog English 2013 PDFILham Dwi PutraNo ratings yet
- Riello Burners 509SEDocument12 pagesRiello Burners 509SEchnandu100% (1)
- Expanding The Synopsys Primetime Solution With Power AnalysisDocument7 pagesExpanding The Synopsys Primetime Solution With Power AnalysisAparna TiwariNo ratings yet
- SMC4-4-16A16B Four-Axis Motion Controller Instruction ManualDocument14 pagesSMC4-4-16A16B Four-Axis Motion Controller Instruction Manualluca100% (1)
- DHC19S S PDFDocument2 pagesDHC19S S PDFCsaba VargaNo ratings yet
- User Manual: Yf-Dz Computer Controlled Bag Making MachineDocument9 pagesUser Manual: Yf-Dz Computer Controlled Bag Making MachineabdiNo ratings yet
- Autoradio Panasonic CQ c1405n Na EngleskomDocument30 pagesAutoradio Panasonic CQ c1405n Na Engleskomgoxy1970No ratings yet
- TtaDocument2 pagesTtaJorge Andres UrraNo ratings yet
- MT6050i MT8050i: Installation InstructionDocument2 pagesMT6050i MT8050i: Installation InstructionСања БанковићNo ratings yet
- Batidora HL600Document20 pagesBatidora HL600Dinosaurio1990No ratings yet
- CNCmakers-EP100 B QuickGuide-EN - EP100Document14 pagesCNCmakers-EP100 B QuickGuide-EN - EP100Angelica PeñarandaNo ratings yet
- GVX2000 - Tecnica Industriale S.R.L.Document39 pagesGVX2000 - Tecnica Industriale S.R.L.Gabriel CotignolaNo ratings yet
- Modbus Communication: FX3U 485ADP MB 485ADP MBDocument17 pagesModbus Communication: FX3U 485ADP MB 485ADP MBkashinathNo ratings yet
- Sensors: SA6A: Ultrasonic Analog Distance Detection SensorsDocument5 pagesSensors: SA6A: Ultrasonic Analog Distance Detection SensorsRamadhan Adi NugrohoNo ratings yet
- Delta - Ia Hmi - Dop B10S411 S511 E515 - Q - TC en SC Tur - 20160714 PDFDocument8 pagesDelta - Ia Hmi - Dop B10S411 S511 E515 - Q - TC en SC Tur - 20160714 PDFMohsin JunejaNo ratings yet
- BLP 75 E ManualDocument21 pagesBLP 75 E ManualreinaldoNo ratings yet
- Vat-3fd Instruction ManualDocument32 pagesVat-3fd Instruction ManualkeeperselmainNo ratings yet
- Owner's Manual (KJR 08)Document4 pagesOwner's Manual (KJR 08)Catalino Peralta Segovia100% (1)
- QZ 5 BJDocument28 pagesQZ 5 BJJoseNo ratings yet
- EVS93xx - 9300 Position Controller System ManualDocument445 pagesEVS93xx - 9300 Position Controller System ManualArsalan MalikNo ratings yet
- POwered Pallet Trucks - Manuals - AtlasCopco - FBW - FBW2440RevADocument16 pagesPOwered Pallet Trucks - Manuals - AtlasCopco - FBW - FBW2440RevAEduardo.s. EurolevaNo ratings yet
- N428E02 2-Channel RS485 Relay ManualDocument7 pagesN428E02 2-Channel RS485 Relay ManualMirosław WalasikNo ratings yet
- Servo ControllerDocument7 pagesServo ControllerWALEED USMANINo ratings yet
- Instruction Manual For Screw Compressor Unit Controller Mypro Touch Type-SDocument207 pagesInstruction Manual For Screw Compressor Unit Controller Mypro Touch Type-SVicente Vixo Montero BustosNo ratings yet
- 步进电机驱动器系列Document2 pages步进电机驱动器系列et_fitoNo ratings yet
- LX3V-2PTS-BD User Manual PDFDocument9 pagesLX3V-2PTS-BD User Manual PDFStan TCNo ratings yet
- FBs Special Relay Register List ENDocument19 pagesFBs Special Relay Register List ENAmmar Al-KindyNo ratings yet
- Epc402 KK TRDocument2 pagesEpc402 KK TRSamar AliNo ratings yet
- WEG Guia de Instalacion Mt6070ip Mt8070ipDocument2 pagesWEG Guia de Instalacion Mt6070ip Mt8070ipadalaviNo ratings yet
- 820B enDocument12 pages820B enSaif Ali100% (1)
- Altivar Easy 310 - ATV310HU22N4ADocument3 pagesAltivar Easy 310 - ATV310HU22N4AGuillermo HernándezNo ratings yet
- MDLU3 AlarmsDocument58 pagesMDLU3 Alarmssenis100% (1)
- Encoder S Short FormDocument2 pagesEncoder S Short FormelecompinnNo ratings yet
- MTC Operation ManualDocument32 pagesMTC Operation ManualXcd SteflerNo ratings yet
- Tension Controller Mitsubishi LE-40MTADocument9 pagesTension Controller Mitsubishi LE-40MTATjhandNo ratings yet
- GS Battery Technical Data Sheet N200Document1 pageGS Battery Technical Data Sheet N200satang M.F.LNo ratings yet
- Shimaden Digital Controller Shimaden Digital Controller: SR1 / SR3 SR1 / SR3 / SR4Document2 pagesShimaden Digital Controller Shimaden Digital Controller: SR1 / SR3 SR1 / SR3 / SR4Paul AlvarezNo ratings yet
- Service Manual: New DSP Hc40Document30 pagesService Manual: New DSP Hc40SVC ADM100% (1)
- Delta DPA CatalogDocument7 pagesDelta DPA CatalogElectromateNo ratings yet
- UT-2506 User ManualDocument22 pagesUT-2506 User ManualBayanaka TehnikNo ratings yet
- Bs 205 0512eDocument49 pagesBs 205 0512eVũ Trọng QuyếtNo ratings yet
- Function Bloc: Function Bloc Modbus RTU Master Serial Port HostlinkDocument2 pagesFunction Bloc: Function Bloc Modbus RTU Master Serial Port Hostlinkjunior cezarNo ratings yet
- XGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFDocument1,322 pagesXGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFJaka SimonicNo ratings yet
- Master-K: User User User User''''s Manual S Manual S Manual S ManualDocument230 pagesMaster-K: User User User User''''s Manual S Manual S Manual S Manualwilfredo falconNo ratings yet
- RE50214 Nivometer PDFDocument16 pagesRE50214 Nivometer PDFCaspar Heerkens100% (1)
- Akira TVDocument22 pagesAkira TVErmand WindNo ratings yet
- AP InverterDocument100 pagesAP InvertermichaelsetiawnNo ratings yet
- Delta Ia-Asd Asda-A2-e Um en 20210205Document135 pagesDelta Ia-Asd Asda-A2-e Um en 20210205321rubenNo ratings yet
- GSE-Series CalibracionDocument1 pageGSE-Series CalibracionLuis HuertaNo ratings yet
- DaWin Pro ManualDocument53 pagesDaWin Pro ManualBrunoNo ratings yet
- Analogue Module AK 4014 en Description U - Erhardt+LeimerDocument6 pagesAnalogue Module AK 4014 en Description U - Erhardt+LeimerDs KuzmenkoNo ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Manual3Axis 10A PDFDocument12 pagesManual3Axis 10A PDFLitus FendetestasNo ratings yet
- G 201 ManualDocument6 pagesG 201 ManualTanvon MalikNo ratings yet
- Sabertooth 2 X 10Document19 pagesSabertooth 2 X 10César HernándezNo ratings yet
- Pololu - A4988 Stepper Motor Driver CarrierDocument7 pagesPololu - A4988 Stepper Motor Driver CarrierJuan Alberto Casares ZaragozaNo ratings yet
- A4988 Stepper Motor Driver Carrier, Black EditionDocument5 pagesA4988 Stepper Motor Driver Carrier, Black EditionRadersNo ratings yet
- Datasheet 1182 PDFDocument6 pagesDatasheet 1182 PDFabs0001No ratings yet
- l293d Based Arduino Motor ShieldDocument5 pagesl293d Based Arduino Motor ShieldGabi CiobanuNo ratings yet
- Codigos de Diodos Zener PDFDocument6 pagesCodigos de Diodos Zener PDFEduardo Perez100% (1)
- Physical Design 2Document9 pagesPhysical Design 2bhavana.sd86No ratings yet
- Datasheet1 PDFDocument4 pagesDatasheet1 PDFMuhamad Nuriz BahroniNo ratings yet
- Circuito de FuenteDocument8 pagesCircuito de FuenteEmer nelsonNo ratings yet
- Arduino Shield Ecg EmgDocument20 pagesArduino Shield Ecg EmgIman MirblokiNo ratings yet
- DolWin1 Challenges of Connecting Offshore Wind FarmsDocument11 pagesDolWin1 Challenges of Connecting Offshore Wind Farmsmisener323No ratings yet
- Piezoelectric CeramicsDocument302 pagesPiezoelectric Ceramicsmaikos100% (1)
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- AWR MRHB White PaperDocument6 pagesAWR MRHB White PaperAWR CorporationNo ratings yet
- PU CET (PG) Sample Papers - 1Document51 pagesPU CET (PG) Sample Papers - 1Rubinder SinghNo ratings yet
- Project File FinalkDocument30 pagesProject File FinalkEthio Zena HDNo ratings yet
- Eht Earthing ThesisDocument28 pagesEht Earthing ThesisAnonymous 2l8XJIVNo ratings yet
- RSM120-8-580M-605M: High Performance Monocrystalline Perc ModuleDocument2 pagesRSM120-8-580M-605M: High Performance Monocrystalline Perc Modulechristov JaimeNo ratings yet
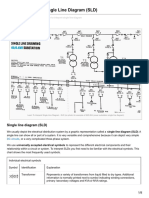
- Learn To Interpret Single Line Diagram (SLD) : Google+Document8 pagesLearn To Interpret Single Line Diagram (SLD) : Google+ShazmaniaNo ratings yet
- Ame 1117Document15 pagesAme 1117Daniel ScottNo ratings yet
- Multiple Choice Questions and Answers On Semiconductor TheoryDocument36 pagesMultiple Choice Questions and Answers On Semiconductor TheoryHENRY SINGCOL75% (4)
- Understanding Transformer PolarityDocument3 pagesUnderstanding Transformer PolarityVENKATESAN R100% (2)
- Intellectual Property Notes For ExamsDocument5 pagesIntellectual Property Notes For ExamsRajkumarKariNo ratings yet
- Transforer Test-Methods PDFDocument55 pagesTransforer Test-Methods PDFkailasamvvNo ratings yet
- Energy Paper - MainDocument18 pagesEnergy Paper - MainAbdulganiyu IsmaeelNo ratings yet
- Magneetic GeneratorDocument14 pagesMagneetic GeneratorIdil FitriNo ratings yet
- 9A04501 Analog Communications7Document4 pages9A04501 Analog Communications7subbuNo ratings yet
- A 28Nm Poly/Sion Cmos Technology For Low-Power Soc ApplicationsDocument2 pagesA 28Nm Poly/Sion Cmos Technology For Low-Power Soc ApplicationsOne TzueNo ratings yet
- Line Follower Robot: A Project Report OnDocument35 pagesLine Follower Robot: A Project Report OnquocNo ratings yet
- 400Hz ConverterDocument2 pages400Hz ConverterThanhha Nguyen100% (2)
- PCBLAB1 Inlab Sep 18 Intro To PCB Design Using Multisin 7Document33 pagesPCBLAB1 Inlab Sep 18 Intro To PCB Design Using Multisin 7Marlon BoucaudNo ratings yet
- Example of Lab ReportDocument6 pagesExample of Lab ReportRomi Necq S. AbuelNo ratings yet
- You're Hired-25 Top Interview Questions For Circuit DesignersDocument4 pagesYou're Hired-25 Top Interview Questions For Circuit DesignersPrasanth YgNo ratings yet
- Panimalar Institute of Technology Set A: Jaisakthi Educational Trust, Chennai - 600 123Document4 pagesPanimalar Institute of Technology Set A: Jaisakthi Educational Trust, Chennai - 600 123DINAKARANNo ratings yet