Download as pdf or txt
You might also like
- Programming For Lathe: Doosan Infracore EZ Guide-IDocument108 pagesProgramming For Lathe: Doosan Infracore EZ Guide-ILuis Angel Oaxaca GarciaNo ratings yet
- Dittel WB-AE Overview ENDocument28 pagesDittel WB-AE Overview ENNhatQuangNguyenNo ratings yet
- DP Guide LSH 3 - 06 Email GeneralDocument16 pagesDP Guide LSH 3 - 06 Email GeneralBobyNo ratings yet
- Module 17 Physics 605Document24 pagesModule 17 Physics 605Automan IntertradeNo ratings yet
- Module 02 Graphical Programming 605Document34 pagesModule 02 Graphical Programming 605hisham_eyesNo ratings yet
- Module 16 Jobs 605Document13 pagesModule 16 Jobs 605Automan IntertradeNo ratings yet
- V5dmu 1Document27 pagesV5dmu 1Xuan Chien100% (1)
- Manual HRSpace3 Eng (051-100) PDFDocument50 pagesManual HRSpace3 Eng (051-100) PDFfatehNo ratings yet
- Application Manual RobotStudio Equipment Builder 1.0Document12 pagesApplication Manual RobotStudio Equipment Builder 1.0venkatNo ratings yet
- RoboCare Manual enDocument17 pagesRoboCare Manual enVoxine OuscularenNo ratings yet
- 6400 MechDocument212 pages6400 MechCristian CanalesNo ratings yet
- Io System Irc5Document24 pagesIo System Irc5Kristal NewtonNo ratings yet
- Robot Series: Hyundai RoboticsDocument8 pagesRobot Series: Hyundai Roboticsjavier50% (2)
- 90203-1085DEB Arc Welding Operation Manual (D Series)Document178 pages90203-1085DEB Arc Welding Operation Manual (D Series)Ihcene BoudaliNo ratings yet
- Robot Setup - KUKADocument25 pagesRobot Setup - KUKADavid de la PeñaNo ratings yet
- World Leading Hardware-Independent Inspection SoftwareDocument11 pagesWorld Leading Hardware-Independent Inspection SoftwarepatgigNo ratings yet
- 3HAC024480-005 Rev14Document164 pages3HAC024480-005 Rev14fjpires_7012100% (1)
- ABB IRB 580 DatasheetDocument1 pageABB IRB 580 Datasheetalex dimoskiNo ratings yet
- BIO Gripper User Manual-V1.6.1Document36 pagesBIO Gripper User Manual-V1.6.1logu jvmNo ratings yet
- ROBOTICS ReportDocument20 pagesROBOTICS ReportSagar KolkarNo ratings yet
- K Roset TrainingDocument22 pagesK Roset Trainingprathipbemech100% (1)
- ATTC Laser CatalogDocument74 pagesATTC Laser CatalogÖzgür AslanNo ratings yet
- NZXNLXPost Processor ManualDocument173 pagesNZXNLXPost Processor ManualOuss AmaNo ratings yet
- ReleaseNotes IndraDrive MPB20VRS ENDocument224 pagesReleaseNotes IndraDrive MPB20VRS ENLinh Pham0% (1)
- World Leading 2, 3 and 5-Axis CAM SoftwareDocument13 pagesWorld Leading 2, 3 and 5-Axis CAM SoftwarepatgigNo ratings yet
- DCE Appendix ADocument22 pagesDCE Appendix AnobamoNo ratings yet
- ABB RAPID Application - Manual Robot - Reference.interface (Woc)Document46 pagesABB RAPID Application - Manual Robot - Reference.interface (Woc)ildvceNo ratings yet
- Fanuc 6 MDocument7 pagesFanuc 6 Mslaven670% (1)
- Datasheet 582221 (80-5250-A0) enDocument3 pagesDatasheet 582221 (80-5250-A0) enjoahan9gonzalezNo ratings yet
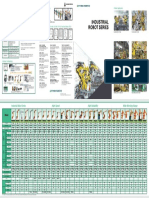
- Hyundai-robotics-Industrial Robot Series Eng 0802Document2 pagesHyundai-robotics-Industrial Robot Series Eng 0802jitender kumar0% (1)
- Share Fanuc Training DocumentDocument95 pagesShare Fanuc Training Documentreofficial429No ratings yet
- Mitsubishi RV FR ManuálDocument218 pagesMitsubishi RV FR ManuálĐô LêNo ratings yet
- PROBHe MDocument7 pagesPROBHe MFernando BatistaNo ratings yet
- 3HAC050959 AM Mechanical Unit Manager RW 6-En PDFDocument28 pages3HAC050959 AM Mechanical Unit Manager RW 6-En PDFGrahamNo ratings yet
- MC400L 600 01 (FD)Document86 pagesMC400L 600 01 (FD)Daniel MarilesNo ratings yet
- The Multi Purpose Painting Robot: FlexibilityDocument2 pagesThe Multi Purpose Painting Robot: FlexibilityGrahamNo ratings yet
- S 420i SerieDocument4 pagesS 420i SerieIbarra Aaron100% (2)
- AS 119345 XG-X 3DVision SG A23GB WW GB 2033 2Document104 pagesAS 119345 XG-X 3DVision SG A23GB WW GB 2033 2DeaNo ratings yet
- Release Notes RobotStudio 2019-5 PDFDocument44 pagesRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaNo ratings yet
- Alpha5 Smart User S Manual English 24c7 e 0016c PDFDocument636 pagesAlpha5 Smart User S Manual English 24c7 e 0016c PDFBayu S Pribadi100% (1)
- 1-CC-Link IE TSN Na EngDocument71 pages1-CC-Link IE TSN Na EngThanh Kieu Nguyen ThiNo ratings yet
- Fanuc Robot OverviewDocument8 pagesFanuc Robot OverviewKhoi NguyenNo ratings yet
- DENSO Brochure enDocument32 pagesDENSO Brochure enRudy BakriNo ratings yet
- Volvo Installation Tool: User ManualDocument22 pagesVolvo Installation Tool: User ManualRodrigo Caldeira SilvaNo ratings yet
- Fast, Accurate Multi-Axis Programming For Robots.: Delcam PLC, AMS Division WWW - Delcam.tvDocument2 pagesFast, Accurate Multi-Axis Programming For Robots.: Delcam PLC, AMS Division WWW - Delcam.tvOscar SaenzNo ratings yet
- FD11 Controller: Standard SpecificationsDocument28 pagesFD11 Controller: Standard SpecificationsMaycon Santos da SilveiraNo ratings yet
- Industrial Robot Laboratory StaeubliDocument17 pagesIndustrial Robot Laboratory StaeubliJesus Said Mercado VegaNo ratings yet
- SFDEN 006 005 - FD11controllerDocument19 pagesSFDEN 006 005 - FD11controllerChris HendersonNo ratings yet
- ARC Mate 100ib, M-6iB Mechanical Unit ManualDocument142 pagesARC Mate 100ib, M-6iB Mechanical Unit ManualPiotrNo ratings yet
- 828D PLC FCT Man 0721 en-USDocument356 pages828D PLC FCT Man 0721 en-USHernan MaynaNo ratings yet
- EU 22 Balduzzi Abusing CNC Technologies WPDocument69 pagesEU 22 Balduzzi Abusing CNC Technologies WPHenrik Dalhof JensenNo ratings yet
- FC106Document6 pagesFC106Hoangvinh DuongNo ratings yet
- Chapter 2-Advanced User Interface Enhancement in WinFormsDocument50 pagesChapter 2-Advanced User Interface Enhancement in WinFormsTanveer Ahmed HakroNo ratings yet
- Spid Iso15926 ReadmeDocument5 pagesSpid Iso15926 ReadmeanjNo ratings yet
- Spindle GMNDocument44 pagesSpindle GMNMr.DiscretNo ratings yet
- Motionpack 110Document275 pagesMotionpack 110Nguyễn Khắc LợiNo ratings yet
- Servo Positioner: Positioner For Coordinated Arc Welding Robot SystemDocument4 pagesServo Positioner: Positioner For Coordinated Arc Welding Robot SystemRicardo Castro SalazarNo ratings yet
- Yaskawa YRC 1000 CC-LInk Configuration Doc - V0Document32 pagesYaskawa YRC 1000 CC-LInk Configuration Doc - V0chetan kulkarniNo ratings yet
- BuildDocument32 pagesBuildapi-3857201No ratings yet
- Module 01 Basics 603Document56 pagesModule 01 Basics 603hisham_eyesNo ratings yet
- IRC5 Basic Operations Student Manual Rev3 SlideshowDocument105 pagesIRC5 Basic Operations Student Manual Rev3 Slideshowhisham_eyesNo ratings yet
- Module 01 Basics 603Document56 pagesModule 01 Basics 603hisham_eyesNo ratings yet
- Chapter 11 - PrototypingDocument30 pagesChapter 11 - Prototypinghisham_eyesNo ratings yet
- Chapter 8 - Concept TestingDocument24 pagesChapter 8 - Concept Testinghisham_eyesNo ratings yet
- Poster Astro Awani - CSDocument1 pagePoster Astro Awani - CShisham_eyesNo ratings yet
- Chapter 10 - Design For ManufacturingDocument21 pagesChapter 10 - Design For Manufacturinghisham_eyesNo ratings yet
- Chapter 2 - Development Process and OrganizationsDocument23 pagesChapter 2 - Development Process and Organizationshisham_eyesNo ratings yet
- Chapter 4 - Identifying Customer NeedsDocument23 pagesChapter 4 - Identifying Customer Needshisham_eyesNo ratings yet
- Chapter 7 - Concept SelectionDocument21 pagesChapter 7 - Concept Selectionhisham_eyesNo ratings yet
- Chapter 4: Isometric and ObliqueDocument28 pagesChapter 4: Isometric and Obliquehisham_eyesNo ratings yet
- Chapter 5 - Product SpecificationsDocument23 pagesChapter 5 - Product Specificationshisham_eyes100% (1)
- Welcome To CIAST and Liquid Penetrant TestingDocument154 pagesWelcome To CIAST and Liquid Penetrant Testinghisham_eyesNo ratings yet
- Beamsaet 3Document8 pagesBeamsaet 3omar_sool2No ratings yet
- Metal - Brazing and Soldering - ProcessesDocument8 pagesMetal - Brazing and Soldering - Processeshisham_eyes100% (1)
- (Answer - 540 N) : Supplied by Freestudy - Co.uk © D.J.DUNNDocument11 pages(Answer - 540 N) : Supplied by Freestudy - Co.uk © D.J.DUNNomar_sool2No ratings yet
- HTTPWWW Actawm PB Edu Plvol4no4grzesen2010006 PDFDocument6 pagesHTTPWWW Actawm PB Edu Plvol4no4grzesen2010006 PDFhisham_eyesNo ratings yet
- Chapter7 ArraysDocument26 pagesChapter7 Arrayshisham_eyesNo ratings yet
- Laplace Transform ExercisesDocument20 pagesLaplace Transform Exerciseshisham_eyesNo ratings yet
- Control System NotesDocument56 pagesControl System Notesatul mishraNo ratings yet