RP Journal 2245-1439 825
RP Journal 2245-1439 825
Download as pdf or txt
You might also like
- Cnfq2 - Mod11 - Write A Draft of Creative Nonfiction Piece Based On The Learner's Memorable Real-Life ExperienceDocument24 pagesCnfq2 - Mod11 - Write A Draft of Creative Nonfiction Piece Based On The Learner's Memorable Real-Life ExperienceJohn Carlo Pineda100% (11)
- State Supervision and Regulations Over Private Educational InstitutionsDocument260 pagesState Supervision and Regulations Over Private Educational InstitutionsantonNo ratings yet
- Multi-Layered Deep Convolutional Neural Network For Object DetectionDocument6 pagesMulti-Layered Deep Convolutional Neural Network For Object DetectionUmamaheswar PutrevuNo ratings yet
- Feature Extraction of High Resolution Satellite ImageDocument2 pagesFeature Extraction of High Resolution Satellite ImageVishakhaNo ratings yet
- DL Anonymous Question BankDocument22 pagesDL Anonymous Question BankAnuradha PiseNo ratings yet
- Thesis (2) RemovedDocument34 pagesThesis (2) Removedpedrotiago112No ratings yet
- 1.convolutional Neural Networks For Image ClassificationDocument11 pages1.convolutional Neural Networks For Image ClassificationMuhammad ShoaibNo ratings yet
- Image Classification Using Small Convolutional Neural NetworkDocument5 pagesImage Classification Using Small Convolutional Neural NetworkKompruch BenjaputharakNo ratings yet
- A High-Accuracy Model Average Ensemble of ConvolutDocument16 pagesA High-Accuracy Model Average Ensemble of ConvolutKedar SawantNo ratings yet
- Deep Learning Approach For Object Detection Using CNN: AbstractDocument7 pagesDeep Learning Approach For Object Detection Using CNN: AbstractAYUSH MISHRANo ratings yet
- Convolutional Neural Networks (Convnets) HaveDocument6 pagesConvolutional Neural Networks (Convnets) HaveNguyễn Minh VũNo ratings yet
- DL_UNIT-4_Part-1Document10 pagesDL_UNIT-4_Part-1bhumanithin8494910661No ratings yet
- Convolutional Neural Network (CNN) : Assignment OnDocument8 pagesConvolutional Neural Network (CNN) : Assignment OnasfawosenNo ratings yet
- DeepCut Unsupervised Segmentation Using Graph Neural Networks ClusteringDocument14 pagesDeepCut Unsupervised Segmentation Using Graph Neural Networks ClusteringSaulo RodriguesNo ratings yet
- A Deep Neural Network For Image Quality AssessmentDocument5 pagesA Deep Neural Network For Image Quality Assessmentgitov13916No ratings yet
- Thesis Report On Image Classification Using ConvDocument9 pagesThesis Report On Image Classification Using ConvRashedul IslamNo ratings yet
- Image Object Classification and Identification Using Soft Computing Tools: A ReviewDocument5 pagesImage Object Classification and Identification Using Soft Computing Tools: A ReviewIJSTENo ratings yet
- Chap 2 DLDocument88 pagesChap 2 DLadityapandeyvlog13No ratings yet
- SayaliDocument7 pagesSayalice.te.b.229.balram.panigrahiNo ratings yet
- Sommaire CNN PresentationDocument10 pagesSommaire CNN Presentationmario DjawouNo ratings yet
- Welding Defect Classification Based On Convolution Neural Network (CNN) and Gaussian KernelDocument5 pagesWelding Defect Classification Based On Convolution Neural Network (CNN) and Gaussian KernelĐào Văn HưngNo ratings yet
- A Survey On Deep Network PDFDocument24 pagesA Survey On Deep Network PDFMateus MeirelesNo ratings yet
- ml2Document70 pagesml2hgiriyapNo ratings yet
- Understanding of Convolutional Neural Network (CNN)Document9 pagesUnderstanding of Convolutional Neural Network (CNN)senthilNo ratings yet
- Advancements in Image Classification Using Convolutional Neural NetworkDocument8 pagesAdvancements in Image Classification Using Convolutional Neural NetworkvamsidayyalaNo ratings yet
- Essay 6Document15 pagesEssay 6noemailokisaidnoNo ratings yet
- Deep Learning Image ClassificationDocument11 pagesDeep Learning Image ClassificationPRIYANKA TATANo ratings yet
- Deep LearningUNIT-IVDocument16 pagesDeep LearningUNIT-IVnikhilsinha0099No ratings yet
- Object Detection Using CNNDocument5 pagesObject Detection Using CNNHi ManshuNo ratings yet
- Paper 82-Hyperspectral Image ClassificationDocument7 pagesPaper 82-Hyperspectral Image ClassificationDharmi JaviyaNo ratings yet
- Convolution in Machine LearningDocument2 pagesConvolution in Machine Learning92hussnainaliNo ratings yet
- Unit 3 MLDocument27 pagesUnit 3 MLplayscore07No ratings yet
- Yunchao Eccv14 MopcnnDocument17 pagesYunchao Eccv14 MopcnnArnob TanjimNo ratings yet
- Module 5Document8 pagesModule 5PRAJWAL SINGHNo ratings yet
- Sensors: Depth Estimation and Semantic Segmentation From A Single RGB Image Using A Hybrid Convolutional Neural NetworkDocument20 pagesSensors: Depth Estimation and Semantic Segmentation From A Single RGB Image Using A Hybrid Convolutional Neural NetworkKratika VarshneyNo ratings yet
- What Should You Consider or Pay Attention To When Preparing A Data SetDocument7 pagesWhat Should You Consider or Pay Attention To When Preparing A Data Setnazmulhaque341No ratings yet
- Understanding of Convolutional Neural Network (CNN) - Deep LearningDocument7 pagesUnderstanding of Convolutional Neural Network (CNN) - Deep LearningKashaf BakaliNo ratings yet
- What Is Convolutional Neural NetworkDocument16 pagesWhat Is Convolutional Neural Networkahmedliet143No ratings yet
- IJRPR2126Document6 pagesIJRPR2126Sawsen BakhiNo ratings yet
- MODULE 3Document26 pagesMODULE 3vaishbhat19No ratings yet
- Introduction To CNNsDocument26 pagesIntroduction To CNNsBasant AgarwalNo ratings yet
- Zamir 2022 Mirnetv2Document15 pagesZamir 2022 Mirnetv2navya.cogni21No ratings yet
- Transfer Learning With Convolutional Neural Networks For Iris RecognitionDocument18 pagesTransfer Learning With Convolutional Neural Networks For Iris RecognitionAdam HansenNo ratings yet
- A Deep Learning Convolutional Neural Network in Health Care EnvironmentDocument17 pagesA Deep Learning Convolutional Neural Network in Health Care EnvironmentVasiha Fathima RNo ratings yet
- AIDS2 Assignment 2Document7 pagesAIDS2 Assignment 2vai.2c20No ratings yet
- CNN Model Introduction and OverviewDocument2 pagesCNN Model Introduction and OverviewHari hara Sudhan .MNo ratings yet
- An Algorithmic Approach For Efficient Image Compression Using Neuro-Wavelet Model and Fuzzy Vector Quantization TechniqueDocument9 pagesAn Algorithmic Approach For Efficient Image Compression Using Neuro-Wavelet Model and Fuzzy Vector Quantization Techniqueswarup86No ratings yet
- DLT Unit-4Document25 pagesDLT Unit-4TONY 562No ratings yet
- (IJCST-V10I5P12) :mrs J Sarada, P Priya BharathiDocument6 pages(IJCST-V10I5P12) :mrs J Sarada, P Priya BharathiEighthSenseGroupNo ratings yet
- Unit-4 RelDocument3 pagesUnit-4 Rel20AD022 KAMALI PRIYA SNo ratings yet
- 20174911-Assignment 5-NNDocument6 pages20174911-Assignment 5-NNprog anasNo ratings yet
- Understanding of Convolutional Neural Network (CNN) - Deep Learning - by Prabhu - MediumDocument8 pagesUnderstanding of Convolutional Neural Network (CNN) - Deep Learning - by Prabhu - Mediumandres alfonso varelo silgadoNo ratings yet
- CV Lab 12 - Implementatin of a Simple CNNDocument9 pagesCV Lab 12 - Implementatin of a Simple CNNHashaam ZafarNo ratings yet
- KNN and SVM Based Satellite Image Classification: IjireeiceDocument5 pagesKNN and SVM Based Satellite Image Classification: IjireeiceNajoua AziziNo ratings yet
- Recklessly Approximate Sparse CodingDocument35 pagesRecklessly Approximate Sparse CodingHiep Nguyen VanNo ratings yet
- Image Classification Using CNN: Page - 1Document13 pagesImage Classification Using CNN: Page - 1BhanuprakashNo ratings yet
- Deep Learning Unit2Document43 pagesDeep Learning Unit2attackontitans.blackloverNo ratings yet
- CNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GDocument10 pagesCNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GTJPRC PublicationsNo ratings yet
- Unit 2 Convolutional Neural NetworkDocument16 pagesUnit 2 Convolutional Neural NetworkReasonNo ratings yet
- Fuzzy C-Means Clustering Using Principal Component Analysis For Image SegmentationDocument4 pagesFuzzy C-Means Clustering Using Principal Component Analysis For Image SegmentationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ML - Unit - 2Document13 pagesML - Unit - 2Dr D S Naga Malleswara RaoNo ratings yet
- Practical Research 1 Lesson PlanDocument2 pagesPractical Research 1 Lesson PlanHarley LausNo ratings yet
- Cot in Science 5 Harmful and UsefulDocument3 pagesCot in Science 5 Harmful and UsefulIVONE GRACE TABIOS75% (4)
- Understanding Your College Experience 2nd Edition Gardner Test Bank DownloadDocument14 pagesUnderstanding Your College Experience 2nd Edition Gardner Test Bank DownloadKarl Telford100% (23)
- Session PlanDocument3 pagesSession PlanLyndsay Anderson88% (8)
- Mental Retardation Mental RetardationDocument2 pagesMental Retardation Mental RetardationMaia Joyce SagerNo ratings yet
- Chen CVDocument1 pageChen CVapi-403612143No ratings yet
- Quarterly Assessment Report in Mathematics Grade 1 First Quarter, SY 2019-2020Document5 pagesQuarterly Assessment Report in Mathematics Grade 1 First Quarter, SY 2019-2020William Felisilda100% (1)
- Chapter-4-EDCK6 2Document6 pagesChapter-4-EDCK6 2Dimple De Lana MendozaNo ratings yet
- The Role of The First LanguageDocument1 pageThe Role of The First Languagequynhthy189No ratings yet
- Reflection After Lesson 5Document2 pagesReflection After Lesson 5api-307403301100% (2)
- PLP Proforma Shannon MolloyDocument14 pagesPLP Proforma Shannon Molloyapi-512922287No ratings yet
- Lesson Plan - Smart Start 1Document8 pagesLesson Plan - Smart Start 1Bee Chick0% (1)
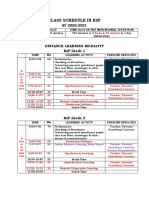
- Class Schedule in Esp: Regular Time Slot Time Slot in The New Normal SituationDocument5 pagesClass Schedule in Esp: Regular Time Slot Time Slot in The New Normal SituationCELIA ROSE DUMILE LINGAYANo ratings yet
- Completed Report - ProjectDocument6 pagesCompleted Report - ProjectSya AzuraNo ratings yet
- Name: Polycarp C. Nieves Date: October 25, 2020 Subject: Educ 6 - Assessment of Learning Reflection #3Document1 pageName: Polycarp C. Nieves Date: October 25, 2020 Subject: Educ 6 - Assessment of Learning Reflection #3poyNo ratings yet
- 4 - Artikel Gustiani (16-22)Document7 pages4 - Artikel Gustiani (16-22)Yani Saputra YuhdarNo ratings yet
- Community Reading ProposalDocument2 pagesCommunity Reading ProposalCHERRY S. MONDERINNo ratings yet
- Emily Carr Lesson N Deciantis WaoDocument18 pagesEmily Carr Lesson N Deciantis Waoapi-350189121No ratings yet
- Teodoro M. Kalaw Memorial School Balintawak, Lipa City Weekly Home Learning Plan Grade: 5 - ST LUKE Quarter: 1 Week: 5 (November 2-6, 2020)Document2 pagesTeodoro M. Kalaw Memorial School Balintawak, Lipa City Weekly Home Learning Plan Grade: 5 - ST LUKE Quarter: 1 Week: 5 (November 2-6, 2020)Kathrina De CastroNo ratings yet
- Chapter 3 Age and AcquisitionDocument43 pagesChapter 3 Age and Acquisitionzaklooch100% (3)
- Homeroom Guidance: MODULE 7: I Decide, I LearnDocument15 pagesHomeroom Guidance: MODULE 7: I Decide, I LearnPrecious FacinalNo ratings yet
- Daily Lesson Plan: 12 On The Farm World of KnowledgeDocument6 pagesDaily Lesson Plan: 12 On The Farm World of KnowledgeNur'Raili Akhmal KiplieNo ratings yet
- Monday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogDocument4 pagesMonday Tuesday Wednesday Thursday Friday: GRADES 1 To 12 Daily Lesson LogFranz Wendell BalagbisNo ratings yet
- Creative Arts, Music, and Movements in Early Childhood EducationDocument21 pagesCreative Arts, Music, and Movements in Early Childhood EducationAj perezNo ratings yet
- Lesson Planning. Tuv 2022Document13 pagesLesson Planning. Tuv 2022Mahmoud YousefNo ratings yet
- Homework at 2amDocument7 pagesHomework at 2amcfdbfeb6100% (1)
- Math 10 Quarter 3 Module 28Document18 pagesMath 10 Quarter 3 Module 28lilacNo ratings yet
- Studying in Malaysia: Your Essential Guide 2019Document18 pagesStudying in Malaysia: Your Essential Guide 2019Syed Nadeem AhmedNo ratings yet