Self-Driving Cars: Cover Feature
Self-Driving Cars: Cover Feature
Download as pdf or txt
You might also like
- An Examination of MTSS Assessment and Decision Making Practices For English LearnersDocument15 pagesAn Examination of MTSS Assessment and Decision Making Practices For English LearnersRita NoitesNo ratings yet
- Literature Review Imperial CollegeDocument4 pagesLiterature Review Imperial Collegeafmzitaaoxahvp100% (1)
- OFAD 30025 - Foundation of Shorthand (IM)Document192 pagesOFAD 30025 - Foundation of Shorthand (IM)Jessel HarinaNo ratings yet
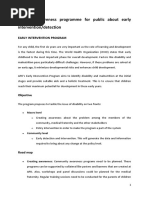
- Conduct Awareness Programme For Public About Early Intervention/detectionDocument11 pagesConduct Awareness Programme For Public About Early Intervention/detectionMuhammad Rafiuddin100% (5)
- The Development of A Self-Driving BusDocument10 pagesThe Development of A Self-Driving BusInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application_of_Machine_learning_Algorithms_in_AutoDocument8 pagesApplication_of_Machine_learning_Algorithms_in_AutoCharu ReddyNo ratings yet
- H ARSWARE3Document7 pagesH ARSWARE3rajuNo ratings yet
- Autonomous Self Driving Car Using Raspberry Pi Model IJERTCONV7IS08081Document3 pagesAutonomous Self Driving Car Using Raspberry Pi Model IJERTCONV7IS08081Sharmila MathavanNo ratings yet
- Innovations in the Automotive Industry_ The Future of CarsDocument3 pagesInnovations in the Automotive Industry_ The Future of CarsveekshiNo ratings yet
- Self-Driving Cars Case StudyDocument6 pagesSelf-Driving Cars Case StudyJOHN MANTHINo ratings yet
- Irjet V11i630Document8 pagesIrjet V11i630Gokul K VNo ratings yet
- Tits 2020 2980855Document15 pagesTits 2020 2980855rahul rNo ratings yet
- White Paper Autonomous Cars WebDocument36 pagesWhite Paper Autonomous Cars WebHậu PhạmNo ratings yet
- Shivam Research PaperDocument2 pagesShivam Research PaperParasram MaliNo ratings yet
- ITS-Module-4-Technology Building Blocks For ITSDocument18 pagesITS-Module-4-Technology Building Blocks For ITS1rn21cd058.vikasusNo ratings yet
- AI WITH CARS English VEP Gatik IX 2ndDocument3 pagesAI WITH CARS English VEP Gatik IX 2ndaggarwalgatikNo ratings yet
- AUTOMOTIVE Written ReportsDocument12 pagesAUTOMOTIVE Written ReportspendatunaloyodanNo ratings yet
- The Future of MobilityDocument16 pagesThe Future of MobilityCiobanu MihaiNo ratings yet
- Pest AnalysisDocument25 pagesPest AnalysisVartica KhannaNo ratings yet
- Iot WhoownstheroadDocument20 pagesIot WhoownstheroadAnish DalmiaNo ratings yet
- 3rd Generation AutomobileDocument7 pages3rd Generation AutomobileAshwani MattooNo ratings yet
- Technological Advancement of Automotive IndustryDocument6 pagesTechnological Advancement of Automotive IndustryaspectNo ratings yet
- Motor Industry by The Year 2020Document10 pagesMotor Industry by The Year 2020anon_13341922No ratings yet
- Running Head: Emerging TechnologiesDocument11 pagesRunning Head: Emerging TechnologiesCarlos AlphonceNo ratings yet
- Automotive Autonomous Driving Vision PaperDocument4 pagesAutomotive Autonomous Driving Vision PaperOktavian Bagas Dewa100% (1)
- Ingenious BizWiz Case - ESAPDocument9 pagesIngenious BizWiz Case - ESAPSaurabh KhopadeNo ratings yet
- Aguila JImenez Mario ProjectoDocument18 pagesAguila JImenez Mario ProjectoMARIO ANTONIO AGUILA JIMENEZNo ratings yet
- Ram TPPDocument11 pagesRam TPPJogu PavankalyanNo ratings yet
- Digital Transformation in The Auto Industry Fueled by C.A.S.EDocument5 pagesDigital Transformation in The Auto Industry Fueled by C.A.S.EShashank ChheniyaNo ratings yet
- Case 5 - Mohammed JadbanDocument5 pagesCase 5 - Mohammed JadbanAbdulrahman DhabaanNo ratings yet
- Cleveland Research Company Stock Pitch 2016 EntryDocument24 pagesCleveland Research Company Stock Pitch 2016 EntryNguyen D. Nguyen100% (1)
- Google's Driverless Car Project PDFDocument3 pagesGoogle's Driverless Car Project PDFGanesh KumarNo ratings yet
- Automated CarDocument8 pagesAutomated CarRockyNo ratings yet
- Smart Cars An Overview On The Current Status and Future PerspDocument16 pagesSmart Cars An Overview On The Current Status and Future Perspanila kousarNo ratings yet
- Conected Car India Market StudyDocument8 pagesConected Car India Market StudyTijo ThomasNo ratings yet
- Allen Emma 2.iiiDocument5 pagesAllen Emma 2.iiiLawrd RrafieNo ratings yet
- Intelligent Transport System (1) NewDocument5 pagesIntelligent Transport System (1) NewSean HarshaNo ratings yet
- On Track With Connected & Self-Driving Vehicles: WhitepaperDocument8 pagesOn Track With Connected & Self-Driving Vehicles: Whitepapermadil81No ratings yet
- Autonomous Cars Using Embedded Systems & Spherical WheelsDocument5 pagesAutonomous Cars Using Embedded Systems & Spherical WheelsDionisie LefterNo ratings yet
- IOT HA - PaperDocument10 pagesIOT HA - PaperPratik DixitNo ratings yet
- Introduction Application of Emerging Technology in The Indian Automotive IndustryDocument1 pageIntroduction Application of Emerging Technology in The Indian Automotive Industrynm646000No ratings yet
- Driverless CARDocument16 pagesDriverless CARAbhimanyu Singh BhatiNo ratings yet
- Self Parking Capability in Daily Use Cars: Group MembersDocument26 pagesSelf Parking Capability in Daily Use Cars: Group MembersFahad RizwanNo ratings yet
- Autonomous Cars - Research Results, Issues, and Future Challenges - Hussain, Autonomous Cars Research Results, Issues, and Future ChallengesDocument39 pagesAutonomous Cars - Research Results, Issues, and Future Challenges - Hussain, Autonomous Cars Research Results, Issues, and Future Challengesosamasaleem4862No ratings yet
- Comparative Analysis of Radio Taxi SectorDocument26 pagesComparative Analysis of Radio Taxi SectorsajalNo ratings yet
- Case StudyDocument11 pagesCase Studyaman.khan24No ratings yet
- Research Paper Final YearDocument9 pagesResearch Paper Final YearpdjwjkscbeareknqhsNo ratings yet
- Survey On Artificial Intelligence For Vehicles PDFDocument13 pagesSurvey On Artificial Intelligence For Vehicles PDFRodrigo DazaNo ratings yet
- A.I. Powered Autonomous VehiclesDocument6 pagesA.I. Powered Autonomous Vehicleskumar satyamNo ratings yet
- Feasibility Analysis of Driverless Car Using Vanets: 1.2 Google Driver Less CarDocument3 pagesFeasibility Analysis of Driverless Car Using Vanets: 1.2 Google Driver Less CarhrishikeshNo ratings yet
- Applsci 10 02749 v2Document29 pagesApplsci 10 02749 v2حسام جعفر كاظمNo ratings yet
- Self Driving VehicleDocument5 pagesSelf Driving VehicleRohit ChavanNo ratings yet
- Investments in Smart Transportation - Global & Local Trends. - Shirley ShefferDocument24 pagesInvestments in Smart Transportation - Global & Local Trends. - Shirley ShefferLogtelNo ratings yet
- Self Drive IEEE Conference Template 1Document5 pagesSelf Drive IEEE Conference Template 1Anant vikram SinghNo ratings yet
- BE AI in Auto IndustryDocument3 pagesBE AI in Auto Industryimursoln15No ratings yet
- Highly Automated Vehicles and Self-Driving Cars: Industry TutorialDocument7 pagesHighly Automated Vehicles and Self-Driving Cars: Industry TutorialJulius Fusic SNo ratings yet
- 74 134 1 SMDocument5 pages74 134 1 SM王施甯No ratings yet
- (Article) Strategy For Development of Intelligent Vehicles - CNDRDocument10 pages(Article) Strategy For Development of Intelligent Vehicles - CNDRLeslieNo ratings yet
- Recent Trends in AutomobilesDocument23 pagesRecent Trends in AutomobilesVivekanand Chockalingam100% (1)
- AI WITH CARS English VEP Gatik IX 2ndDocument3 pagesAI WITH CARS English VEP Gatik IX 2ndaggarwalgatikNo ratings yet
- IoT Applications in TransportationDocument10 pagesIoT Applications in Transportation有川静寂No ratings yet
- How 5G Is Driving The Auto Industry ForwardDocument15 pagesHow 5G Is Driving The Auto Industry ForwardSUBHADIP DASNo ratings yet
- Vehicle Infrastructure Integration: Unlocking Insights and Advancements through Computer VisionFrom EverandVehicle Infrastructure Integration: Unlocking Insights and Advancements through Computer VisionNo ratings yet
- Self Driving Data Fleet v2Document26 pagesSelf Driving Data Fleet v2Abdo ElmessiouiNo ratings yet
- Minovski 2020Document17 pagesMinovski 2020Abdo ElmessiouiNo ratings yet
- Schindler CopingWithComplexDrivingScenarios ExploratoryScenarioDesign DSC2014Document8 pagesSchindler CopingWithComplexDrivingScenarios ExploratoryScenarioDesign DSC2014Abdo ElmessiouiNo ratings yet
- Pelliccione 2017Document18 pagesPelliccione 2017Abdo ElmessiouiNo ratings yet
- Laser Radar: Historical Prospective - From The East To The WestDocument25 pagesLaser Radar: Historical Prospective - From The East To The WestAbdo ElmessiouiNo ratings yet
- Water Hazard Detection Using Conditional Generative Adversarial Network With Mixture Reflection Attention UnitsDocument10 pagesWater Hazard Detection Using Conditional Generative Adversarial Network With Mixture Reflection Attention UnitsAbdo ElmessiouiNo ratings yet
- Loreal SDocument3 pagesLoreal Sapi-430414382No ratings yet
- Get Mafia Casanova 1st Edition M. Robinson free all chaptersDocument65 pagesGet Mafia Casanova 1st Edition M. Robinson free all chaptershakimleang0q100% (1)
- MARK956 Subject Outline T1 2024 31 JanDocument22 pagesMARK956 Subject Outline T1 2024 31 JanMustafa ChawdharyNo ratings yet
- The ASSURE Mode1Document5 pagesThe ASSURE Mode1Melendez, Abegail T.No ratings yet
- How To Use This Competency Based Learning Materials.: Perform Plumbing Repair and Maintenance WorkDocument5 pagesHow To Use This Competency Based Learning Materials.: Perform Plumbing Repair and Maintenance WorkJeddah CanezaNo ratings yet
- Examples of Qualitative Research TitlesDocument2 pagesExamples of Qualitative Research TitleshydeNo ratings yet
- Tech 2 - Module 1Document53 pagesTech 2 - Module 1Kimberly TabalbaNo ratings yet
- Readings in Philippine History: Quirino State UniversityDocument52 pagesReadings in Philippine History: Quirino State Universityraffy100% (2)
- CV-Erick-Supondha Untuk DANDocument3 pagesCV-Erick-Supondha Untuk DANaffan fathorNo ratings yet
- Week 3 Expressing Thoughts and FeelingsDocument20 pagesWeek 3 Expressing Thoughts and FeelingsPhoebe TanNo ratings yet
- Dress - Making - CITS1.1 - NSQF-6Document33 pagesDress - Making - CITS1.1 - NSQF-6YUVA VinayakNo ratings yet
- Empty AanexureDocument1 pageEmpty Aanexurevenkat rajNo ratings yet
- JUNE 2023 - JUNE 2025: - Study There - Apply For Csir-Net JRFDocument1 pageJUNE 2023 - JUNE 2025: - Study There - Apply For Csir-Net JRFNamasteNo ratings yet
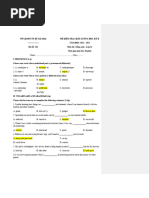
- Đề kiểm tra giữa học kì 2 môn anh văn lớp 11 mã đề 102Document4 pagesĐề kiểm tra giữa học kì 2 môn anh văn lớp 11 mã đề 102nhivo085405No ratings yet
- Community Final Reviewer Part 2Document2 pagesCommunity Final Reviewer Part 2Hyacinth ZapicoNo ratings yet
- MBTI Distribution RateDocument54 pagesMBTI Distribution RateVania FlorensiaNo ratings yet
- CEFR & Blooms Taxonomy WS - Act.1Document2 pagesCEFR & Blooms Taxonomy WS - Act.1T A E S O ONo ratings yet
- Lesson Plan School: Smp/Mts Subject: Bahasa Inggris Grade/Semester: VII/1 Time Allocation: 15 Minutes (1 X Meeting) Topic Skill: Speaking MeetingDocument7 pagesLesson Plan School: Smp/Mts Subject: Bahasa Inggris Grade/Semester: VII/1 Time Allocation: 15 Minutes (1 X Meeting) Topic Skill: Speaking MeetingSiti FatimahNo ratings yet
- BP5 MeduguDocument14 pagesBP5 MeduguBayeNo ratings yet
- Accommodations for 2024 ZJUTers 新生住宿Document5 pagesAccommodations for 2024 ZJUTers 新生住宿elmahdichouiref2000No ratings yet
- Viteee 2017Document6 pagesViteee 2017Manoj PaneriNo ratings yet
- Lecture Timetable For Semester 1 Session 2019/2020 Faculty of Languages & Communication (FBK)Document3 pagesLecture Timetable For Semester 1 Session 2019/2020 Faculty of Languages & Communication (FBK)THILAGAVATHI A/P VAYYAPURI MoeNo ratings yet
- Self Introduction PDFDocument12 pagesSelf Introduction PDFconsuNo ratings yet
- Implementation of Blended Learning Through Smartphonebased Applications in Disaster in Nursing CoursesDocument9 pagesImplementation of Blended Learning Through Smartphonebased Applications in Disaster in Nursing CoursesZilbran BerontaxNo ratings yet
- NEXTDC Electrical Engineer - SmartRecruitersDocument2 pagesNEXTDC Electrical Engineer - SmartRecruitersTosikur RahmanNo ratings yet
- Ee 5Document2 pagesEe 5herleprasNo ratings yet