Download as pdf or txt
You might also like
- Clark Robinson - Dynamical Systems - Stability, Symbolic Dynamics, and Chaos 2nd Edition (Studies in Advanced Mathematics) - CRC Press (1998)Document522 pagesClark Robinson - Dynamical Systems - Stability, Symbolic Dynamics, and Chaos 2nd Edition (Studies in Advanced Mathematics) - CRC Press (1998)laura.embusNo ratings yet
- Overhead Line DesignDocument37 pagesOverhead Line DesignPramod B.Wankhade100% (4)
- Classical Mechanics: Vector AnalysisDocument4 pagesClassical Mechanics: Vector AnalysisEpic WinNo ratings yet
- Classical Mechanics: Central Force MotionDocument6 pagesClassical Mechanics: Central Force MotionEpic WinNo ratings yet
- Harmonic Perturbations: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument4 pagesHarmonic Perturbations: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Formal Structure of QM (Ii) : Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument5 pagesFormal Structure of QM (Ii) : Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Classical Mechanics: Calculus of VariationsDocument4 pagesClassical Mechanics: Calculus of VariationsEpic WinNo ratings yet
- Electricity and Magnetism: Review of Vector AnalysisDocument4 pagesElectricity and Magnetism: Review of Vector AnalysisEpic WinNo ratings yet
- Math Physics: Integral Calculus For VectorsDocument4 pagesMath Physics: Integral Calculus For VectorsEpic WinNo ratings yet
- Math Physics: Conformal MappingDocument4 pagesMath Physics: Conformal MappingEpic WinNo ratings yet
- Fourier Analysis and Wave Packets: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument4 pagesFourier Analysis and Wave Packets: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Math Physics: Fourier Integrals: Part 1Document4 pagesMath Physics: Fourier Integrals: Part 1Epic WinNo ratings yet
- As Physics Coursework Quality of Measurement ExamplesDocument8 pagesAs Physics Coursework Quality of Measurement Examplesf0jimub1lef2100% (1)
- Relativity: Relativistic Kinematics and Einsteinian OpticsDocument4 pagesRelativity: Relativistic Kinematics and Einsteinian OpticsEpic WinNo ratings yet
- Classical Mechanics: Driven OscillationsDocument4 pagesClassical Mechanics: Driven OscillationsEpic WinNo ratings yet
- Relativity: Weak-Field Approximation and Gravitational WavesDocument4 pagesRelativity: Weak-Field Approximation and Gravitational WavesEpic WinNo ratings yet
- Classical Mechanics: Rigid Bodies The Inertia TensorDocument4 pagesClassical Mechanics: Rigid Bodies The Inertia TensorEpic WinNo ratings yet
- Mechanical Engineering Dynamics: (Higher)Document53 pagesMechanical Engineering Dynamics: (Higher)Anonymous FGryb4rEgNNo ratings yet
- Multidimensional Data AnalysisDocument24 pagesMultidimensional Data AnalysisNovia WidyaNo ratings yet
- The SCHR Odinger Equation: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument5 pagesThe SCHR Odinger Equation: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- 8th Grade PBLDocument9 pages8th Grade PBLapi-268936305No ratings yet
- Barron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewFrom EverandBarron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewNo ratings yet
- AFEM Ch01Document15 pagesAFEM Ch01Kim NovisNo ratings yet
- Math Physics: Analytic FunctionsDocument5 pagesMath Physics: Analytic FunctionsEpic WinNo ratings yet
- Rectangular Potentials: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument4 pagesRectangular Potentials: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Module Physics For EngineersDocument43 pagesModule Physics For EngineersASTRERO John Denver F.No ratings yet
- Research Paper On Quantum MechanicsDocument6 pagesResearch Paper On Quantum Mechanicsvguomivnd100% (1)
- Physics AM 26: SyllabusDocument20 pagesPhysics AM 26: SyllabusBernice JohnsonNo ratings yet
- Math Physics: Vector Algebra: A ReviewDocument6 pagesMath Physics: Vector Algebra: A ReviewEpic WinNo ratings yet
- Phasors: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument6 pagesPhasors: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- The Gravitational Field: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument6 pagesThe Gravitational Field: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Computer Science Project WorkDocument21 pagesComputer Science Project Workเชี่ย คุณNo ratings yet
- Engineering Mechanics Course Out ComesDocument5 pagesEngineering Mechanics Course Out ComesallakagopichandNo ratings yet
- TextbookDocument100 pagesTextbookgreys0undNo ratings yet
- Time-Dependent Perturbations I: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument5 pagesTime-Dependent Perturbations I: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Lecture01 Spring05 PDFDocument25 pagesLecture01 Spring05 PDFtripratiwi4586No ratings yet
- 3.b.tech ME 3rd Sem Syllabus UEMJ-1Document18 pages3.b.tech ME 3rd Sem Syllabus UEMJ-1Saswat SharmaNo ratings yet
- A Case Study On Projectile MotionDocument6 pagesA Case Study On Projectile MotionEditor IJTSRDNo ratings yet
- Electricity and Magnetism: Magnetostatics Induction, Vector PotentialDocument6 pagesElectricity and Magnetism: Magnetostatics Induction, Vector PotentialEpic WinNo ratings yet
- Physics A LevelDocument17 pagesPhysics A LevelvickycamilleriNo ratings yet
- The Dirac Delta Function: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument4 pagesThe Dirac Delta Function: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic Win100% (1)
- Relativity: Einstein'S Field EquationsDocument4 pagesRelativity: Einstein'S Field EquationsEpic WinNo ratings yet
- Projects 2015Document45 pagesProjects 2015Steven ArcadoNo ratings yet
- Dissertation Mit BachelorDocument6 pagesDissertation Mit BachelorWhereToBuyResumePaperUK100% (1)
- Huang. A Concise Introduction To Mechanics of Rigid BodiesDocument197 pagesHuang. A Concise Introduction To Mechanics of Rigid BodiesCandis Sharp100% (1)
- Prelim (2) - Physics-1 ModuleDocument52 pagesPrelim (2) - Physics-1 ModuleHerrera, Mark NathanielNo ratings yet
- Phy 107Document2 pagesPhy 107fahadNo ratings yet
- 1706 06446 PDFDocument36 pages1706 06446 PDFعمرو دراغمةNo ratings yet
- " Physics" With Calculus Concurrent Minimal Requirement: Math 140 "First Semester Calculus" Text: Halliday Resnick Walker, Fundamentals of Physics, Extended, 9th EditionDocument16 pages" Physics" With Calculus Concurrent Minimal Requirement: Math 140 "First Semester Calculus" Text: Halliday Resnick Walker, Fundamentals of Physics, Extended, 9th Editionjchwa04No ratings yet
- Module - 1Document25 pagesModule - 1Cedric EnticoNo ratings yet
- Relativistic Energy and Momentum: DerivationDocument4 pagesRelativistic Energy and Momentum: DerivationEpic WinNo ratings yet
- Relativity: Minkowski Diagrams, Space-Time IntervalsDocument4 pagesRelativity: Minkowski Diagrams, Space-Time IntervalsEpic WinNo ratings yet
- Unit 3 Physics Motion v5Document43 pagesUnit 3 Physics Motion v5123HopperNo ratings yet
- 4th Grade Ngss StandardsDocument8 pages4th Grade Ngss Standardsapi-261541929No ratings yet
- W24 PHY-NYA-701 Classical Mechanics OUTLINEDocument9 pagesW24 PHY-NYA-701 Classical Mechanics OUTLINEs0ph13.sushiNo ratings yet
- Physics Honor's SyllabusDocument39 pagesPhysics Honor's Syllabusmoives pointNo ratings yet
- Book-16 FMDocument10 pagesBook-16 FMYsharath ChandramouliNo ratings yet
- Transitions and Spectral Analysis: Two Slit Images (Two Lines)Document4 pagesTransitions and Spectral Analysis: Two Slit Images (Two Lines)Epic WinNo ratings yet
- Warning Signs of A Possible Collapse of Contemporary MathematicsDocument12 pagesWarning Signs of A Possible Collapse of Contemporary MathematicsEpic WinNo ratings yet
- Syntax and Semantics: WWW - Math.princeton - Edu Nelson Papers - HTMLDocument7 pagesSyntax and Semantics: WWW - Math.princeton - Edu Nelson Papers - HTMLEpic WinNo ratings yet
- InequalitiesDocument192 pagesInequalitiesEpic Win100% (2)
- The Mystery of Stochastic MechanicsDocument18 pagesThe Mystery of Stochastic MechanicsEpic WinNo ratings yet
- Mathematics and The Mind: Nelson/papers - HTMLDocument6 pagesMathematics and The Mind: Nelson/papers - HTMLEpic WinNo ratings yet
- RomeDocument7 pagesRomeEpic WinNo ratings yet
- Understanding Intuitionism: WWW - Math.princeton - Edu Nelson Papers - HTMLDocument20 pagesUnderstanding Intuitionism: WWW - Math.princeton - Edu Nelson Papers - HTMLEpic WinNo ratings yet
- Nelson BibDocument5 pagesNelson BibEpic WinNo ratings yet
- IstDocument34 pagesIstEpic WinNo ratings yet
- Edward NelsonDocument1 pageEdward NelsonEpic WinNo ratings yet
- Hilbert's Mistake: Edward Nelson Department of Mathematics Princeton UniversityDocument27 pagesHilbert's Mistake: Edward Nelson Department of Mathematics Princeton UniversityEpic WinNo ratings yet
- HopeDocument4 pagesHopeEpic WinNo ratings yet
- Internal Set TheoryDocument26 pagesInternal Set TheoryEpic WinNo ratings yet
- J. P. MayDocument17 pagesJ. P. MayEpic WinNo ratings yet
- J-Spectra For A Quotient Group J of G. That Context Gives An Interesting SituationDocument9 pagesJ-Spectra For A Quotient Group J of G. That Context Gives An Interesting SituationEpic WinNo ratings yet
- Probability Theory: 1 Heuristic IntroductionDocument17 pagesProbability Theory: 1 Heuristic IntroductionEpic WinNo ratings yet
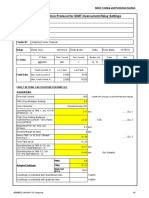
- Setting Calculation Protocol For IDMT Over Current RelayDocument2 pagesSetting Calculation Protocol For IDMT Over Current Relayrefaate100% (3)
- October 2021 Int A Level FinalDocument16 pagesOctober 2021 Int A Level Finalabrar mahir SahilNo ratings yet
- Cad SyllabusDocument5 pagesCad SyllabusSachi DhanandamNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument12 pagesCambridge International Advanced Subsidiary and Advanced LevelPeter TaremwaNo ratings yet
- Kompozit Sınav SorularıDocument13 pagesKompozit Sınav SorularıBilim KapsülüNo ratings yet
- Waves and Rays in Elastic ContinuaDocument20 pagesWaves and Rays in Elastic ContinuaLiana RitterNo ratings yet
- Estimate Vibration Risk For Relief and Process PipingDocument28 pagesEstimate Vibration Risk For Relief and Process PipingTeknologi TermutakhirNo ratings yet
- Elecrtical Thrust Vector Control Details - Tillo VanthuyneDocument7 pagesElecrtical Thrust Vector Control Details - Tillo VanthuyneCosmisteNo ratings yet
- Solutions 05Document3 pagesSolutions 05Jp PandeyNo ratings yet
- Chap 5 CamsDocument47 pagesChap 5 CamsAlysNo ratings yet
- Dokumen - Tips - Vertical Raw Mill Heat Balance SolutionDocument3 pagesDokumen - Tips - Vertical Raw Mill Heat Balance SolutionRamadhani AhdiyakaNo ratings yet
- LM7805Document9 pagesLM7805derf86No ratings yet
- 04 Dse Math 2014 Paper 1 Solution OnlyDocument7 pages04 Dse Math 2014 Paper 1 Solution OnlyHerrscher of GamezNo ratings yet
- CH5 Drilling FluidsDocument48 pagesCH5 Drilling FluidsThev Ruban100% (1)
- As Maths Unit 2 Question Paper Jan20Document24 pagesAs Maths Unit 2 Question Paper Jan20Vedant DasNo ratings yet
- Electrical & Electronics Measurement Lab ManualDocument64 pagesElectrical & Electronics Measurement Lab ManualHari Krish100% (1)
- DM Plant OperationDocument23 pagesDM Plant OperationKanaga Sundaram80% (5)
- Dissertation - Fractal Content Khajuraho TemplesDocument50 pagesDissertation - Fractal Content Khajuraho TemplesDRB_Scribd100% (4)
- DecimalDocument15 pagesDecimalLIND'71No ratings yet
- 4 - Design of Bitumen MixesDocument25 pages4 - Design of Bitumen MixesKwasi Agyeman-Boakye100% (2)
- AttachmentDocument285 pagesAttachmentAman jaiNo ratings yet
- Wallach Zoomscope User ManualDocument24 pagesWallach Zoomscope User ManualEnmanuelSuárezNo ratings yet
- A3.32-CIRED - Final Report-Compressed PDFDocument215 pagesA3.32-CIRED - Final Report-Compressed PDFRobbyRobbyNo ratings yet
- Types of Beamforming: Adaptive AntennasDocument33 pagesTypes of Beamforming: Adaptive AntennasHarryNo ratings yet
- HarconenDocument21 pagesHarconenUnu AcoloNo ratings yet
- STAAD Rayleigh FrequencyDocument3 pagesSTAAD Rayleigh FrequencyKasim PolatNo ratings yet
- FMDS0289 Pipe Friction LossDocument64 pagesFMDS0289 Pipe Friction Lossdaniela hritucNo ratings yet
- Resistance To Unsnapping of Snap Fasteners: Standard Test Method ForDocument4 pagesResistance To Unsnapping of Snap Fasteners: Standard Test Method Forajay nigamNo ratings yet
- EEE 439 Communication Systems IIDocument35 pagesEEE 439 Communication Systems IIAurongo NasirNo ratings yet