HEV V-Elph 2
HEV V-Elph 2
Download as pdf or txt
You might also like
- Manual Mercedes Viano w639Document328 pagesManual Mercedes Viano w639Artur Catanoi50% (4)
- Load ChartDocument4 pagesLoad ChartVishnu Menon100% (6)
- FC 4500 Series-123 PDFDocument764 pagesFC 4500 Series-123 PDFJose Gerardo Valencia C100% (3)
- Msi30d 547041PDDocument470 pagesMsi30d 547041PDJose Pereira100% (1)
- Pamvec 1Document15 pagesPamvec 1api-3709675No ratings yet
- Pamvec 1Document15 pagesPamvec 1api-3709675No ratings yet
- Pamvec 1Document15 pagesPamvec 1api-3709675No ratings yet
- Pamvec 1Document15 pagesPamvec 1api-3709675No ratings yet
- LuK 0025 - Instructions For Fitting LuK Clutch DiscsDocument1 pageLuK 0025 - Instructions For Fitting LuK Clutch DiscsTURCEAC IOAN-DUMITRUNo ratings yet
- Innovation Landscape brief: Electric-vehicle smart chargingFrom EverandInnovation Landscape brief: Electric-vehicle smart chargingNo ratings yet
- BMW E46 m3 mz3 mz4 s54 V66lve AdjustmentDocument3 pagesBMW E46 m3 mz3 mz4 s54 V66lve AdjustmentEngine Tuning UpNo ratings yet
- Denso Common Rail Injector Test Data PDFDocument28 pagesDenso Common Rail Injector Test Data PDFFernando SanchezNo ratings yet
- Common Rail Direct Injection-UbrizgavanjeDocument60 pagesCommon Rail Direct Injection-UbrizgavanjeMarijan100% (1)
- Brake Control System: SectionDocument305 pagesBrake Control System: SectionАндрей НадточийNo ratings yet
- D65e P-12Document10 pagesD65e P-12Raphael Ruiz Ramos100% (1)
- Modeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2Document5 pagesModeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2Suresh100% (1)
- Eleves: A New Software Tool For Electric Vehicle Modeling and SimulationDocument8 pagesEleves: A New Software Tool For Electric Vehicle Modeling and Simulationakhil nigamNo ratings yet
- Modelling of Electric Vehicles Using MatlabDocument10 pagesModelling of Electric Vehicles Using MatlabHiếu Hoàng TrungNo ratings yet
- 48V ModelDocument15 pages48V Modelmihai_1957No ratings yet
- Modelling and Simulation of Electric and Hybrid Electric VehiclesDocument6 pagesModelling and Simulation of Electric and Hybrid Electric VehiclesYaz BentancourNo ratings yet
- Series-Parallel Hybrid Electric Vehicle Parameter Analysis Using MATLABDocument10 pagesSeries-Parallel Hybrid Electric Vehicle Parameter Analysis Using MATLABIJRASETPublicationsNo ratings yet
- E3sconf Icregcsd2023 01006Document12 pagesE3sconf Icregcsd2023 01006kanchanmshinde2000No ratings yet
- EV ModelDocument18 pagesEV ModelAbdellah DahouNo ratings yet
- Overview of Electric Vehicle Concept and Power Management StrategiesDocument9 pagesOverview of Electric Vehicle Concept and Power Management StrategiesMinh Thái LêNo ratings yet
- Development of Control Strategy Based On Fuzzy Logic Control For A Parallel Hybrid VehicleDocument5 pagesDevelopment of Control Strategy Based On Fuzzy Logic Control For A Parallel Hybrid VehicleAmit PanchalNo ratings yet
- Modeling, Validation and Simulation of Electric Vehicles Using MATLABDocument11 pagesModeling, Validation and Simulation of Electric Vehicles Using MATLABAli aliNo ratings yet
- Design and Assessment of Elrctic Vehicle PowertrainDocument10 pagesDesign and Assessment of Elrctic Vehicle Powertrainhcsjai1995No ratings yet
- Electric Vehicle Energy Consumption ModellingDocument20 pagesElectric Vehicle Energy Consumption ModellingRohanNo ratings yet
- File 016Document31 pagesFile 016Bang RegarNo ratings yet
- TOPOLOGIAS Topological Overview of Hybrid Electric and Fuel Cell Vehicular Power System Architectures and ConfigurationsDocument8 pagesTOPOLOGIAS Topological Overview of Hybrid Electric and Fuel Cell Vehicular Power System Architectures and ConfigurationsAngel SilvaNo ratings yet
- V 81 N 183 A 10Document11 pagesV 81 N 183 A 10Sergio M. WerleNo ratings yet
- Modeling and Simulation of EV HEV PDFDocument17 pagesModeling and Simulation of EV HEV PDFshawn liNo ratings yet
- Intl J of Energy Research - 2020 - Miri - Electric Vehicle Energy Consumption Modelling and Estimation A Case StudyDocument20 pagesIntl J of Energy Research - 2020 - Miri - Electric Vehicle Energy Consumption Modelling and Estimation A Case StudyhutkuosliNo ratings yet
- Transportation Research Part D: Konstantinos N. Genikomsakis, Georgios MitrentsisDocument21 pagesTransportation Research Part D: Konstantinos N. Genikomsakis, Georgios MitrentsisEdwin SilvaNo ratings yet
- 2008-01-0085 - Model - Based - Design - HEV - Final - 1 10 08 PDFDocument10 pages2008-01-0085 - Model - Based - Design - HEV - Final - 1 10 08 PDFrathorsumit2006No ratings yet
- Battery Design Innovation: It's All About The Mathematics: Paul Goossens, VP, Applications Engineering, MaplesoftDocument6 pagesBattery Design Innovation: It's All About The Mathematics: Paul Goossens, VP, Applications Engineering, Maplesoftjpana3467No ratings yet
- DD2Document18 pagesDD2wandjidelors14No ratings yet
- Energies: High Performance Electric Vehicle Powertrain Modeling, Simulation and ValidationDocument22 pagesEnergies: High Performance Electric Vehicle Powertrain Modeling, Simulation and ValidationMayur DeokarNo ratings yet
- Guest Editorial Special Section On Vehicle Power and PropulsionsDocument3 pagesGuest Editorial Special Section On Vehicle Power and PropulsionsvishiwizardNo ratings yet
- Development and Use of A Regenerative Braking Model For A Parallel Hybrid Electric VehicleDocument14 pagesDevelopment and Use of A Regenerative Braking Model For A Parallel Hybrid Electric VehicleAnirudh NandakumarNo ratings yet
- A Comparative Study of Simulation Results Between PHERB, ADVISOR and AUTONOMIE ModelsDocument11 pagesA Comparative Study of Simulation Results Between PHERB, ADVISOR and AUTONOMIE ModelsInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- Energy Management Strategies For Modern Electric Vehicles Using MATLAB SimulinkDocument8 pagesEnergy Management Strategies For Modern Electric Vehicles Using MATLAB SimulinkAli aliNo ratings yet
- IEEE MVC 2023 Final 20221125 CopyrightAcceptedDocument9 pagesIEEE MVC 2023 Final 20221125 CopyrightAcceptedagu bucciarelliNo ratings yet
- Fuzzy 20 Logic 20 Control 20 For 20 Parallel 20 Hybrid 20 VehiclesDocument10 pagesFuzzy 20 Logic 20 Control 20 For 20 Parallel 20 Hybrid 20 VehiclesSmokeysGarageNo ratings yet
- Sname JSR 2020 64 2 171 PDFDocument14 pagesSname JSR 2020 64 2 171 PDFGabriel EduardoNo ratings yet
- Basics of Electric Vehicle Technology and A DesignDocument6 pagesBasics of Electric Vehicle Technology and A DesignCarlos HT Tmberto Tranamil BarrosNo ratings yet
- Light Electric Vehicle Powertrain: Modeling, Simulation, and Experimentation For Engineering Students Using PSIMDocument14 pagesLight Electric Vehicle Powertrain: Modeling, Simulation, and Experimentation For Engineering Students Using PSIMsuneelnitrNo ratings yet
- Development of An Optimal Power-Distribution-Management Algorithm For Four-Wheel-Drive Electric VehiclesDocument11 pagesDevelopment of An Optimal Power-Distribution-Management Algorithm For Four-Wheel-Drive Electric VehiclessammyNo ratings yet
- Drive Train Design and Modeling of A Parallel Diesel Hybrid Electric Bus Based On AVL/CruiseDocument7 pagesDrive Train Design and Modeling of A Parallel Diesel Hybrid Electric Bus Based On AVL/CruisewahonotNo ratings yet
- Sliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric VehiclesDocument12 pagesSliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric Vehicles시드세흐리아르알리나크비No ratings yet
- Model Based System Design For Electric Vehicle ConDocument19 pagesModel Based System Design For Electric Vehicle ConAmanuelAlemaNo ratings yet
- Study and Analysis of Nonlinear Constrained Components A Study of Plug-In Hybrid Electric VehicleDocument4 pagesStudy and Analysis of Nonlinear Constrained Components A Study of Plug-In Hybrid Electric VehicleEditor IJTSRDNo ratings yet
- Overview On Energy Management Strategies For Electric Vehicles - Modelling, Trends and Research PerspectivesDocument8 pagesOverview On Energy Management Strategies For Electric Vehicles - Modelling, Trends and Research PerspectivesDr. Shaker Mahmood KhudherNo ratings yet
- Text Book For Unit 5 Evsimulation InfrastructureDocument44 pagesText Book For Unit 5 Evsimulation InfrastructureDhanush KNo ratings yet
- Pihef - Plug-In Hybrid Electric Factor PDFDocument6 pagesPihef - Plug-In Hybrid Electric Factor PDFgaganmeena1994No ratings yet
- Optimal Sizing and Sitting of Electric Vehicle Charging Station by Using Archimedes Optimization Algorithm TechniqueDocument13 pagesOptimal Sizing and Sitting of Electric Vehicle Charging Station by Using Archimedes Optimization Algorithm TechniqueInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- An Accessible Pre-Design Calculation Tool To Support The Definition of EV ComponentsDocument13 pagesAn Accessible Pre-Design Calculation Tool To Support The Definition of EV ComponentsMangesh YadavNo ratings yet
- Specifications and Design of A PM Electric Variable Transmission For Toyota Prius IIDocument9 pagesSpecifications and Design of A PM Electric Variable Transmission For Toyota Prius IIIvan VillanevaNo ratings yet
- An EV - Simulator For Electric Vehicle EducationDocument7 pagesAn EV - Simulator For Electric Vehicle EducationNarendra YadavNo ratings yet
- Maplesoft ISKO Designing HEVs Using OptimizationstrategiesDocument17 pagesMaplesoft ISKO Designing HEVs Using Optimizationstrategiesfaizshaikh101101No ratings yet
- Developing A Model For Analysis of The Cooling Loads of A Hybrid Electric Vehicle by Using Co-Simulations of Verified SubmodelsDocument19 pagesDeveloping A Model For Analysis of The Cooling Loads of A Hybrid Electric Vehicle by Using Co-Simulations of Verified Submodelstripathi prashantNo ratings yet
- Design and Development of The Hybrid-Electric Vehicle by Achieving The Best Operating Performance and Highest EfficiencyDocument7 pagesDesign and Development of The Hybrid-Electric Vehicle by Achieving The Best Operating Performance and Highest EfficiencyДрагана КрстевскаNo ratings yet
- HybridBattery SupercapacitorDocument10 pagesHybridBattery SupercapacitorshyamNo ratings yet
- Applied Energy: Chiara Fiori, Kyoungho Ahn, Hesham A. RakhaDocument12 pagesApplied Energy: Chiara Fiori, Kyoungho Ahn, Hesham A. RakhaJosé GonzálezNo ratings yet
- EGY D 22 08956 - R1 - ReviewerDocument72 pagesEGY D 22 08956 - R1 - ReviewerWEIWEI YANGNo ratings yet
- Comparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric VehicleDocument6 pagesComparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric Vehiclejin11004No ratings yet
- An Optimization Approach To Hybrid Electric Propulsion System DesignDocument22 pagesAn Optimization Approach To Hybrid Electric Propulsion System DesignDanny LiNo ratings yet
- Intelligent Energy Management in Hybrid Electric VehiclesDocument32 pagesIntelligent Energy Management in Hybrid Electric VehiclesMuhammad RehanNo ratings yet
- Electric Vehicles QBDocument13 pagesElectric Vehicles QBSiddhuNo ratings yet
- Mic 2021 4 1 PDFDocument16 pagesMic 2021 4 1 PDFAnna TupitsinaNo ratings yet
- Propulsion System Design of Electric and Hybrid Vehicles: Mehrdad Ehsani, Khwaja M. Rahman, and Hamid A. ToliyatDocument9 pagesPropulsion System Design of Electric and Hybrid Vehicles: Mehrdad Ehsani, Khwaja M. Rahman, and Hamid A. ToliyatGabriel de SáNo ratings yet
- Vehicles 06 00023Document30 pagesVehicles 06 00023vikram29586No ratings yet
- Introduction to Hybrid Vehicle System Modeling and ControlFrom EverandIntroduction to Hybrid Vehicle System Modeling and ControlRating: 4 out of 5 stars4/5 (1)
- Microsoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideFrom EverandMicrosoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideNo ratings yet
- Per EmcDocument802 pagesPer Emcapi-3709675No ratings yet
- ProceedDocument162 pagesProceedapi-3709675100% (8)
- PhilippinesDocument56 pagesPhilippinesapi-37096750% (2)
- Pamvec PHD - Thesis EditadoDocument281 pagesPamvec PHD - Thesis Editadoapi-3709675100% (1)
- PRR 2005 01Document123 pagesPRR 2005 01api-3709675No ratings yet
- Metallic Bipolar Plates For PEM Fuel Cells 02Document5 pagesMetallic Bipolar Plates For PEM Fuel Cells 02api-3709675No ratings yet
- Hybrid CarsDocument14 pagesHybrid Carsapi-3709675No ratings yet
- Hondacivic ArDocument2 pagesHondacivic Arapi-3709675No ratings yet
- Development, Design, and Performance of A PEMFC System 06Document41 pagesDevelopment, Design, and Performance of A PEMFC System 06api-3709675No ratings yet
- 1 10 02peterlilienthalDocument31 pages1 10 02peterlilienthalapi-3709675No ratings yet
- 03 JohannBergmairDocument38 pages03 JohannBergmairapi-3709675No ratings yet
- HOMER Thesis 2Document82 pagesHOMER Thesis 2api-3709675100% (1)
- 060-1 Instrument ClusterDocument17 pages060-1 Instrument ClusterÁkos LengyelNo ratings yet
- Deutz 2012 Operation ManualDocument86 pagesDeutz 2012 Operation ManualGeorg Errapart100% (5)
- Driver'S: 9700 Walk-AroundDocument64 pagesDriver'S: 9700 Walk-Aroundlars skjevikNo ratings yet
- 2018 BAJA SAE Technical Inspection Sheet: SchoolDocument12 pages2018 BAJA SAE Technical Inspection Sheet: SchoolSai Krishna SKNo ratings yet
- DB58 Inject Pump ReplaceDocument7 pagesDB58 Inject Pump Replacevarthot100% (1)
- Radon ZR Race 29er 6Document3 pagesRadon ZR Race 29er 6macfiaNo ratings yet
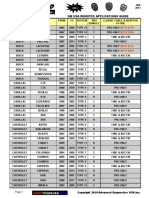
- GM Usa Remotes Applications Guide: BETA 8.73 BETA 9.04Document4 pagesGM Usa Remotes Applications Guide: BETA 8.73 BETA 9.04carlosautoelectronicaNo ratings yet
- Momo Service: Kategori SemuaDocument8 pagesMomo Service: Kategori SemuaSMK NEGERI 1 KEBUN TEBUNo ratings yet
- Form Pti & BBS AsliDocument2 pagesForm Pti & BBS AsliYogi HusniNo ratings yet
- enDocument55 pagesenRegistr Registr100% (2)
- X Series CompleteDocument16 pagesX Series CompleteJaime MurilloNo ratings yet
- C20R Optimized Start Technique For C20 and C20RDocument4 pagesC20R Optimized Start Technique For C20 and C20REstevamNo ratings yet
- KC70 enDocument4 pagesKC70 enCesarGomesNo ratings yet
- CQD15L: - Electric Reach Truck Stand-Up TypeDocument2 pagesCQD15L: - Electric Reach Truck Stand-Up TypeTRINDADENo ratings yet
- MLT630, MLT634, MLT731, MT732Rev 11-04Document1,038 pagesMLT630, MLT634, MLT731, MT732Rev 11-04Rimas Pečiukėnas100% (1)
- Xuv300 01Document1 pageXuv300 01EmememNo ratings yet
- L136 Marine Engine: Model Conditions Power RPM Base Engine L136 Heavy Duty 160PS (118kW) 2200 D1146Document2 pagesL136 Marine Engine: Model Conditions Power RPM Base Engine L136 Heavy Duty 160PS (118kW) 2200 D1146RaymondNo ratings yet
- ME-GI Engine Fuelled by LNG - tcm144-473665Document25 pagesME-GI Engine Fuelled by LNG - tcm144-473665Muhammad Ikhwan KurniawanNo ratings yet
- Honda Jazz 1.3 Vtec ChainDocument8 pagesHonda Jazz 1.3 Vtec ChainMshiboniumNo ratings yet
- Serie 391 H16-20 BROCHUREDocument8 pagesSerie 391 H16-20 BROCHUREOlvil MovilNo ratings yet