PID Controller
PID Controller
Download as docx, pdf, or txt
You might also like
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Cable TutorialDocument22 pagesCable TutorialRodriguez Villalobos Nelson100% (4)
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enpetergoodingNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enhiperboreoatlantecNo ratings yet
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- PID ControlDocument11 pagesPID Controlhd03No ratings yet
- PID Theory Explained, Komplett PDFDocument5 pagesPID Theory Explained, Komplett PDFThierry BaudorreNo ratings yet
- How To Manually Tune A Three-Mode PID ControllerDocument5 pagesHow To Manually Tune A Three-Mode PID ControllerlorenzoNo ratings yet
- PID Controller: Navigation SearchDocument8 pagesPID Controller: Navigation SearchprashantshivanagiNo ratings yet
- Ic 2003Document21 pagesIc 2003Dinesh KumarNo ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- Control Design - How To Tune LoopsDocument34 pagesControl Design - How To Tune LoopsBossNo ratings yet
- PID ControllersDocument58 pagesPID Controllerss12originalNo ratings yet
- Mechatronics (1) .34 9Document57 pagesMechatronics (1) .34 9Anonymous p8bHAAxNo ratings yet
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- PID PrincipleDocument44 pagesPID PrincipleSudhir ShindeNo ratings yet
- White Paper PID Control in Vacuum Systems - Final 2020Document4 pagesWhite Paper PID Control in Vacuum Systems - Final 2020giselleNo ratings yet
- Report On Pid ControllerDocument14 pagesReport On Pid Controllersura samirNo ratings yet
- Examining The Fundamentals of PID ControlDocument7 pagesExamining The Fundamentals of PID ControlbariNo ratings yet
- PID Controller: From Wikipedia, The Free EncyclopediaDocument17 pagesPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- PID ControllerDocument18 pagesPID ControllerCheng Khie Chieh100% (1)
- Basic TheoryDocument5 pagesBasic TheoryzakiNo ratings yet
- Tuning PID ControllersDocument3 pagesTuning PID ControllersSatsih KumarNo ratings yet
- PID ControllerDocument17 pagesPID Controlleradetag0% (1)
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiNo ratings yet
- Tuning of PID Controller: What Is A PID Control?Document4 pagesTuning of PID Controller: What Is A PID Control?Mohammad HussnainNo ratings yet
- Introduction To The Key Terms Associated With PID Temperature ControlDocument8 pagesIntroduction To The Key Terms Associated With PID Temperature ControlBộ Môn DieuKhienhoc100% (1)
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNo ratings yet
- Pid Limitations & Application by PrincessDocument24 pagesPid Limitations & Application by PrincessPrincess CutabNo ratings yet
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- Lapres P4Document19 pagesLapres P4zakiNo ratings yet
- In Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ADocument4 pagesIn Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ACollim Hajime NivaledNo ratings yet
- CD1607 HowtoTuneLoops 4Document34 pagesCD1607 HowtoTuneLoops 4NCNo ratings yet
- Apc Term PaperDocument9 pagesApc Term PaperDarshan MalaniNo ratings yet
- PidDocument21 pagesPidSandesh Kumar B VNo ratings yet
- What Is A PID ControllerDocument11 pagesWhat Is A PID ControllerANRG Batch 11No ratings yet
- PID Theory ExplainedDocument9 pagesPID Theory ExplainedMansen NsubugaNo ratings yet
- Control SystemDocument7 pagesControl SystemLeo LonardelliNo ratings yet
- Auto1 Kupe6 Co2 Resurreccion DefinitionsDocument4 pagesAuto1 Kupe6 Co2 Resurreccion DefinitionsaltheiaarabeeeNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- Temperature Control LabDocument16 pagesTemperature Control Labhoocheeleong234100% (1)
- Control System - المنهج المقرر PDFDocument122 pagesControl System - المنهج المقرر PDFTariq Zeyad100% (1)
- Tuning A PID Controller: Guillermo J. CostaDocument6 pagesTuning A PID Controller: Guillermo J. CostaDeepak RainaNo ratings yet
- Pid ControllerDocument20 pagesPid ControllerHarshal InamdarNo ratings yet
- Temp Control Che LabDocument10 pagesTemp Control Che LabStephanie SomongcadNo ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- PID Controller: Control Loop BasicsDocument6 pagesPID Controller: Control Loop Basicsdil17No ratings yet
- History of Control SystemDocument11 pagesHistory of Control Systemarvinlorenz100% (2)
- IPCDocument15 pagesIPCu can't see meNo ratings yet
- Close Loop Control Sys IntroDocument7 pagesClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- Automatización 4ta Clase, Tipos de Opciones de ControlDocument6 pagesAutomatización 4ta Clase, Tipos de Opciones de Controlivandario17-1No ratings yet
- Microcontroller - PID ControlDocument10 pagesMicrocontroller - PID Controlfrancistaura451No ratings yet
- Introduction To PID ControlDocument6 pagesIntroduction To PID ControlIonescu ViorelNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- Inorganic Chapter6 PDFDocument31 pagesInorganic Chapter6 PDFFlorinda BautistaNo ratings yet
- Microprocessors & Its Applications CSM-3305 PDFDocument255 pagesMicroprocessors & Its Applications CSM-3305 PDFromesh1998No ratings yet
- Enclosure Legend: Swing Frame Front ViewDocument1 pageEnclosure Legend: Swing Frame Front ViewGeng ShenNo ratings yet
- ATI Delta FT SensorDocument2 pagesATI Delta FT SensorwhacklezzNo ratings yet
- Ionosferic Radio Propagation - ArticleDocument111 pagesIonosferic Radio Propagation - ArticleEddy Vino100% (1)
- Trial ExamDocument14 pagesTrial ExamSudipto DeNo ratings yet
- Ghost of 29 Megacycles (Z-Lib - Io)Document380 pagesGhost of 29 Megacycles (Z-Lib - Io)Marlin Pohlman100% (1)
- Data Sheet: Pro Eco 120W 24V 5ADocument5 pagesData Sheet: Pro Eco 120W 24V 5ACường NguyễnNo ratings yet
- Deep Sea Electronics: Dsea106 Mkii Installation InstructionsDocument2 pagesDeep Sea Electronics: Dsea106 Mkii Installation InstructionsThiago MartinsNo ratings yet
- (Q) Discuss in Detail Working Principle of Chemical SensorsDocument9 pages(Q) Discuss in Detail Working Principle of Chemical SensorsShalan KosékarNo ratings yet
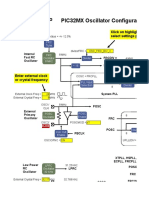
- Pic32 Osc Config v1.1Document45 pagesPic32 Osc Config v1.1harikrishna242424No ratings yet
- A Comparative Study On 4G and 5G Technology For Wireless ApplicationsDocument6 pagesA Comparative Study On 4G and 5G Technology For Wireless ApplicationsIOSRjournalNo ratings yet
- 3.3 IV Characteristics of PN Junction Diode-ModifiedDocument18 pages3.3 IV Characteristics of PN Junction Diode-Modifiedraunak guptaNo ratings yet
- Easy UPS 3S - E3SUPS30KHBDocument3 pagesEasy UPS 3S - E3SUPS30KHBsamuel yigaNo ratings yet
- The E-Bomb - A Weapon of Electrical Mass Destruction: by SantoshDocument34 pagesThe E-Bomb - A Weapon of Electrical Mass Destruction: by Santoshshabana90No ratings yet
- Near Threshold Computing Overcoming Performance deDocument7 pagesNear Threshold Computing Overcoming Performance deAtul YadavNo ratings yet
- Build Your Own Magneto TimerDocument1 pageBuild Your Own Magneto TimerCTN2010No ratings yet
- Social Networking Database DesignDocument21 pagesSocial Networking Database DesignVinod KumarNo ratings yet
- PPTDocument43 pagesPPTHamedRaza100% (2)
- Karel The Robot Lessonplan Hoc 2018 2Document14 pagesKarel The Robot Lessonplan Hoc 2018 2api-403239632No ratings yet
- 21 & 22 Fluke VT MobileDocument2 pages21 & 22 Fluke VT MobilerayNo ratings yet
- WD 330 SDocument4 pagesWD 330 SET EskyuNo ratings yet
- Exp 4Document5 pagesExp 4heyejay293No ratings yet
- Product Data Sheet: Circuit Breaker Compact NSX630N, 50 Ka at 415 VAC, Micrologic 2.3 M Trip Unit 500 A, 3 Poles 3dDocument3 pagesProduct Data Sheet: Circuit Breaker Compact NSX630N, 50 Ka at 415 VAC, Micrologic 2.3 M Trip Unit 500 A, 3 Poles 3dgusmilexaNo ratings yet
- 300 628 Dayton Audio Sub 1000 User ManualDocument4 pages300 628 Dayton Audio Sub 1000 User ManualJD MedinaNo ratings yet
- ER V Plus Manual 100016Document144 pagesER V Plus Manual 100016Carlos André GiafferiNo ratings yet
- Solis Datasheet Solis-80K-5GDocument2 pagesSolis Datasheet Solis-80K-5GAlexander ZulqarnainNo ratings yet
- HolaaaaDocument4 pagesHolaaaaLuis RodriguezNo ratings yet
- Sualaptop365.edu - VN: PS2 Function Board Block DiagramDocument8 pagesSualaptop365.edu - VN: PS2 Function Board Block DiagramLeonardo DiegoNo ratings yet