What Is A PID Controller
What Is A PID Controller
Download as docx, pdf, or txt
You might also like
- Manual Variador Yx 3000 (FP) PDFDocument160 pagesManual Variador Yx 3000 (FP) PDFJorge Betancur80% (5)
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanNo ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- PID ControllerDocument16 pagesPID ControllerDevarya ChhibberNo ratings yet
- PID ControllerDocument5 pagesPID ControllerAbhilash MallikarjunaNo ratings yet
- PlssDocument21 pagesPlssKrishi ChhedaNo ratings yet
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- PID ControlDocument32 pagesPID ControlSyamil RahmanNo ratings yet
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- PID PrincipleDocument44 pagesPID PrincipleSudhir ShindeNo ratings yet
- Special Nonlinear Pid ControllersDocument25 pagesSpecial Nonlinear Pid ControllersawalmeidaNo ratings yet
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesNo ratings yet
- Design and Simulation of DA Based PID Controller Using Verilog CodingDocument6 pagesDesign and Simulation of DA Based PID Controller Using Verilog Codingjamal2877No ratings yet
- History PID Controller For DummiesDocument8 pagesHistory PID Controller For DummiesDouglasNo ratings yet
- App PIDDocument12 pagesApp PIDP Praveen KumarNo ratings yet
- PID ControllerDocument7 pagesPID ControllerPromise EnyinnayaNo ratings yet
- PID Control of Mechanical System Using Suitable Simulation SoftwareDocument12 pagesPID Control of Mechanical System Using Suitable Simulation Softwareanagha joshiNo ratings yet
- PID Lab HandoutDocument16 pagesPID Lab HandoutsteedNo ratings yet
- Basic Understanding of PID ControllersDocument9 pagesBasic Understanding of PID ControllersNimesh GunasekeraNo ratings yet
- Module 10 - Loop TuningDocument41 pagesModule 10 - Loop TuningHtet LwinNo ratings yet
- PID Controller: From Wikipedia, The Free EncyclopediaDocument17 pagesPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlNo ratings yet
- PID Controllers Explained - Control NotesDocument9 pagesPID Controllers Explained - Control NotesSPK 27No ratings yet
- Introduction To PID ControlDocument6 pagesIntroduction To PID ControlIonescu ViorelNo ratings yet
- Temp Control Che LabDocument10 pagesTemp Control Che LabStephanie SomongcadNo ratings yet
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Document18 pagesPID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNo ratings yet
- PID ControllerDocument17 pagesPID Controlleradetag0% (1)
- PID ControllerDocument18 pagesPID ControllerCheng Khie Chieh100% (1)
- Pid Feature ProfileDocument12 pagesPid Feature ProfilePrasanna RamanathanNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- Chapter Four 4.1 Controller (Selection, Tuning and Maintenance) A Proportional-Integral-Derivative ControllerDocument6 pagesChapter Four 4.1 Controller (Selection, Tuning and Maintenance) A Proportional-Integral-Derivative ControllerchdiNo ratings yet
- Chapter 4 - PID ControllerDocument62 pagesChapter 4 - PID ControllerHuy Nguyen LuongNo ratings yet
- PCD ProjectDocument3 pagesPCD ProjectSasmilah KandsamyNo ratings yet
- CST Cheats 2Document1 pageCST Cheats 2Harsh PatelNo ratings yet
- Apc Term PaperDocument9 pagesApc Term PaperDarshan MalaniNo ratings yet
- Technical Reference - Tuning A PID ControllerDocument6 pagesTechnical Reference - Tuning A PID ControllerMelchor VasquezNo ratings yet
- Pid Control and Communication in Siemens PLCDocument50 pagesPid Control and Communication in Siemens PLCCesar BarrosNo ratings yet
- PID in Siemens PLCDocument50 pagesPID in Siemens PLCabdulahadkhan165No ratings yet
- In Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ADocument4 pagesIn Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ACollim Hajime NivaledNo ratings yet
- PIDControlDocument2 pagesPIDControlchatty8567% (3)
- Mechatronics Assignment - 1Document6 pagesMechatronics Assignment - 1SARTHAK JAINNo ratings yet
- A Design of A PID Self-Tuning Controller Using PDFDocument11 pagesA Design of A PID Self-Tuning Controller Using PDFDaniel SanchezNo ratings yet
- Controllers P Controller:: Fig 1. Temperature-Time Table of A Proportional Controller and Average Case Error StatusDocument2 pagesControllers P Controller:: Fig 1. Temperature-Time Table of A Proportional Controller and Average Case Error StatusBerkcan ArslanNo ratings yet
- Tuning of PID Controller: What Is A PID Control?Document4 pagesTuning of PID Controller: What Is A PID Control?Mohammad HussnainNo ratings yet
- Controls YsDocument17 pagesControls Ysbamboo shackNo ratings yet
- Subject: Experiment #5 PID Controller. Done By: Abdallah Husain Sulieman Daldoom. 31502020130. Eng. Saleem GhanayemDocument6 pagesSubject: Experiment #5 PID Controller. Done By: Abdallah Husain Sulieman Daldoom. 31502020130. Eng. Saleem GhanayemAbdallah DaldoomNo ratings yet
- Basics of Pid ControllerDocument3 pagesBasics of Pid ControllerMuralidharan NRNo ratings yet
- Unit 3 PLC PDFDocument15 pagesUnit 3 PLC PDFMahesh ShendeNo ratings yet
- Auto1 Kupe6 Co2 Resurreccion DefinitionsDocument4 pagesAuto1 Kupe6 Co2 Resurreccion DefinitionsaltheiaarabeeeNo ratings yet
- Ingenieria de ControlesDocument91 pagesIngenieria de ControlesJulio César Millán BarcoNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
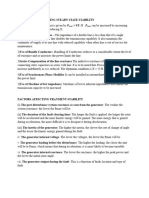
- Methods of Improving Transient StabilityDocument2 pagesMethods of Improving Transient StabilityNicholasNo ratings yet
- 96X96 Mems 3D Matrix Optical Switch: FeaturesDocument2 pages96X96 Mems 3D Matrix Optical Switch: FeaturesKlaudio MarkoNo ratings yet
- APECDocument6 pagesAPECVIVEK SAININo ratings yet
- Inkjet Printhead Characteristics Application RequirementsDocument50 pagesInkjet Printhead Characteristics Application RequirementsArie Teckno100% (2)
- CSE Syllabus Comilla University 08090910Document25 pagesCSE Syllabus Comilla University 08090910me homer100% (1)
- Ams Lec 03 Simulator v01Document90 pagesAms Lec 03 Simulator v01Ahmed AtefNo ratings yet
- Logic Family ReportDocument2 pagesLogic Family ReportSoma SinhaNo ratings yet
- Battery Charger - 15V - 5A Current ControlledDocument6 pagesBattery Charger - 15V - 5A Current Controlledilesh shahNo ratings yet
- Tpcag2 CCDocument52 pagesTpcag2 CCRamulu VeesamNo ratings yet
- 2850 256 Sample Questions v1 0 PDFDocument7 pages2850 256 Sample Questions v1 0 PDFDavid Blake0% (1)
- Catalogue 2 PDFDocument24 pagesCatalogue 2 PDFgokulmech21No ratings yet
- HW 316953Document3 pagesHW 316953carlosconstructor1No ratings yet
- Date: Expt. No: 03 Name of The Experiment: No-Load Characteristics (E Aim of The ExperimentDocument4 pagesDate: Expt. No: 03 Name of The Experiment: No-Load Characteristics (E Aim of The Experiment23 - 017 - Md. Imran HossainNo ratings yet
- Paper - 3 Set ADocument7 pagesPaper - 3 Set Afakir mohammadNo ratings yet
- Hazard Notice: Hewlett Packard Codemaster XL+, XL and Xe Defibrillator/Monitors: Potential Power Supply FailureDocument2 pagesHazard Notice: Hewlett Packard Codemaster XL+, XL and Xe Defibrillator/Monitors: Potential Power Supply FailurematiasNo ratings yet
- ADF-60A Automatic Direction Finder: Key Owner / User BenefitsDocument3 pagesADF-60A Automatic Direction Finder: Key Owner / User BenefitsHiroKo100% (1)
- Manual Samsung LN40A550P3FDocument24 pagesManual Samsung LN40A550P3FArmando GarciaNo ratings yet
- Igzo ThesisDocument8 pagesIgzo Thesisdnr68wp2100% (2)
- QaecDocument70 pagesQaecReethika ChitithotiNo ratings yet
- Instruction Manual DLV30A 45A 70A-SP (AJ) SPC (AJ) EnglishDocument23 pagesInstruction Manual DLV30A 45A 70A-SP (AJ) SPC (AJ) EnglishVinhNo ratings yet
- DPM Series: Easy To Install and Use, High in Accuracy and Alerts To ActDocument4 pagesDPM Series: Easy To Install and Use, High in Accuracy and Alerts To ActTeguh WaluyoNo ratings yet
- Lead Free CH3NH3SnI3 Perovskite Thin-Film With P-Type Semiconducting Nature andDocument24 pagesLead Free CH3NH3SnI3 Perovskite Thin-Film With P-Type Semiconducting Nature andlia nuNo ratings yet
- Report - Smart Irrigation SystemDocument32 pagesReport - Smart Irrigation SystemKani mozhiNo ratings yet
- Mwo Mmic BrochureDocument4 pagesMwo Mmic BrochureAWR CorporationNo ratings yet
- EPsolar Product CatalogueDocument29 pagesEPsolar Product CatalogueilhamNo ratings yet
- Infineon IKZA50N65RH5 DataSheet v02 01 enDocument15 pagesInfineon IKZA50N65RH5 DataSheet v02 01 ennithinmundackal3623No ratings yet
- Parallel GeneratorsDocument81 pagesParallel GeneratorsSudhir JoshiNo ratings yet
- 0 - RESUMEX - Copy - Copy - 27-Dec-18 - 13.49.33Document4 pages0 - RESUMEX - Copy - Copy - 27-Dec-18 - 13.49.33arun vadivelNo ratings yet
- Specifications: Application Specification Metric EnglishDocument58 pagesSpecifications: Application Specification Metric EnglishBaltazar DiazNo ratings yet