
Simulation and Laboratory Model of Small Hydropowe
Uploaded by
mhakimov1996Simulation and Laboratory Model of Small Hydropowe
Uploaded by
mhakimov199612 Acta Electrotechnica et Informatica, Vol. 22, No. 4, 2022, 12–17, DOI: 10.
2478/aei-2022-0017
SIMULATION AND LABORATORY MODEL OF SMALL HYDROPOWER PLANT
Richard OLEXA, Pavol FEDOR
Department of Electrical Engineering and Mechatronics, Faculty of Electrical Engineering and Informatics,
Technical University of Košice, Letná 9, 042 00 Košice, Slovak Republic, Tel. +421 55 602 2694, E-mail: richard.olexa@tuke.sk
ABSTRACT
This paper is dedicated to the description of all our research done so far in the field of simulation of small hydropower plants as
well as in creating a functional laboratory model based on the proposed simulation models. Comparing to the common structures, we
propose some different approaches in modelling parts of the small hydropower plants, e.g. fuzzy model of the hydraulic turbine
efficiency. Moreover, this simulation model is created directly for the small hydropower plants, thus it simplifies parts, that are
commonly used in other scientific papers and simulate the phenomenon connected to the big scale hydropower plants structure and
physical description. As a necessary step in the process of creation of universal laboratory model of a small hydropower plant that
should be used for design and tuning purposes of new approaches of controlling such systems, we discuss the research and development
phase that led to the final construction of the depicted laboratory model.
Keywords: small hydropower plant, simulation model, asynchronous generator, laboratory model, MATLAB
1. INTRODUCTION process of conversion of the energy; as well as a block for
the Electric Generator and another one for the Grid. [1] The
At the moment, the pressure put on all of the countries, already-described scheme is depicted in the Fig. 1.
especially in the European union connected to the usage of
a renewable energy sources instead of fossil fuels and most
recently instead of natural gas as well, leads many
institutions and researchers to development of new, more
efficient and simple solutions in this field.
Not only this, but a long lasting common aim to be more
green or in other words, environmental friendly, was our
reason for starting this research at its very beginning, too.
Firstly, an overview of the currently available scientific
papers and work was done, i.e. defining a scale differences,
comparing proposed simulation schemes of small
hydropower plants, while adjusting these ideas to perform
as efficient as possible for our modelling purposes. The vast
majority of already-published papers describes modelling
and simulation of a large scale hydropower plants, thus,
Fig. 1 Block diagram of Small Hydropower Plant [2]
consists of some phenomenon, or its model respectively,
that are not needed to be incorporated in the model of a
In this model, there are all of the parameter normalized,
small hydropower plants, especially because of the missing
i.e. they reach the value between 0 and 1, or between 0 and
technological parts that cause them, e.g. water hammer
100% respectively. Moreover, as stated before, it is
phenomenon; surge tank subsystem; etc. [1]
possible to neglect all of the phenomenon characterized for
As mentioned, this paper is dedicated to the
a big scale hydropower plants for the purposes of our
investigation of small hydropower plants, with a unit rating
simulation, e.g. water hammer, travelling waves, etc.,
Power Generated PG between 100kW to 5GW; run-of-river
mainly due to the length of the penstock and the typical
type, or only with a small reservoir, while the proposed
height of the water head usually available at the SHP.
simulation model and new modelling approaches are being
applied. Moreover, the construction and the scheme
2.1. Turbine Control System – Governor
definition of a laboratory model of a small hydropower
plant for simulation, development and optimization
In general, Turbine Control System, or so called
purposes, was performed.
Governor serves in the scheme as a part performing two
main functions, i.e. running up the hydraulic turbine, thus
2. PROPOSED SIMULATION MODEL reaching the reference speed, taking the grid frequency and
the number of generator´s poles into account; and after
Generally, small hydropower plant (SHP) is simulated connecting to the grid, this sub-system aims to control the
using a model of five main sub-systems, i.e. the Governor power supplied by the SHP. In the Fig. 2, there is a well
– representing a turbine control system; the Servodrive, that described and common scheme depicted that Munoz-
serves as an actuator to regulate the flow of the water Hernandez wrote in more detail about [3], where KP - a
throughout the hydraulic turbine via controlling the valves, proportional gain; KI – an integral gain; KD – derivative
or guide vanes according to the Governor output signal; the gain; and α – a permanent droop, that serves to boost the
simulation model of a Hydraulic Turbine – representing the input signal of the controller coming from a power
ISSN 1335-8243 (print) ISSN 1338-3957 (online), www.aei.tuke.sk
Acta Electrotechnica et Informatica, Vol. 22, No. 4, 2022 13
controlling part of the scheme. Blocks of the Saturation turbine´s efficiency into account. First approach is so called
placed in the diagram serves as some kind of an alternative no load flow calculation method described in detail by the
to an anti-reset windup (ARW) protection. IEEE Working Group in 1992. [4] Another one is a direct
efficiency calculation method, presented by Acakpovi and
Essel [6]. Both of these ways were described and compared
in the paper [1]. While creating the proposed simulation
model of a SHP, we chose to use the first one, i.e. the no
load flow approach. Afterwards, we developed a fuzzy
model for better efficiency incorporation that is discussed
in detail in the next chapters of this paper.
2.4. Electromechanical Subsystem
Tiwari, Munoz-Hernandez, Acakpovi, Sattouf and
many others describe the most common ways of creating a
model representing an elctromechanical part of a SHP.
Fig. 2 PID controller representing the Governor Sub-System [3]
2.2. Servodrive
A second-order dynamic subsystem is used to represent
a servodrive performing the opening and closing of the
main water inlet gate. As mentioned in the previous parts
of this paper, some of the phenomenon are being neglected
in the proposed simulation model, especially due to the A)
construction type, i.e. the scale of the simulated
hydropower plant. On the other, even if this assumption is
in line with other scientific literature, in some cases the
water hammer phenomenon could possibly occur in the
SHP. Usually, it happens if there is a fast opening or closing
of the gate. Therefore, the saturators are being placed to
limit the position and speed of the gate movement.
B)
Fig. 3 Servodrive Sub-System (state variables are: speed of the
water inlet gate opening and its position parameters Ka and Ta
are calculated according to the type of an implemented
servodrive used in the hydroelectric scheme) [2]
2.3. Hydraulic Turbine
The Hydraulic Turbine, considered as a heart of the
hydropower plants, plays an important and irreplaceable
role in these structure, because it converts a kinetic, or C)
potential energy of the water, into the mechanical
movement that is usually transferred to the generator via a Fig. 4 Block diagram of Electromechanical Subsystem [2]
common shaft. Obviously, such an important role requires
A) Interconnection of the generator and the turbine (the common
an accurate model to be used in the simulation schemes in shaft)
order to achieve realistic and relevant results. B) Asynchronous generator model
However, there are some differences in modelling this C) Model of the mechanical system connected to the shaft
part in the published scientific papers. Many of them
consider this sub-system being able to be linearized. We are The proposed model considers an usage of an
determined, that using a non-linear model would result in a asynchronous generator described by the Closs formula.
better and more accurate simulation outcomes. On the other Considering the speed of changes in electrical and
hand, there are various ways how to take a very important hydromechanical parts of the SHP, hydrodynamic
ISSN 1335-8243 (print) ISSN 1338-3957 (online), www.aei.tuke.sk
14 Simulation and Laboratory Model of Small Hydropower Plant
processes are considerably slower, thus for the simulation
purposes it is sufficient to model a generator only in terms
of a torque equation of the common shaft between the
turbine and the generator, whereas the equation of the
equilibrium (1) is valid. [2]
/ (1)
(2)
/ (3)
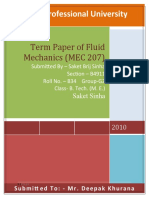
Fig. 5 3D illustration of a turbine´s efficiency (Rblades=1.9m and
where: Me is the torque of the generator, Mm the torque of Ablades=9m2), where maximum turbine’s efficiency gained is
the turbine and Mf is the frictional torque proportional to approx. 88% [1]
the mechanical angular velocity ɷm; the constant Kt in the
equation (2) represents the friction coefficient. The right
side of the equation (1) represents the dynamic torque on
the shaft, which accelerates the total moment of inertia on
the shaft Jc. Thus, Pe is the generated electrical power on
the shaft, which in case of an asynchronous machine is
proportional to product of its torque and the rotor angular
velocity ɷm. The before-mentioned assumption complies
connection of models of the asynchronous electric
generator and hydraulic turbine fixed on the common shaft
(depicted in the Fig. 4), where Tr is the rotor time constant
of the asynchronous generator corresponding to the rotor
resistance. [3][5][11]
Fig. 6 3D illustration of a turbine´s efficiency (Rblades=1.9m and
3. PROPOSED FUZZY EFFICIENCY MODEL OF A Ablades=8m2), where maximum turbine’s efficiency gained is
approx. 77% [1]
HYDRAULIC TURBINE AND LABORATORY
MODEL OF SMALL HYDROPOWER PLANT
That all means it is possible to create a so called
hydraulic turbine´s efficiency image, while using the
3.1. Fuzzy efficiency model of a hydraulic turbine
measured data of the water flow q; ∆ω and the turbine’s
efficiency at the steady state operation points, as stated
The approaches mentioned above are dependent on the below in the Table 1.
accuracy of the calculation, as well as on the precise
determination of the key parameters that are necessary for Table 1 Different steady state operation points and the
incorporating the turbines efficiency into the simulation measured turbine´s efficiency
model. However, these parameters are often not available
or have to be determined, or calculated respectively, that
leads to possible errors, as well as to making the data q [p.u.]
Efficiency [%]
preparation phase long lasting and in many times, quite 0.2 0.4 0.6 0.8 1
complicated.
Therefore, we started considering some other 0.2 12.77 30.36 36.23 37.83 37.97
possibilities, how to get rid of the uncertainty created by the
above-described process of hydraulic turbines efficiency 0.4 2.74 26.40 49.60 64.41 73.24
incorporation. The solution proposed is based on the usage ωm
[p.u.] 0.6 0.35 13.64 40.90 66.92 87.22
of Fuzzy logic. Such an approach allows to take into
account the actual condition of a SHP, e.g. the wearing of 0.8 0.04 5.68 27.20 56.26 84.31
the turbine´s blades, its runner, or a change in the blades 0.00 2.11 16.07 42.03 72.49
1
inner area, i.e. Ablades parameter, which is one of the key
values in the calculation defined by Acakpovi et al. [6],
whereas in the Fig. 5 and Fig. 6, there is an obvious change
in the maximum possible turbine´s efficiency, cause only Process of finding the fuzzy interference structure and
by the change of an already mentioned parameter. the usage of an Anfisedit software tool provided by
ISSN 1335-8243 (print) ISSN 1338-3957 (online), www.aei.tuke.sk
Acta Electrotechnica et Informatica, Vol. 22, No. 4, 2022 15
MATLAB is discussed in more details in the paper. [1][10] functions in one device. This programmable logic
As a result of the proposed determination process of a controller is used to take over the control system part,
hydraulic turbine´s efficiency, a graphical representation of shown in the Fig. 8; servo drive subsystem, as well as all
this fuzzy system is shown in the Fig. 7. the calculation connected to the operation of the simulated
behavior of the hydraulic turbine.
The control mechanism is performed by using the
functional block for the PID controller while using the
calculated and tuned parameters obtained in MATLAB, or
set up by the user. Implementation of the servo drive
subsystem is done as well via programmed structure that
supposed to give an input value for the hydraulic turbine
part, i.e. the inlet water gate vane position G[%]. All the
calculations that are performed in the MATLAB model of
the hydraulic turbine subsystem is then processed by the
PLC (programmable logic controller) with an output of the
turbine velocity [rpm] that serves as an input value for the
electrical drive while using the B&R ACOPOSinverter
8I66 series.
Moreover, a build-in TFT display serves as an HMI
Fig. 7 An example of a fuzzy representation of the hydraulic where the user has various options to adjust the process
turbine´s efficiency [1] values and thus to affect the operation, or the simulation
process respectively. Examples of these parameters are:
3.2. Laboratory model of small hydropower plant current water head value; demanded generated power
(reference value); no-load flow value, i.e. the value that
At the very beginning of the determination of the determines the efficiency of the turbine; or so called turbine
laboratory model´s structure, we had to decide how would gain (At parameter – Turbine´s Gain). Moreover, it displays
the laboratory model perform all the functionalities of each all the process data needed for the safe operation and
of the already-mentioned main simulation model simulation purposes. [7]
subsystems, i.e. turbine-control system, or so called
governor; servo drive that adjust the position of the main
water inlet gate, or of the guide vanes respectively;
hydraulic turbine; electric generator; plus the fifth part
could be considered as an electrical grid.
Fig. 9 B&R Power Panel 500 – HMI display, placed on the
front panel of the switchboard Electrical drive – ABB
3GAA101520-ADE662
Fig. 8 Block diagram of Small Hydropower Plant + Highlighted B. Electrical drive – ABB 3GAA101520-ADE662
elements [7]
We chose a three-phase cage motor to perform the
functions of the hydraulic turbine simulation model
In the Fig. 8, there is the same scheme as in the Fig. 1, subsystem in the proposed laboratory model of a SHP,
but with the difference of highlighting the part of the especially when it comes to a rotational movement of the
laboratory model overtaking the subsystem´s role. Each of turbine, or the movement of the common shaft respectively.
the elements proposed to be a part of the laboratory model Its velocity, or the input voltage value, is calculated
is described in the following subsections A-C. according to the actual demanded generated power
specification, as well as according to the parameters of the
A. PLC – Programmable Logic Controller – B&R exact parameters of the simulated hydraulic turbine.
Power Panel 500 series Because of the fixed coupling between the motor and
generator, the model represents an image of a real SHP
This, all-in-one solution depicted in the Fig. 9 was operation. (see Fig. 10) Since it has an embedded encoder,
chosen according to its ability to combine a controlling the actual position and speed are easy to be used in the
features with the HMI (Human Machine Interface) model, or in the PLC program respectively.
ISSN 1335-8243 (print) ISSN 1338-3957 (online), www.aei.tuke.sk
16 Simulation and Laboratory Model of Small Hydropower Plant
C. Asynchronous generator – ABB 3GA101520-ADE Future research and development of this model should
be aimed to provide a fully prepared model for a design and
This electrical drive is very similar to the one used as a a verification of a control mechanisms of small hydropower
simulator of hydraulic turbines behavior (subsection B). plants. Fist step is to convert the already designed
The only difference is that there is no encoder present at the MATLAB model into the PLC program, verify it and thus
machine. Thus, it is used as a generator, whereas the power create a simulator, that should basically shorten up the time
generated is fed into the grid via a recuperative converter, necessary to design and build new small hydropower plant
or to the grid directly. projects.
ACKNOWLEDGMENTS
This work was supported by the Slovak Research and
Development Agency under the Contract no. APVV-19-
0210.
REFERENCES
[1] OLEXA, R. ‒ PERDUKOVÁ, D. – FEDOR, P.: Fuzzy
Approach of Modeling a Hydraulic Turbine
Fig. 10 Laboratory Model: Controlled Electrical Drive: Efficicency, MM Science Journal, Prague, November
Hydraulic Turbine (Left) and Asynchronous generator (Right) 2020, pp. 4086-4092. ISSN 1803-1269.
with the fixed coupling and common shaft
[2] FEDOR, P. – PERDUKOVÁ, D. – OLEXA, R.:
Additionally, the ABB CT PRO XT 40 current Modelling a Small Hydropower Plant, Proc.
transformers are put in the scheme to transform the primary Energetika 2019, Stará Lesná, pp. 352-356. ISBN:
currents to secondary ones for c.a. measurements. Such a 978-80-553-3324-3.
topology gives us the opportunity to monitor fast changes [3] MUNOZ-HERNANDEZ, G. ‒ MANSOOR, S. ‒
that could occur in the electrical part of the SHP and JONES, D.: Modelling and Controlling Hydropower
process them quickly with B&R X20AP3131 module, Plants, 1st Edition. London : Springer London Ltd,
which measures active, reactive and apparent power 2013. p. 299. ISBN: 978-1-4471-6221-6.
individually for each phase as well as all of them
collectively. In addition, this module provides the RMS [4] IEEE: IEEE Guide for Control of Small Hydroelectric
values for voltage and current on the 3 phases. Definitely, Power Plants IEEE Std 1020-1988, vol., no., pp.1-36,
for such fast changing parameters we need to secure fast 28 Nov. 1988.
processing as well. Therefore, a B&R PLC X20 CP1686X [5] FEDOR, P. ‒ PERDUKOVÁ, D. ‒ RADVÁNI, P.:
is included in the scheme and the communication of both Modelovanie Malých Vodných Elektrárn,. Proc.
PLC included in the scheme is done via OPC UA standard. ARTEP 2019: 13. ročník Konferencie odborníkov z
[7 ] univerzít, vysokých škôl a praxe. Stará Lesná:. p. 001-
00.
4. DISCUSSION AND CONCLUSION [6] ACAKPOVI, A. – HAGAN, E. B. ‒ FIFATIN, F. X.:
Review of Hydropower Plant Models, International
The authors have presented the complex simulation Journal of Computer Applications, vol. 18, December
scheme of small hydropower plant in the MATLAB 2014, pp. 33-38.
environment, while considering other unique options of [7] OLEXA, R.: Laboratory Model of Small Hydropower
improving the already-published ways of simulating these Plant for Simulation Purposes, Proc. SCYR 2022, pp.
systems, i.e. the fuzzy model of hydraulic turbine´s 167 – 169, 2022, ISBN: 978-80-553-4061-6.
efficiency. The use of the fuzzy modeling was chosen and
applied mainly to show how the turbine´s efficiency [8] TIWARI, J. et al.: Modelling and Simulation of Hydro
changes due to the wearing of the turbine itself. Thus, this Power Plant using MATLAB & WatPro 3.0.,
should be incorporated in the model of the small Intelligent Systems and Applications, 2015, 08, pp. 1-
hydropower plant however, the propriate form has to be set. 8. DOI: 10.5815/ijisa.2015.08.01.
Using an Anfisedit tool in MATLAB is proposed to serve [9] SATTOUF, M.: Simulation Model of Hydro Power
this purpose, i.e. create such like a turbine´s efficiency Plant Using Matlab/Simulink, International Journal of
maps, that would be used in the simulation process based Engineering Research and Applications, vol. 1, Brno:
on the preset conditions and turbine´s wearing level. IJERA, 2014, pp. 295-301. ISSN: 2248-962.
To sum up, referring to the research done in the field of
modeling the small hydropower plants, the authors have [10] PERDUKOVÁ, D. ‒ FEDOR, P. ‒ LACKO, M.: DC
designed and described proposed laboratory model of an Motor Fuzzy Model Based Optimal Controller. MM
SHP that should allow the users to easily develop and verify Science Journal, pp. 4879-4885, 2021. ISSN: 1803-
potentially new control schemes and methods, e.g. fuzzy 1269. DOI: 10.17973/MMSJ.2021_10_2021033.
controller as a replacement of a usually used control [11] PERDUKOVÁ, D. ‒ PALACKÝ, P. ‒ FEDOR, P. -
scheme mentioned before in the paper, etc. BOBER, P. - FEDÁK, V.: Dynamic Identification of
ISSN 1335-8243 (print) ISSN 1338-3957 (online), www.aei.tuke.sk
Acta Electrotechnica et Informatica, Vol. 22, No. 4, 2022 17
Rotor Magnetic Flux, Torque and Rotor Resistance of simulation models.
Induction Motor. IEEE Access, Vol. 8, 2020, pp.
142003-142015. Pavol Fedor was born in Kosice in 1956. He received the
MSc degree in Technical Cybernetics from Technical
University of Košice in 1980 and Ph.D degree in 1986 at
Received May 16, 2022, accepted December 28, 2022 the same University. During 1980 – 1988 he served as an
Assistant Professor of Electrical Drives at the Technical
University of Košice at the Department of Electrotechnics,
BIOGRAPHIES Mechatronics and Industrial Engineering. He currently
works as a Professor of Power Electronics at the same
Richard Olexa was born in 1995 in Kosice. In 1991 he university. During 1996 – 1998 he was involved in research
graduated (Ing.) with honors at the department of Electrical for continuous line control in USS firm, Kosice. He has
Engineering and Mechatronics of the Faculty of Electrical extensive experience in installing of control systems in
Engineering and Informatics at Technical University of industry. In theoretical area his current research activities
Kosice, Slovakia. He is currently in the third year of his are focused on the development of control structures by
PhD studies, focusing mainly on the small hydropower means of Lyapunov´s second method for electrical drives
plants systems, especially concerning its modeling a and multi-input multi-output systems.
ISSN 1335-8243 (print) ISSN 1338-3957 (online), www.aei.tuke.sk
You might also like
- Essentials of The Living World 5th Edition George Johnson Solutions ManualNo ratings yetEssentials of The Living World 5th Edition George Johnson Solutions Manual4 pages
- Tarea #3: Difusión en Estado Estacionario y Pseudoestacionario Sin Reacción QuímicaNo ratings yetTarea #3: Difusión en Estado Estacionario y Pseudoestacionario Sin Reacción Química8 pages
- Bueno Usar Figurasanalysis - of - Battery - Lifetime - Extension - in - A - Small-Scale - Wind-Energy - System - Using - SupercapacitorsNo ratings yetBueno Usar Figurasanalysis - of - Battery - Lifetime - Extension - in - A - Small-Scale - Wind-Energy - System - Using - Supercapacitors10 pages
- Fuzzy Logic Controller For Hybrid Renewable Energy SystemNo ratings yetFuzzy Logic Controller For Hybrid Renewable Energy System6 pages
- Dynamic Modelling of A Combined Cycle Power Plant WithNo ratings yetDynamic Modelling of A Combined Cycle Power Plant With11 pages
- A State-Space Dynamic Model For Photovoltaic Systems With Full Ancillary Services SupportNo ratings yetA State-Space Dynamic Model For Photovoltaic Systems With Full Ancillary Services Support10 pages
- Pumped Storage Hydro-Plant Models For System Transient and Long-Term Dynamic StudiesNo ratings yetPumped Storage Hydro-Plant Models For System Transient and Long-Term Dynamic Studies8 pages
- Design and Performance Analysis of A Photovoltaic WaterNo ratings yetDesign and Performance Analysis of A Photovoltaic Water8 pages
- Electric Vehicle Powertrain Architecture and ContrNo ratings yetElectric Vehicle Powertrain Architecture and Contr13 pages
- General Model For Representing Variable Speed Wind Turbines in Power System Dynamics SimulationsNo ratings yetGeneral Model For Representing Variable Speed Wind Turbines in Power System Dynamics Simulations8 pages
- Modeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy ConversionNo ratings yetModeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy Conversion39 pages
- Dynamic Modelling of A Combined Cycle Power Plant With ThermosysproNo ratings yetDynamic Modelling of A Combined Cycle Power Plant With Thermosyspro11 pages
- Small Scale Hydropower: Generator Analysis and Optimization For Water Supply SystemsNo ratings yetSmall Scale Hydropower: Generator Analysis and Optimization For Water Supply Systems8 pages
- An Open Source Modelica Implementation of The IEC 61400-27-1 Type 4 Wind Turbine Model For Power System Stability AssessmentNo ratings yetAn Open Source Modelica Implementation of The IEC 61400-27-1 Type 4 Wind Turbine Model For Power System Stability Assessment8 pages
- Modeling and Simulation of Photovoltaic Water Pumping SystemNo ratings yetModeling and Simulation of Photovoltaic Water Pumping System6 pages
- 2012 (IET) Passivity Based Control of An Asymmetric Nine Level InverterNo ratings yet2012 (IET) Passivity Based Control of An Asymmetric Nine Level Inverter11 pages
- Design and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded GenerationNo ratings yetDesign and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded Generation24 pages
- CFD Based Analysis of Pumped Storage Power Plants Implementing - 2024 - AppliedNo ratings yetCFD Based Analysis of Pumped Storage Power Plants Implementing - 2024 - Applied16 pages
- Power Quality Control of Hybrid Wind Power Generation with Battery Storage Using Fuzzy-LQR ControllerNo ratings yetPower Quality Control of Hybrid Wind Power Generation with Battery Storage Using Fuzzy-LQR Controller7 pages
- 2009 Control Strategies for a Simple Point-Absorber Connected to a Hydraulic Power Take-OffNo ratings yet2009 Control Strategies for a Simple Point-Absorber Connected to a Hydraulic Power Take-Off10 pages
- 2011 Application of Hydraulic System in Wave Energy ConverterNo ratings yet2011 Application of Hydraulic System in Wave Energy Converter9 pages
- Analysis of Wind Power Integration Capacity in Wind-Hydro-Thermal Hybrid Power SystemNo ratings yetAnalysis of Wind Power Integration Capacity in Wind-Hydro-Thermal Hybrid Power System8 pages
- Design and Performance Evaluation of A Solar Water Pumping System: A Case StudyNo ratings yetDesign and Performance Evaluation of A Solar Water Pumping System: A Case Study8 pages
- Driving High Voltage Piezoelectric Actuators in Microrobotic Applications 2012No ratings yetDriving High Voltage Piezoelectric Actuators in Microrobotic Applications 201212 pages
- State Space Model of Grid Connected Inverters Under Current Control ModeNo ratings yetState Space Model of Grid Connected Inverters Under Current Control Mode10 pages
- The Application of Super Capacitors To Relieve Battery-Storage Systems in Autonomous Renewable Energy SystemsNo ratings yetThe Application of Super Capacitors To Relieve Battery-Storage Systems in Autonomous Renewable Energy Systems6 pages
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesNo ratings yetBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind Turbines8 pages
- Grid Synchronization of Renewable Generation Systems Using Synchronous Power ControllersNo ratings yetGrid Synchronization of Renewable Generation Systems Using Synchronous Power Controllers6 pages
- Determining Parameters of Turbine's Model 2007No ratings yetDetermining Parameters of Turbine's Model 20077 pages
- Power Grid Synchronization by Controlling Frequency For Hydropower PlantsNo ratings yetPower Grid Synchronization by Controlling Frequency For Hydropower Plants47 pages
- Hydraulic Turbine and Turbine Control Models For System Pynamic Studies PDFNo ratings yetHydraulic Turbine and Turbine Control Models For System Pynamic Studies PDF13 pages
- Model Predictive Control Using Euler Method For Switched-Battery Boost-Multilevel InverterNo ratings yetModel Predictive Control Using Euler Method For Switched-Battery Boost-Multilevel Inverter12 pages
- Design and Performance Evaluation of A Solar Water Pumping System: A Case StudyNo ratings yetDesign and Performance Evaluation of A Solar Water Pumping System: A Case Study8 pages
- Optimal Control of Variable Speed Wind TurbinesNo ratings yetOptimal Control of Variable Speed Wind Turbines7 pages
- 2011 a Generic Outline for Dynamic Modeling of Ocean Wave and Tidal Current Energy Conversion SystemsNo ratings yet2011 a Generic Outline for Dynamic Modeling of Ocean Wave and Tidal Current Energy Conversion Systems6 pages
- New ideas for a soft synchronizer applied to chp cogenertaionNo ratings yetNew ideas for a soft synchronizer applied to chp cogenertaion11 pages
- Performance Improvement of A PV-powered Induction-Motor-Driven Water Pumping SystemNo ratings yetPerformance Improvement of A PV-powered Induction-Motor-Driven Water Pumping System7 pages
- Design and Performance Evaluation of A Solar Water Pumping System: A Case StudyNo ratings yetDesign and Performance Evaluation of A Solar Water Pumping System: A Case Study8 pages
- Journal of Power Sources: Jaroslaw Milewski, Giulio Guandalini, Stefano CampanariNo ratings yetJournal of Power Sources: Jaroslaw Milewski, Giulio Guandalini, Stefano Campanari9 pages
- Modeling and Control of Isolated Micro-Hydro Power Plant With Battery Storage SystemNo ratings yetModeling and Control of Isolated Micro-Hydro Power Plant With Battery Storage System7 pages
- A 1:1 Prototype of Power Generation System Based Upon Cross-Flow Water TurbinesNo ratings yetA 1:1 Prototype of Power Generation System Based Upon Cross-Flow Water Turbines5 pages
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyNo ratings yetSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic Energy8 pages
- Smoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor SystemNo ratings yetSmoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor System6 pages
- Dynamic Modeling and Analysis of A Remote Hybrid Power System With Pumped Hydro StorageNo ratings yetDynamic Modeling and Analysis of A Remote Hybrid Power System With Pumped Hydro Storage16 pages
- Construction_of_an_example_system_for_ACDC_hybrid_No ratings yetConstruction_of_an_example_system_for_ACDC_hybrid_6 pages
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- 3704 US White Paper Transducer Repair 20 07No ratings yet3704 US White Paper Transducer Repair 20 0712 pages
- Hydraulic Power Units: D, H and V-Pak SeriesNo ratings yetHydraulic Power Units: D, H and V-Pak Series30 pages
- Electric Pow Uality: Tutorial Lntro: G.T. Heydt Arizona Sfufe UniversityNo ratings yetElectric Pow Uality: Tutorial Lntro: G.T. Heydt Arizona Sfufe University5 pages
- Parameters For Selection of Pumps For Different Applications67% (3)Parameters For Selection of Pumps For Different Applications10 pages
- EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval AcademyNo ratings yetEN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy13 pages
- Covalent & Metallic Bonds: Chapter 13 Section 3No ratings yetCovalent & Metallic Bonds: Chapter 13 Section 320 pages
- MHT-CET Chemistry Previous Solved Papers (PSP) - Sample Content100% (1)MHT-CET Chemistry Previous Solved Papers (PSP) - Sample Content31 pages
- A_Comprehensive_Review_on_STATCOM_Paradigm_of_Modeling_Control_Stability_Optimal_Location_Integration_Application_and_InstallationNo ratings yetA_Comprehensive_Review_on_STATCOM_Paradigm_of_Modeling_Control_Stability_Optimal_Location_Integration_Application_and_Installation29 pages
- Precalculus with Limits 3rd Edition Ron Larsoninstant download100% (1)Precalculus with Limits 3rd Edition Ron Larsoninstant download43 pages

























































































- Essentials of The Living World 5th Edition George Johnson Solutions ManualEssentials of The Living World 5th Edition George Johnson Solutions Manual
- Tarea #3: Difusión en Estado Estacionario y Pseudoestacionario Sin Reacción QuímicaTarea #3: Difusión en Estado Estacionario y Pseudoestacionario Sin Reacción Química
- Bueno Usar Figurasanalysis - of - Battery - Lifetime - Extension - in - A - Small-Scale - Wind-Energy - System - Using - SupercapacitorsBueno Usar Figurasanalysis - of - Battery - Lifetime - Extension - in - A - Small-Scale - Wind-Energy - System - Using - Supercapacitors
- Fuzzy Logic Controller For Hybrid Renewable Energy SystemFuzzy Logic Controller For Hybrid Renewable Energy System
- Dynamic Modelling of A Combined Cycle Power Plant WithDynamic Modelling of A Combined Cycle Power Plant With
- A State-Space Dynamic Model For Photovoltaic Systems With Full Ancillary Services SupportA State-Space Dynamic Model For Photovoltaic Systems With Full Ancillary Services Support
- Pumped Storage Hydro-Plant Models For System Transient and Long-Term Dynamic StudiesPumped Storage Hydro-Plant Models For System Transient and Long-Term Dynamic Studies
- Design and Performance Analysis of A Photovoltaic WaterDesign and Performance Analysis of A Photovoltaic Water
- Electric Vehicle Powertrain Architecture and ContrElectric Vehicle Powertrain Architecture and Contr
- General Model For Representing Variable Speed Wind Turbines in Power System Dynamics SimulationsGeneral Model For Representing Variable Speed Wind Turbines in Power System Dynamics Simulations
- Modeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy ConversionModeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy Conversion
- Dynamic Modelling of A Combined Cycle Power Plant With ThermosysproDynamic Modelling of A Combined Cycle Power Plant With Thermosyspro
- Small Scale Hydropower: Generator Analysis and Optimization For Water Supply SystemsSmall Scale Hydropower: Generator Analysis and Optimization For Water Supply Systems
- An Open Source Modelica Implementation of The IEC 61400-27-1 Type 4 Wind Turbine Model For Power System Stability AssessmentAn Open Source Modelica Implementation of The IEC 61400-27-1 Type 4 Wind Turbine Model For Power System Stability Assessment
- Modeling and Simulation of Photovoltaic Water Pumping SystemModeling and Simulation of Photovoltaic Water Pumping System
- 2012 (IET) Passivity Based Control of An Asymmetric Nine Level Inverter2012 (IET) Passivity Based Control of An Asymmetric Nine Level Inverter
- Design and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded GenerationDesign and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded Generation
- CFD Based Analysis of Pumped Storage Power Plants Implementing - 2024 - AppliedCFD Based Analysis of Pumped Storage Power Plants Implementing - 2024 - Applied
- Power Quality Control of Hybrid Wind Power Generation with Battery Storage Using Fuzzy-LQR ControllerPower Quality Control of Hybrid Wind Power Generation with Battery Storage Using Fuzzy-LQR Controller
- 2009 Control Strategies for a Simple Point-Absorber Connected to a Hydraulic Power Take-Off2009 Control Strategies for a Simple Point-Absorber Connected to a Hydraulic Power Take-Off
- 2011 Application of Hydraulic System in Wave Energy Converter2011 Application of Hydraulic System in Wave Energy Converter
- Analysis of Wind Power Integration Capacity in Wind-Hydro-Thermal Hybrid Power SystemAnalysis of Wind Power Integration Capacity in Wind-Hydro-Thermal Hybrid Power System
- Design and Performance Evaluation of A Solar Water Pumping System: A Case StudyDesign and Performance Evaluation of A Solar Water Pumping System: A Case Study
- Driving High Voltage Piezoelectric Actuators in Microrobotic Applications 2012Driving High Voltage Piezoelectric Actuators in Microrobotic Applications 2012
- State Space Model of Grid Connected Inverters Under Current Control ModeState Space Model of Grid Connected Inverters Under Current Control Mode
- The Application of Super Capacitors To Relieve Battery-Storage Systems in Autonomous Renewable Energy SystemsThe Application of Super Capacitors To Relieve Battery-Storage Systems in Autonomous Renewable Energy Systems
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind Turbines
- Grid Synchronization of Renewable Generation Systems Using Synchronous Power ControllersGrid Synchronization of Renewable Generation Systems Using Synchronous Power Controllers
- Power Grid Synchronization by Controlling Frequency For Hydropower PlantsPower Grid Synchronization by Controlling Frequency For Hydropower Plants
- Hydraulic Turbine and Turbine Control Models For System Pynamic Studies PDFHydraulic Turbine and Turbine Control Models For System Pynamic Studies PDF
- Model Predictive Control Using Euler Method For Switched-Battery Boost-Multilevel InverterModel Predictive Control Using Euler Method For Switched-Battery Boost-Multilevel Inverter
- Design and Performance Evaluation of A Solar Water Pumping System: A Case StudyDesign and Performance Evaluation of A Solar Water Pumping System: A Case Study
- 2011 a Generic Outline for Dynamic Modeling of Ocean Wave and Tidal Current Energy Conversion Systems2011 a Generic Outline for Dynamic Modeling of Ocean Wave and Tidal Current Energy Conversion Systems
- New ideas for a soft synchronizer applied to chp cogenertaionNew ideas for a soft synchronizer applied to chp cogenertaion
- Performance Improvement of A PV-powered Induction-Motor-Driven Water Pumping SystemPerformance Improvement of A PV-powered Induction-Motor-Driven Water Pumping System
- Design and Performance Evaluation of A Solar Water Pumping System: A Case StudyDesign and Performance Evaluation of A Solar Water Pumping System: A Case Study
- Journal of Power Sources: Jaroslaw Milewski, Giulio Guandalini, Stefano CampanariJournal of Power Sources: Jaroslaw Milewski, Giulio Guandalini, Stefano Campanari
- Modeling and Control of Isolated Micro-Hydro Power Plant With Battery Storage SystemModeling and Control of Isolated Micro-Hydro Power Plant With Battery Storage System
- A 1:1 Prototype of Power Generation System Based Upon Cross-Flow Water TurbinesA 1:1 Prototype of Power Generation System Based Upon Cross-Flow Water Turbines
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergySupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic Energy
- Smoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor SystemSmoothing of Grid-Connected Wind-Diesel Power Output Using Energy Capacitor System
- Dynamic Modeling and Analysis of A Remote Hybrid Power System With Pumped Hydro StorageDynamic Modeling and Analysis of A Remote Hybrid Power System With Pumped Hydro Storage
- Construction_of_an_example_system_for_ACDC_hybrid_Construction_of_an_example_system_for_ACDC_hybrid_
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld Simulator
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS Devices
- Electric Pow Uality: Tutorial Lntro: G.T. Heydt Arizona Sfufe UniversityElectric Pow Uality: Tutorial Lntro: G.T. Heydt Arizona Sfufe University
- Parameters For Selection of Pumps For Different ApplicationsParameters For Selection of Pumps For Different Applications
- EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval AcademyEN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academy
- MHT-CET Chemistry Previous Solved Papers (PSP) - Sample ContentMHT-CET Chemistry Previous Solved Papers (PSP) - Sample Content
- A_Comprehensive_Review_on_STATCOM_Paradigm_of_Modeling_Control_Stability_Optimal_Location_Integration_Application_and_InstallationA_Comprehensive_Review_on_STATCOM_Paradigm_of_Modeling_Control_Stability_Optimal_Location_Integration_Application_and_Installation
- Precalculus with Limits 3rd Edition Ron Larsoninstant downloadPrecalculus with Limits 3rd Edition Ron Larsoninstant download