Using MC683xx M-Bus Software To Communicate Between Processor Systems
Using MC683xx M-Bus Software To Communicate Between Processor Systems
Download as pdf or txt
You might also like
- Switching Interview Questions and Answers Vol 1.0Document14 pagesSwitching Interview Questions and Answers Vol 1.0Eduardo AguilarNo ratings yet
- Axia Price List 130901Document33 pagesAxia Price List 130901Stephen Walker-WeinshenkerNo ratings yet
- I2c PDFDocument14 pagesI2c PDFJALEELA_CNo ratings yet
- Using Modbus With Mach3Document14 pagesUsing Modbus With Mach3rafaeldesouzamartinsNo ratings yet
- Using The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDocument14 pagesUsing The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDario Darius100% (2)
- AF-6 Series Drives Modbus RTUDocument12 pagesAF-6 Series Drives Modbus RTUshijub_001No ratings yet
- Cpu BusDocument31 pagesCpu BusK.R.RaguramNo ratings yet
- I 2 CDocument23 pagesI 2 CKaushal Kumar100% (1)
- 3.1. Spurious Power Suppression TechniqueDocument9 pages3.1. Spurious Power Suppression Techniqueachuu1987No ratings yet
- 8251 Material PDFDocument31 pages8251 Material PDFskarthikpriyaNo ratings yet
- UNIT IV EmbeddedDocument16 pagesUNIT IV EmbeddedeswaranNo ratings yet
- Design AssignmentDocument9 pagesDesign Assignmentrfvb5qtxk4No ratings yet
- Communication InterfaceDocument21 pagesCommunication InterfaceRodger UcheNo ratings yet
- Unit 3Document37 pagesUnit 3Vaibhav HolkarNo ratings yet
- Application Note 135 April 2012 Implementing Robust Pmbus System Software For The Ltc3880Document12 pagesApplication Note 135 April 2012 Implementing Robust Pmbus System Software For The Ltc3880HahdNo ratings yet
- How To Use IIC On S08Document18 pagesHow To Use IIC On S08Manuel Enrique GutierrezNo ratings yet
- Paging and Lac SplittingDocument28 pagesPaging and Lac SplittingSyed Muhammad Kamran100% (6)
- MLX90614 SMBusDocument32 pagesMLX90614 SMBustime machineNo ratings yet
- ATM (Asynchronous Transfer Mode)Document4 pagesATM (Asynchronous Transfer Mode)Shejin RaghavanNo ratings yet
- Asynchronous Bus.Document3 pagesAsynchronous Bus.Art SparkkNo ratings yet
- Module 2 - Switching ConceptsDocument9 pagesModule 2 - Switching ConceptsMMbabuNo ratings yet
- 01-07 Ciphering ProcedureDocument7 pages01-07 Ciphering ProcedureShahebul Hasan AuneeNo ratings yet
- Module 2 - Switching ConceptsDocument8 pagesModule 2 - Switching Conceptsjessie143louNo ratings yet
- Embedded Systems Architecture Device Drivers - Part 3 On Board Bus Device Drivers PDFDocument7 pagesEmbedded Systems Architecture Device Drivers - Part 3 On Board Bus Device Drivers PDFsergeysergey1No ratings yet
- Reseaux GSM Et UmtsDocument4 pagesReseaux GSM Et UmtsadjadNo ratings yet
- Board Buses: System Buses (Also Referred To As "Main," "Local," or "Processor-Memory" Buses)Document8 pagesBoard Buses: System Buses (Also Referred To As "Main," "Local," or "Processor-Memory" Buses)Soundarya SvsNo ratings yet
- Telecoms ModernesDocument4 pagesTelecoms ModernesadjadNo ratings yet
- Etude de La Signalisation Ss7: Universite de Sidi Bel AbbesDocument4 pagesEtude de La Signalisation Ss7: Universite de Sidi Bel AbbesadjadNo ratings yet
- Television Et TransmissionDocument4 pagesTelevision Et TransmissionadjadNo ratings yet
- BSC Configuration Bss OverviewDocument17 pagesBSC Configuration Bss OverviewJesus Percival BarattaNo ratings yet
- GSM Radio Parameter Setting and Adjustment: GSM P&O DepartmentDocument60 pagesGSM Radio Parameter Setting and Adjustment: GSM P&O DepartmentAhmed Hamed BadrNo ratings yet
- Projectreport ForwardingDocument12 pagesProjectreport ForwardingAbhishekKoneruNo ratings yet
- GSM Radio Frequ-WPS OfficeDocument7 pagesGSM Radio Frequ-WPS OfficeEsam SamNo ratings yet
- Mechatronics Interfacing Sensors-1Document50 pagesMechatronics Interfacing Sensors-1Tanvi ChaudharyNo ratings yet
- I2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumDocument18 pagesI2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumShuvra Saha100% (1)
- Design and Simulation of Uart Protocol Based On Verilog: B.Jeevan & M.NeerajaDocument4 pagesDesign and Simulation of Uart Protocol Based On Verilog: B.Jeevan & M.NeerajaTushar JainNo ratings yet
- Layer 3 Routing On MLSDocument18 pagesLayer 3 Routing On MLSKuldeep DidwaniaNo ratings yet
- 1.8 Discontinuous Reception and Discontinuous TransmissionDocument2 pages1.8 Discontinuous Reception and Discontinuous Transmissionnaveedraza4213No ratings yet
- Paging and Lac SplittingDocument28 pagesPaging and Lac SplittingTushar ChaudhariNo ratings yet
- PRONEM-midi Register Address For Modbus RtuDocument12 pagesPRONEM-midi Register Address For Modbus Rtumaxwell onyekachukwuNo ratings yet
- Module 2Document7 pagesModule 2هبة عمار كاظمNo ratings yet
- MIL STD 1553 OverviewDocument54 pagesMIL STD 1553 OverviewshyamsundarsrNo ratings yet
- IJAER Ok 23043-23052Document10 pagesIJAER Ok 23043-23052vijayNo ratings yet
- BusesDocument5 pagesBusesderry6271No ratings yet
- A On Summer Vocational Training: Bharat Sanchar Nigam LimitedDocument20 pagesA On Summer Vocational Training: Bharat Sanchar Nigam LimitedMohammad ShoebNo ratings yet
- Design of I2C Master With Multiple SlaveDocument4 pagesDesign of I2C Master With Multiple SlaveEditor IJRITCC100% (1)
- IO BusesDocument17 pagesIO BusessenasriramNo ratings yet
- Rajavardhan UTMIDocument69 pagesRajavardhan UTMIRajavardhan_Re_6459No ratings yet
- B. Tech ProjectDocument52 pagesB. Tech ProjectSanthosh KammamNo ratings yet
- Communication Methods (Protocols, Format & Language) For The Substation Automation & Control by MUHAMMAD UZAIR (Project Report of Course 586 B)Document10 pagesCommunication Methods (Protocols, Format & Language) For The Substation Automation & Control by MUHAMMAD UZAIR (Project Report of Course 586 B)Nima MahmoudpourNo ratings yet
- Synchronizing Two FPGA's For A Reliable Communication: Mercy SubaramanDocument4 pagesSynchronizing Two FPGA's For A Reliable Communication: Mercy SubaramanIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- COA_Module4Document19 pagesCOA_Module4nithyaniharikabv2005No ratings yet
- Comparing Motorola and Intel Math CoprocessorsDocument7 pagesComparing Motorola and Intel Math Coprocessorskaushik_1991No ratings yet
- UART Interface To A Computer Using ARM MicrocontrollerDocument8 pagesUART Interface To A Computer Using ARM Microcontrollerhariskhalid1100% (2)
- 1-Part Class-2 Bus Structure in Computer ArchitectureDocument5 pages1-Part Class-2 Bus Structure in Computer ArchitectureEgwali AnnieNo ratings yet
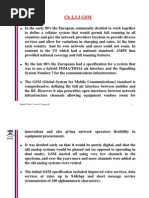
- CH 2.3.3 GSM: Magda El Zarki - Tcom 510 - Spring 98 1Document14 pagesCH 2.3.3 GSM: Magda El Zarki - Tcom 510 - Spring 98 1zultharNo ratings yet
- Starting Guide for Postfix Mail Server Configuration Supporting Anti Spam and Anti VirusFrom EverandStarting Guide for Postfix Mail Server Configuration Supporting Anti Spam and Anti VirusNo ratings yet
- Configuration of Postfix Mail Server Supporting Anti Spam and Anti VirusFrom EverandConfiguration of Postfix Mail Server Supporting Anti Spam and Anti VirusNo ratings yet
- VA5xx Modbus RTU TCP Slave Installation 1.11 ENDocument24 pagesVA5xx Modbus RTU TCP Slave Installation 1.11 ENgianf1963No ratings yet
- Yamaha Product OverviewDocument19 pagesYamaha Product OverviewamizanNo ratings yet
- OS RecDocument125 pagesOS RecVicter PaulNo ratings yet
- 5th Sem - CBCS Question PapersDocument31 pages5th Sem - CBCS Question PapersDilipNo ratings yet
- VsatDocument26 pagesVsatBambang Waluyojati, S.Kom100% (7)
- Pengertian APIDocument9 pagesPengertian APIBowo RelawantoNo ratings yet
- Microsoft Picture It PublishingDocument22 pagesMicrosoft Picture It PublishingDanielle Elish GocoNo ratings yet
- Unit1 Parallel and DistributedDocument21 pagesUnit1 Parallel and DistributedRajveer SinghNo ratings yet
- Materi 9 - Proses Pembangunan Panggilan GSMDocument69 pagesMateri 9 - Proses Pembangunan Panggilan GSMDhea Ayu AnggrainiNo ratings yet
- SNIA Tutorial 3 Everything You Wanted To Know About StorageDocument48 pagesSNIA Tutorial 3 Everything You Wanted To Know About StorageManoj Kumar MauryaNo ratings yet
- BBBBBBBBDocument2 pagesBBBBBBBBPotenchin Tony FlorinNo ratings yet
- English To TeluguDocument1 pageEnglish To TeluguKalyaniNo ratings yet
- NetPoint Pro 3x2.4 G2 Data SheetDocument2 pagesNetPoint Pro 3x2.4 G2 Data SheetMartine OneNo ratings yet
- Ezoflash4v5 InstallDocument2 pagesEzoflash4v5 InstallpekiilicNo ratings yet
- Roaming SettingsDocument6 pagesRoaming SettingsBobby Iskandar SaineNo ratings yet
- VH121-A2-A0 Datasheet en 201606 PDFDocument3 pagesVH121-A2-A0 Datasheet en 201606 PDFnameshNo ratings yet
- Scenario:: Please Read Through The Scenario, Then Write Your Answer in The Space ProvidedDocument4 pagesScenario:: Please Read Through The Scenario, Then Write Your Answer in The Space ProvidedSANSKAR SHARMANo ratings yet
- DOC-02-072 - C - HS-NCM Sales DatasheetDocument4 pagesDOC-02-072 - C - HS-NCM Sales Datasheetluisrruiz_123No ratings yet
- Changes From SharePoint 2010 To SharePoint 2013Document19 pagesChanges From SharePoint 2010 To SharePoint 2013Girithar M SundaramNo ratings yet
- Nautitech Spitfire Brochure 2019Document2 pagesNautitech Spitfire Brochure 2019sreeramk13No ratings yet
- Concepts of Multimedia Processing and TransmissionDocument63 pagesConcepts of Multimedia Processing and TransmissionvelmanirNo ratings yet
- GR200Document4 pagesGR200Javier PachaNo ratings yet
- Building Android Games With Cocos2d-X - Sample ChapterDocument18 pagesBuilding Android Games With Cocos2d-X - Sample ChapterPackt PublishingNo ratings yet
- FlashDocument13 pagesFlashMichael HanleyNo ratings yet
- User Interface DesignDocument29 pagesUser Interface Designdprini1978No ratings yet
- 16-Bit RISC PROCESSORDocument16 pages16-Bit RISC PROCESSORCroitoru Adrian100% (1)
- 10777A ENU TrainerHandbook Part4Document150 pages10777A ENU TrainerHandbook Part4Jacob Mellado67% (3)
- FPGA Implementation of An OFDM Modem: Aifeng Ren, Ming Luo, Fangming HuDocument4 pagesFPGA Implementation of An OFDM Modem: Aifeng Ren, Ming Luo, Fangming HuasitNo ratings yet
- Lecture 4 Program Loops and ArraysDocument50 pagesLecture 4 Program Loops and ArraysAnonymous E9ySJLqsNo ratings yet